合志市栄のマイファブラボ SAKAEPC
ものづくりサポートCAD講座
SketchUp 8 でアニメーション作成
人体を扱う 4・・・Aki登場 「makehuman」と連携3
[進む↓]
コチラの世界に合わせて?宇宙服を着せましょう。
「人体」を動かす で使用した「人体[Standing.skp]」を開いてください。

グループ化して後方に1000移動
「フォローミー」で半径200の球を描いて「グループを作成」、上に「移動コピー」

顔に合わせて「回転」

「移動」
球の一方の「端点」を、頭の頂点から引いた補助線の「エッジ」に合わせています。

「尺度(選択したエンティティを尺度変更および伸縮)」

「移動(緑と青の軸方向、数値入力)」と組み合わせて調整しています。
図では、選択した「グリップ」を動かす際、仮に引いた補助線の「端点」に合わせて希望の寸法にしています。

描くのはシースルーの宇宙服?です。
ヘルメットの前面を「色_009(不透明度 50)」

他を「色_A01(不透明度 50)」

二つのグループに分けています。
人体の色(三色)を削除

デフォルトのマテリアルに置き換えられました。

「球」を「肩」にコピー

「尺度(選択したエンティティを尺度変更および伸縮)」

[Ctrl]キーと[Shift]キーの組み合わせで、「変形」とともに微妙な「移動」が行えます。
上腕を(ある程度 =^x^;=)覆うように調整します。

「移動」と「回転」も行っていますが、「変形」はこの段階では「尺度」操作のみ(断面は楕円のまま)としています。
腕と足を「球を変形」した三つのグループで構成、胴体(肩、胴、腰)も同様です。 足は、かかとから進めています。

選択した「グリップ」によって、尺度を変更する軸(赤/緑/青)の方向と数が変わる
「尺度」による「球を変形」では覆いきれない部分は、個別に「グループを編集」します。

不要部を「消去」

残りの形状の底辺を選択→「尺度」で変形

続けて「回転」で変形

ミラー反転
「人体」の中心に補助線を(ここでは「原点」から)引く、補助線を含めて腕と足を選択(7個のエンティティ)、移動コピー
選択状態のまま「尺度」→ここでは「赤の尺度」でグリップを反対側へ「-1.00」押し込む

補助線(中心線)の「端点」を基準に「移動」、不要となった補助線を「消去」
前ページで頭部を詳細に描いたファイル「00None.skp」から、コピーしています。

もう一方は「人体を扱う 2・・・写真を張り付けて顔を創ろう」で作成した「顔面」です。
頭部→「グループを編集」→顔面が重なる面を「消去」→「全てのエッジを一括して非表示にする」

エッジをソフトニング/スムージング
残りのグループにも同様の操作を行います。

Akiの首を「エッジを非表示」にしたものに置き換え、元は取っておきます。

肌色で「ペイント」

「肩」、「胸」、「胴」、「腰」をコピー

「首」、「肩」、「胸」、「胴」、「腰」→「尺度」→「均等尺度 中心を基準(尺度 1.10)」、図は「腰」

衣服にするため、体より大きくしています。
衣服の「首」を「Aki」側にコピー

黒く塗り、「頭部」と干渉しないよう「移動」しています。

Yuki(誰?=^x^;=)の衣服は、「黒(不透明度 50)」と、用意されたマテリアルから「水_プール」で「ペイント」

「ロボ兵」と整列!

宇宙服を着て歩く?走る!
「人体」を動かす で作成した「ROBOと歩こう?[ROBOfemale25Walk.skp]」を開いてください。
不要なものを削除します。
全レイヤ表示、全選択→選択部分解除→消去

「頭部」消去、「マテリアル」全てデフォルトに戻す

「カメラ[平衡投影]」→「シーンマネージャー」から全シーン、「カメラの位置」更新

「スタイル」から、「端点」を非表示にしています。
デザイン検討用ファイル「人体[Standing.skp]」から「Aki」の「頭部」を含む「宇宙服」と「補助線(位置合わせの基準線)」を[コピー]

「シーン4」に[貼り付け]→補助線の「端点」を基準に[移動]→定量(ここでは緑の軸上 1000mm)[移動]

図では説明の便宜上、[貼り付け]た「人体」を操作順に複数描いています。
「シーン1」から「肩」「腕」「回転軸」を選択→「補助線(位置合わせの基準線)」の「端点」をクリック→
「位置合わせの基準線」は「頭部グループ」内の「首」の上部先端(次図参照)から定量(緑の軸上
500mm)出ています。

右腕、右脚を「消去」しています。
→「人体」側の基準点(「首」の上部先端)をクリック(「端点 グループ内」と表示される)
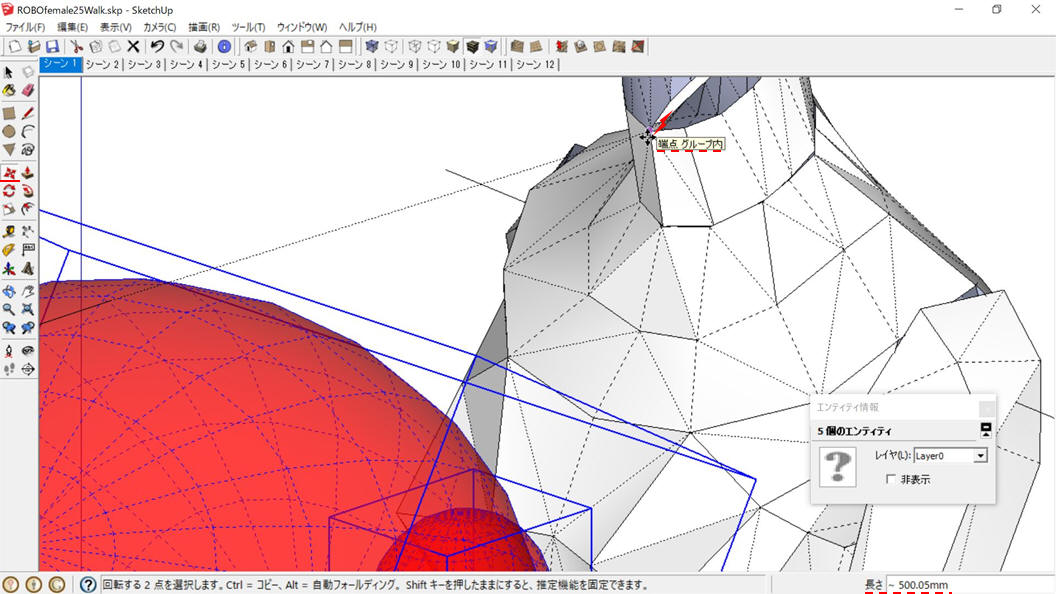
→続けて定量(緑の軸上 500mm)[移動]

「人体」の「肘」の曲げ(前出図参照)に合わせるため、同じ点から回転軸(赤い軸上)を引き出す
動きを付ける際、「肩」を回した後に「肘」を曲げ(回転:赤)たため、このような段取りが必要となっています。

レイヤを合わせています(全てのシーンで書き込みレイヤがLayer0となっているため)。

「人体」を動かす「歩く」での、各部のレイヤごとの回転角を下表にまとめました。
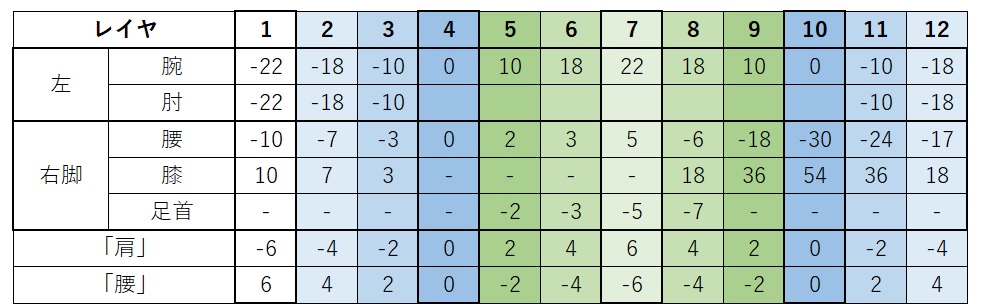
「宇宙服」もこの表に合わせて動きを付けながら、「人体」を覆うよう成形して行きます。
「腕」ごと「肩」を[回転 -6]

「腕」を[回転 -22]

「分度器(ポインタ)」で「回転軸(腕)」のエッジに沿って(端点〜エッジ上)ドラッグ→分度器:黒
「前腕」を[回転 -22]

「分度器(ポインタ)」で「回転軸(肘)」のエッジに沿って(端点〜エッジ上)ドラッグ→分度器:赤
はみ出している部分を見つけて(図はグローブ)、成形(ここでは[尺度]を使って)しましょう。

入力値を刻んで(操作中変更可)探っています。「腕」全体も「グループを編集」で[移動]などを使い、部分的な成形も行いました。
調整が済んだら元の位置に戻します。
「肘 回転 +22」、「腕 回転 +22」、「肩 回転 +6」→基準点間[移動(前出図参照)]、定量[移動(緑の軸上
500mm)]

上下動や「脚」以外の回転が無い「シーン4」に切り替えましょう。「走る」ときの「肘」を成形するためです。
「肘の回転軸(赤の軸上 200mm)」を描き加えてレイヤ4に移動、次に「腕」を定量[移動(緑の軸上 1000mm)]

レイヤ0の「グローブ」と「前腕」及び、レイヤ4の「腕」を交差選択→「肘の回転軸」で[回転]90°

はみ出し部を覆うよう[移動]
シーン1で調整済みなので「成形」は不要(のはず=^x^;=)です。但し、肘などで不具合がある場合は伸ばした時を考慮して
再調整してください。

図では、描き加えた補助線を頼りに三方向(赤緑青)に[移動(入力値を刻みながら)]しています。
「肘」を90°曲げた状態での成型が終わったら「female25AkiRun」と名前を付けて保存
各グループを元の位置に戻し、「female25AkiWalk」と名前を付けて保存、終了

「脚」は動きの大きい「追い越し![ROBOfemale25RUN.skp]」で「成形」しましょう。
不要なものを削除したうえで、「female25AkiRun」から「宇宙服」と「補助線」を[コピー/貼り付け]

同じ「レイヤ4」で作業しています。
上下動があるので、基準線の端点を「人体」側の基準点(「首」の上部先端)に合わせて[移動]

続けて定量[移動(緑の軸上 500mm)]

「グローブ」を「拳」に合わせて成形し(下図参照)、「腕」をグループ化して定量[移動(緑の軸上 1000mm)]

「female25AkiRun」の名前で上書き保存(更新)しています。
「脚」の「腰,膝の回転角」が大きいレイヤ1(前出表レイヤ7参照)で作業します。
基準線の端点を「人体」側の基準点(「首」の上部先端)に合わせて[移動]、続けて定量[移動(緑の軸上 500mm)]

「腰回り(4個のグループ)」を「回転軸(体幹)青」で[回転 6(表は右脚を示しているのでレイヤ1の値)]
「脚(3個のグループ)」を「回転軸(腰)黒(軸をドラッグ)」で[回転 30(レイヤ7の値)]
「脚(膝下 2個のグループ)」を同様に「膝」で[回転 60]
「人体」の「はみ出し」が無いよう、伸ばした時の具合も考慮しつつ「成形」を行います。

作業を終えたら、逆順の操作(膝回転→腰回転→腰回り回転→定量移動→基準点間移動)を行い元の位置に戻してください。
「足首」は、レイヤ8とレイヤ10(下図)で「成形」します。

成形を終えた「左腕、左脚」から、「右腕、右脚」を作成しましょう。上下動や「肩、腰」の回転が無い、レイヤ10で作業しています。
それぞれの回転軸の端点から、位置合わせの基準線を引く

「左腕、左脚」を移動、描き加えた補助線を含めてコピー
選択状態のまま「尺度」→ここでは「赤の尺度」でグリップを反対側へ「-1.00」押し込む

補助線の「端点」を基準に、個別に[移動]
「人体」は左右対称にはなっていません。このため図では、一旦よけて「推定機能(赤い軸上)」を回避しています。

定位置へ定量[移動]

「両脚」と「補助線」を[コピー]→「腕」の処理を終えた「female25AkiWalk.skp」に[貼り付け]、補助線を基準に定位置へ[移動]

Layer0から各シーン(レイヤ)にレイヤ間コピーして、「人体」の動きに合わせましよう。 「人体」を動かす 及び表(歩く、走る)参照
完成ファイルはコチラ↓
| female25AkiWalk.skp | female25AkiRun.skp |
 |
 |
所々はみ出していますが、ここでは修正しません。(=^x^;=)

| ロボ兵と歩こう? | 二人で追い越し! |
 |
 |
このページのサンプル動画をYouTubeにアップしています。
[戻る↑]
合志市栄のマイファブラボ SAKAEPC ものづくりサポートCAD講座 [目次へ] [←前へ][次へ→]