合志市栄のマイファブラボ SAKAEPC
ものづくりサポートCAD講座
駆動模型の設計
六足歩行アクリルロボット・・・足の動き(リンク機構)を検証
[進む↓]
「アクリルロボット(三角板リンク機構タイプ)
akurirurobo_8003A-6B」の「足」を共通部品としています。

「多足歩行アクリルロボット用足の標準化」ページの《共通仕様》を参照してください。
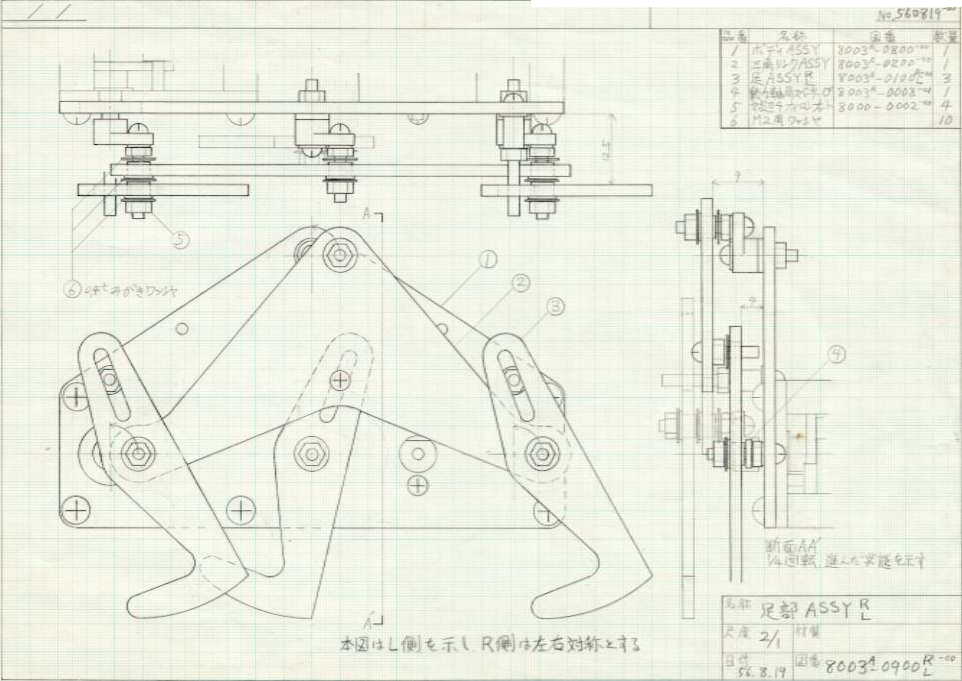
「足の動き詳細」
手書きの図面です。日付は…昭和!!
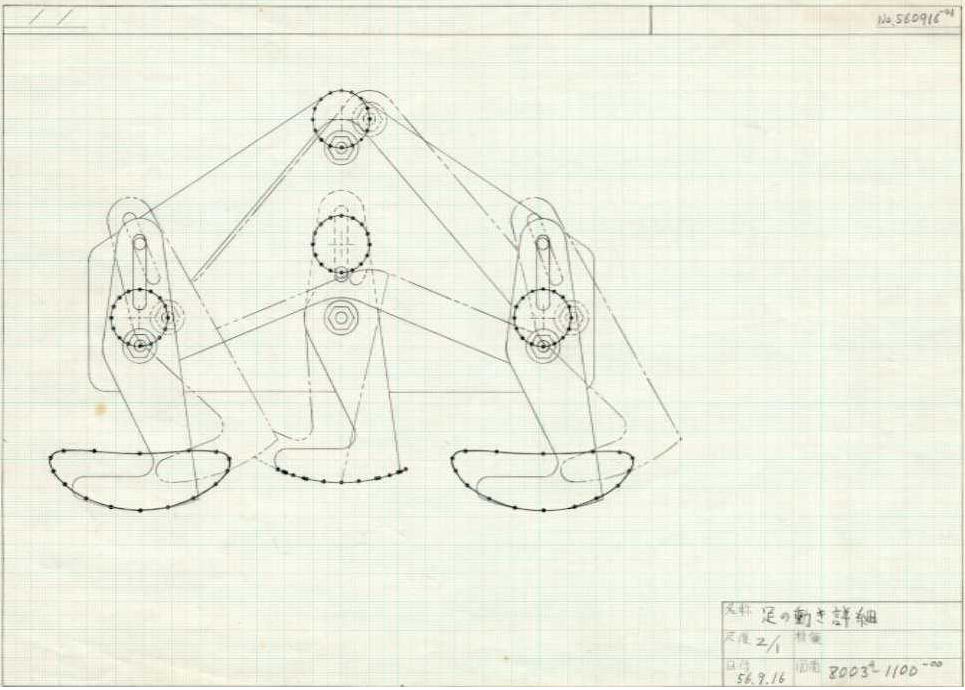
6本の脚は同じ構造で、中央の足は「三角リンク」を固定して見ると、他の足と同じ動きをしています。
「リンクシミュレータ」で同様の図を描いてみました。
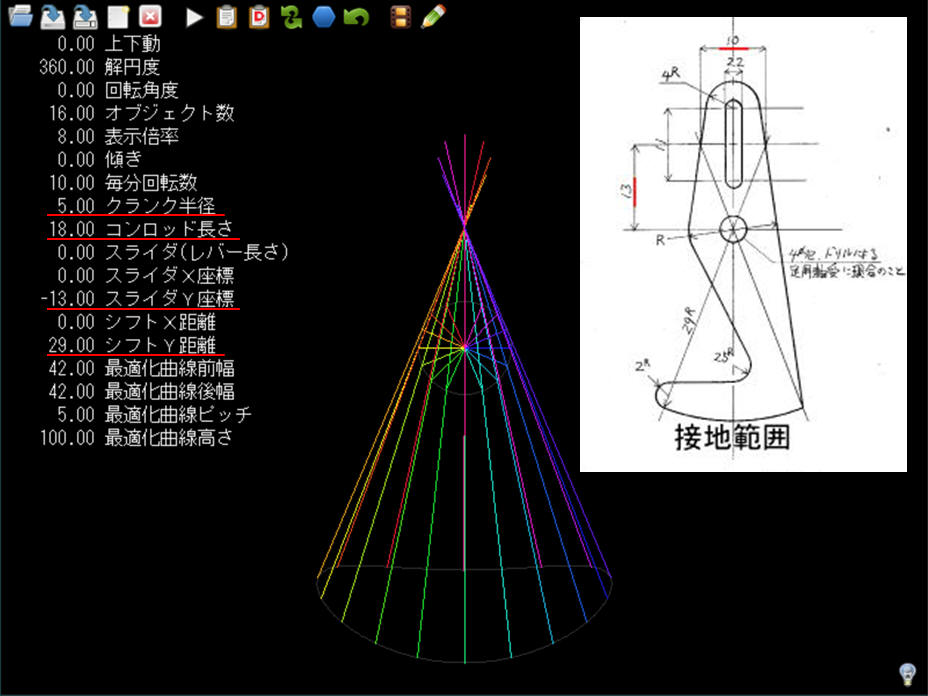
「かわロボ向け設計補助ソフト:Links」を使わせていただきました。
「解円度」で表示数を指定し、「毎分回転数」でスピードを変化させます。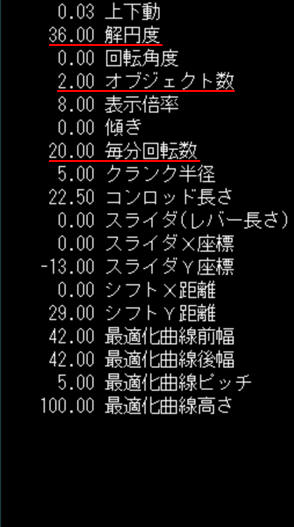  |
レバーの長さを0に設定すると アニメーションGIFを作成するための 「Linksの使い方」より 「GIFアニメ」にしています |
上の動きを参考に、SketchUp 8 で36シーン(10°毎)のアニメーションを作ってみました。
ここでは、「三角板リンク機構タイプ」の中央の足を、「三角リンク」を固定した状態で動かしています。
| 「8003A-0001-01.skp」+「8003A-0003-00.skp」 | [等角図][全体表示]、[表示]→[アニメーション]→[シーンを更新] |
 |
 |
| [8003A-0001_3migi.skp] | [8003A-0001_3toukaku.skp] |
複数のレイヤを使ってアニメーション作成
|
六足歩行アクリルロボット3号Aタイプ 右側面図(足の動き) |
等角図(全体表示) |
 |
 |
| [6s3_Aani-migi.skp] | [6s3_Aani-toukaku.zip] |
駆動側(中央)と従動側(前後)の「足の動き」が違います。全ての足を動かすよう、各シーン(クランク回転10°毎)を
レイヤごとに描き分けています。
補助線(マーカー)を2D_CADで描き、3DS出力しましょう。前ページで作成した「6s3_AB.jww」を開いてください。
「[0-9]Aタイプ駆動リンク板」を「書き込みレイヤ」にし、他の「レイヤの状態」を「レイヤバー」から図のようにします。
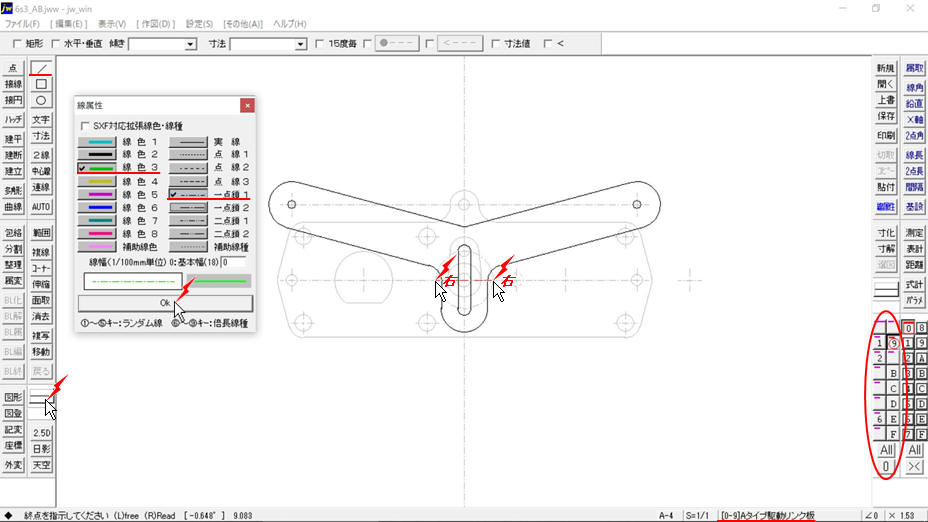
「線属性」を変更し、クランクの中心線を引く
連続回転複写
[範囲]:図の直線を選択→[複写]:回転角10入力、複写先の点を指示、[連続]ボタンを16回クリック
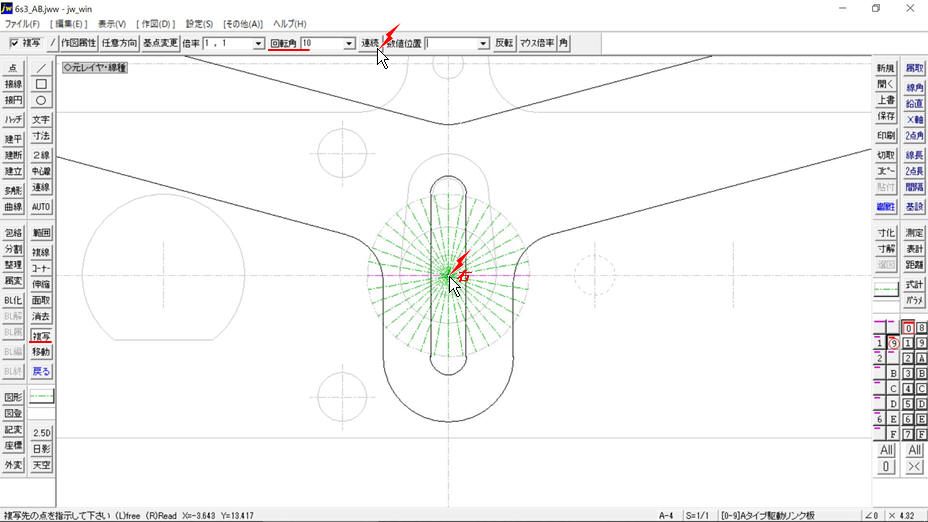
線が混んでいるので、十分に拡大して作業してください。ここでは「レイヤの状態」を変更せずに進めています。
図の直線(垂直時の足の中心線)を引き、クランクの回転に合わせて「連続(18ヶ所)複写」
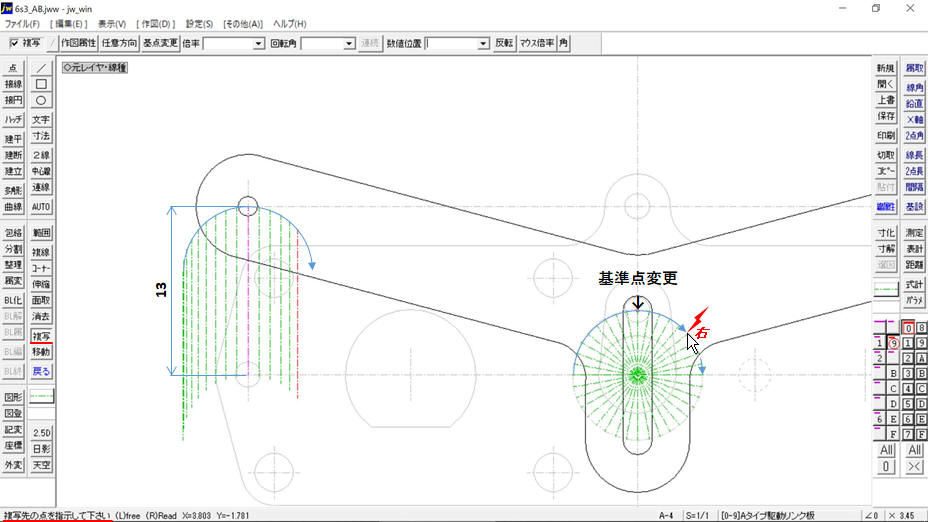
「リンク版」の穴の横移動を示しています。
「垂直時の足の中心線」を半径とする円を描き、「線[伸縮]」の「基準線」とする
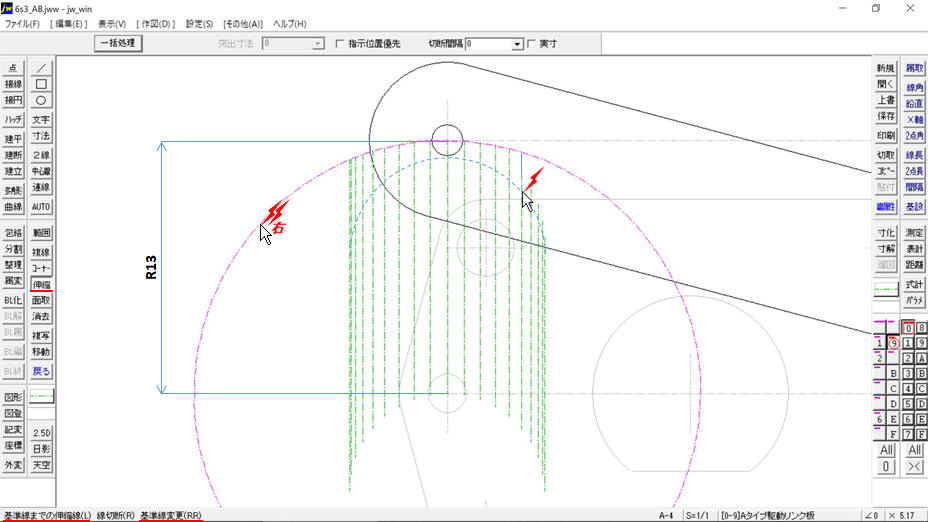
垂直線(18本)を円弧に合わせて[伸縮]しています。
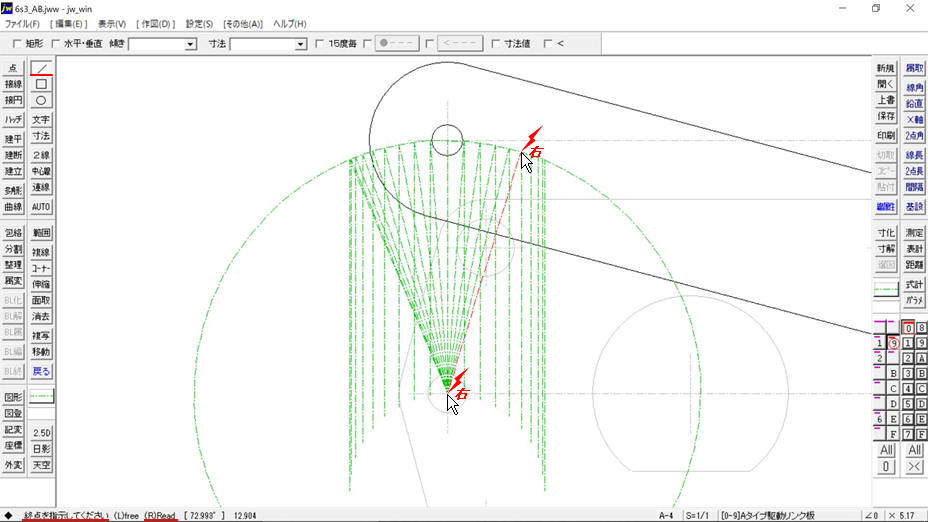
足の回転軸のセンターから、垂直線の「端点(図では円弧との「交点」)」に直線を引く
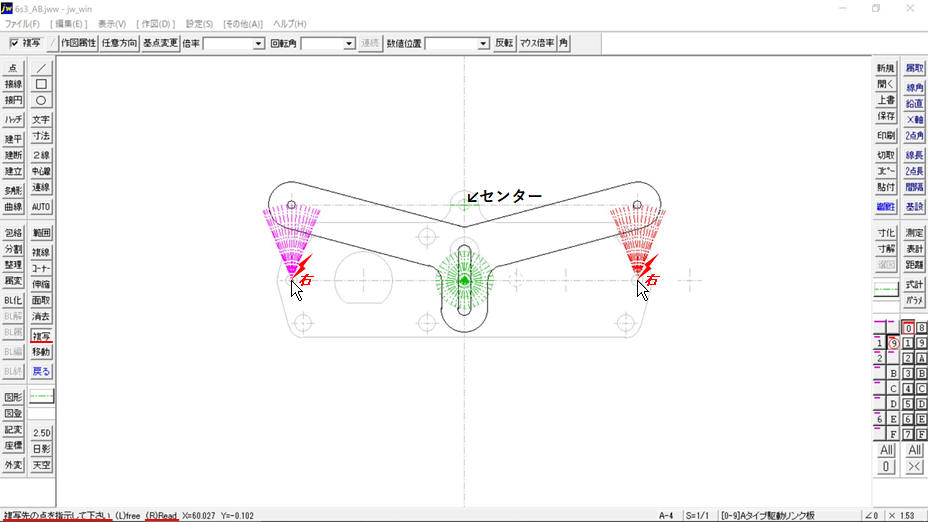
不要な線を[消去]、扇型(従動側の角度を示す)をもう一方に[複写]
駆動側の支点の中心線を描く
次ページで解説するBタイプも含め、アニメーション作成用として、「6s3_ABani.jww」と名前を付けて保存しています。
3DSデータの出力
描き加えた中心線(線色3)のみコピーして、新しいファイルに貼り付けます。
「範囲」[全選択]→[<属性選択>]から「線色3」を指定(選択)→[コピー]
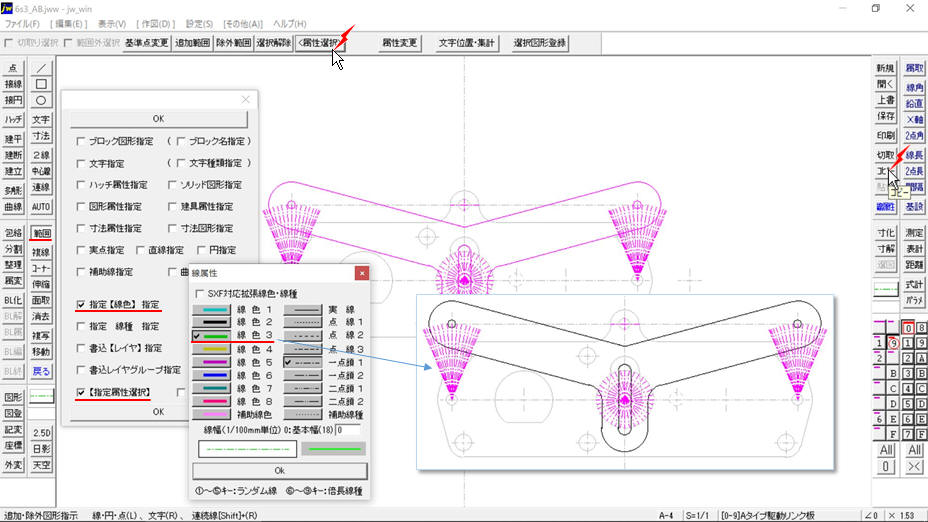
「新規作成」→「貼り付け」
同じ名前のdxfファイルとして保存し、3DSデータを同時出力しましょう。
3DSデータのインポート
SketchUp 8 を起動→保存した3DSファイルを「インポート」
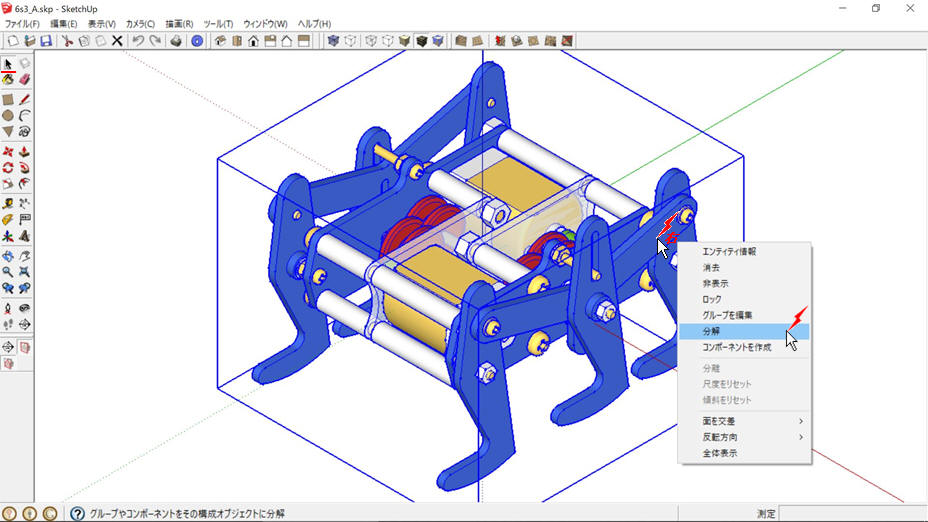
前ページで作成したSketchUp モデル「Aタイプ検討用組立図6s3_A.skp(圧縮ファイル6s3_A.zipとして保存)」を開いてください。
一つのグループになっているので「分解」します。
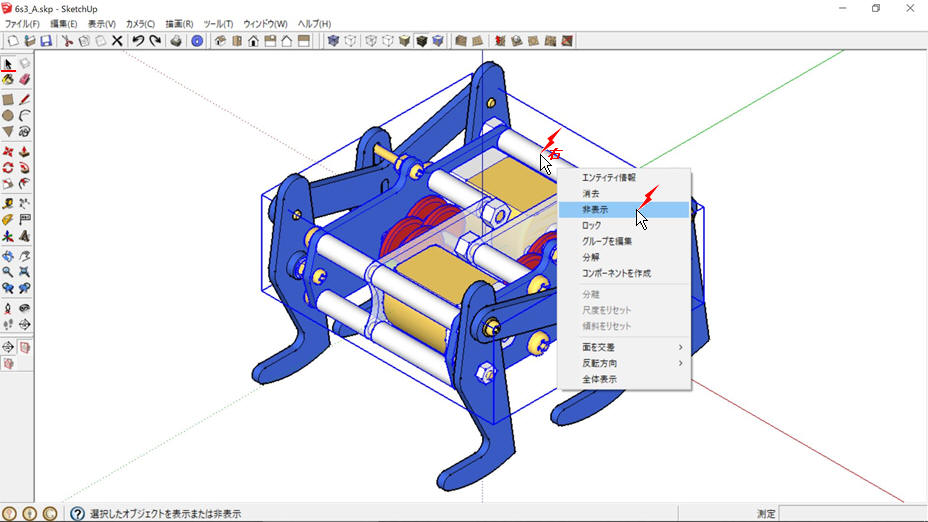
胴体(動力ユニット)部を非表示にしておきます。
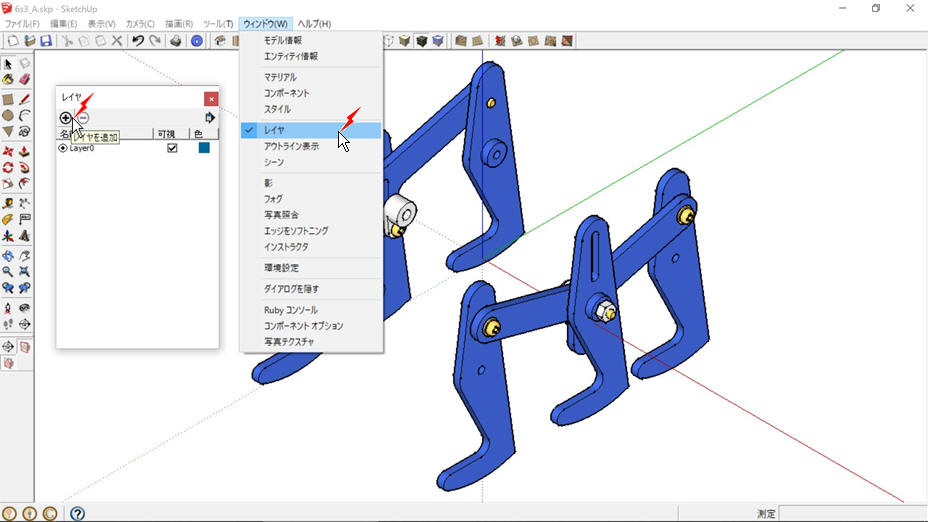
■ レイヤを追加
[ウインドウ]→[レイヤ]→[レイヤを追加]
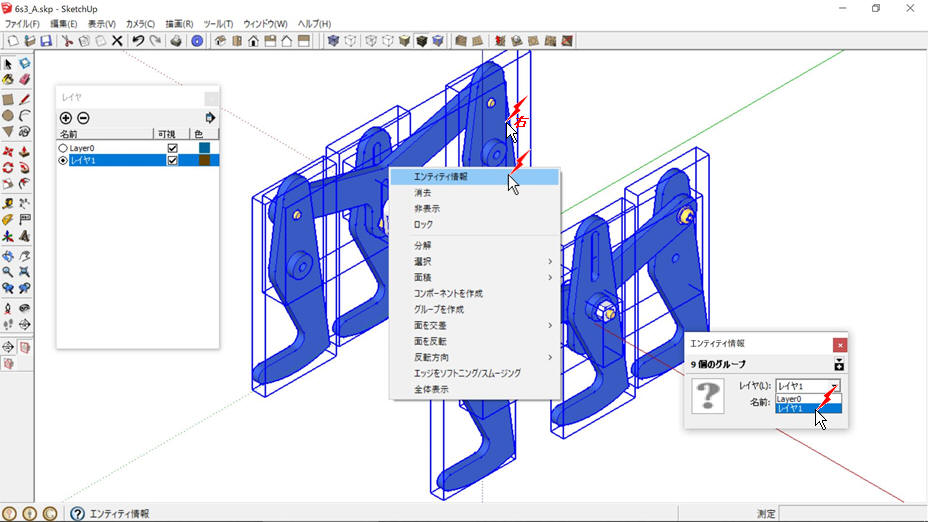
■ レイヤ間移動
選択([Ctrl]+[A]:全選択)、対象の上で右クリック→[エンティティ情報]→移動先の「レイヤ名」をクリック
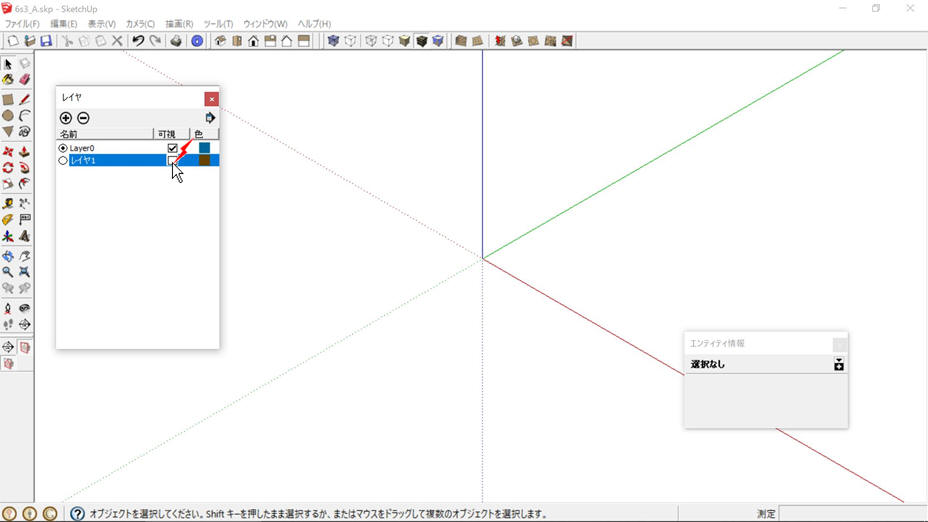
レイヤ[可視(ON/OFF)]
レイヤ1[可視OFF]→全て非表示
現在の書込みレイヤ「Layer0」に「補助線」を[コピー][貼り付け]
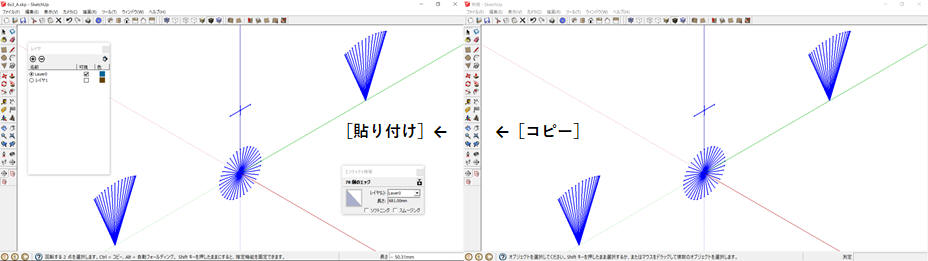
■ レイヤ間コピー
同一レイヤ内にコピーして、「レイヤ間移動」を行っています。
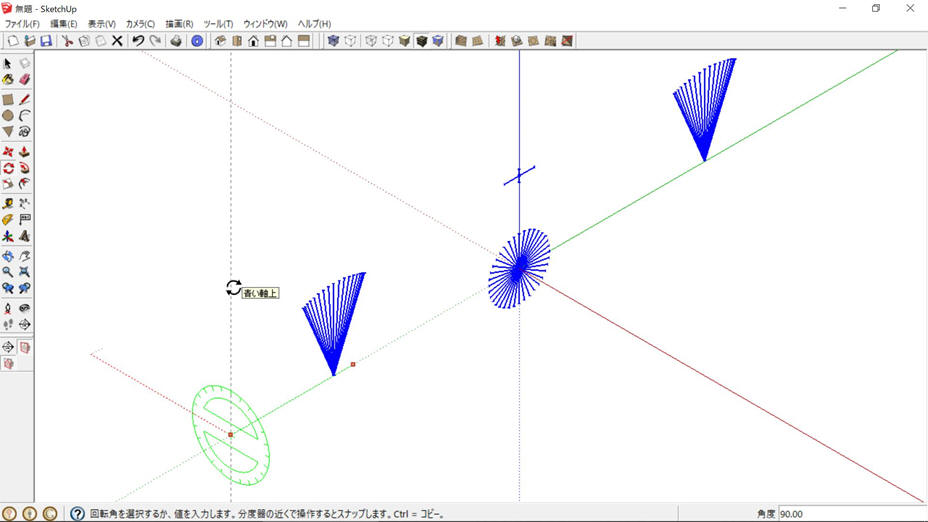
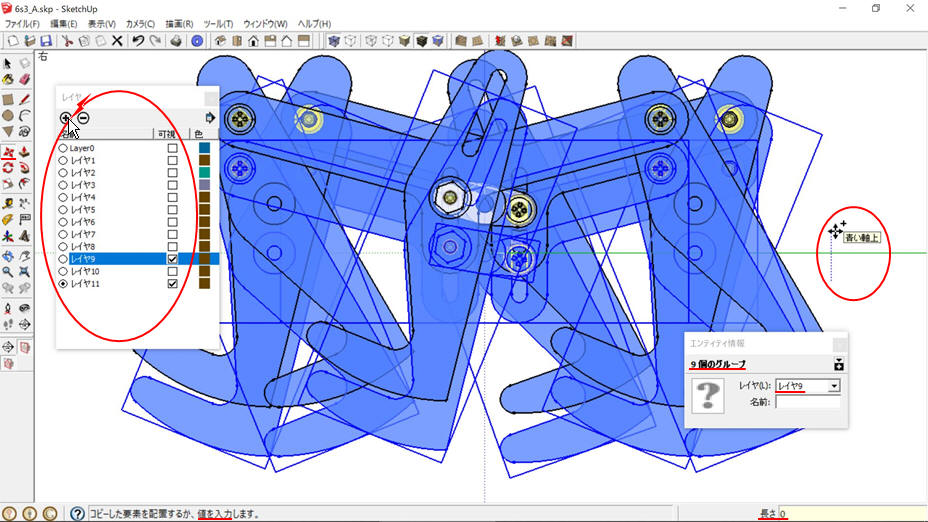
「レイヤ2」を[追加]、「レイヤ1」を書込みレイヤにして「Layer0」非表示
「レイヤ1」全選択(9個のグループ)、[移動]+[Ctrl(コピー)]→移動(図では「赤い軸上」)→「長さ[0]」を入力
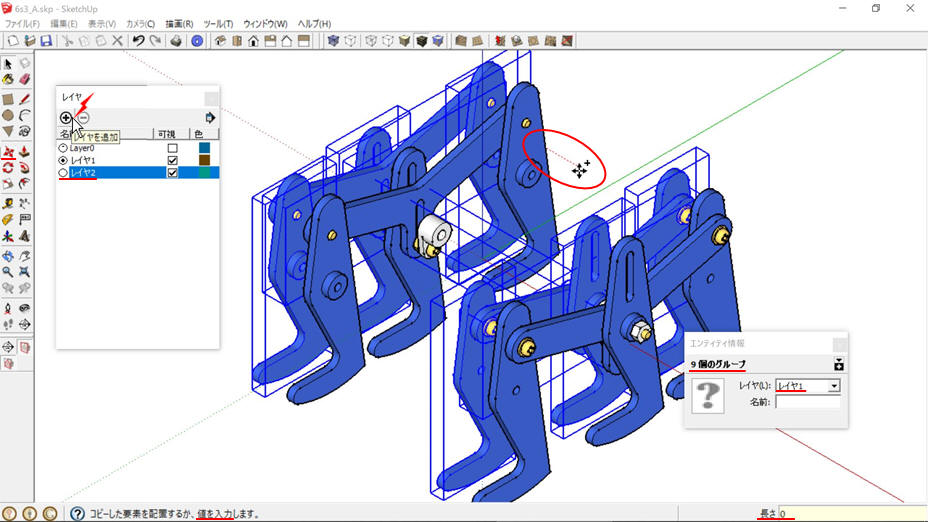
同一レイヤの同じ位置にコピーされました。
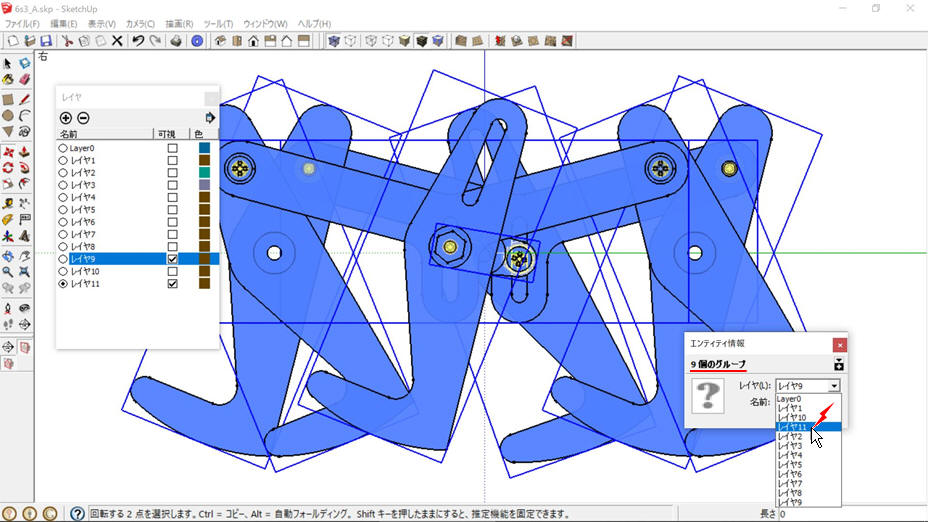
コピーされた図形が選択されています。「レイヤ間移動」しましょう。
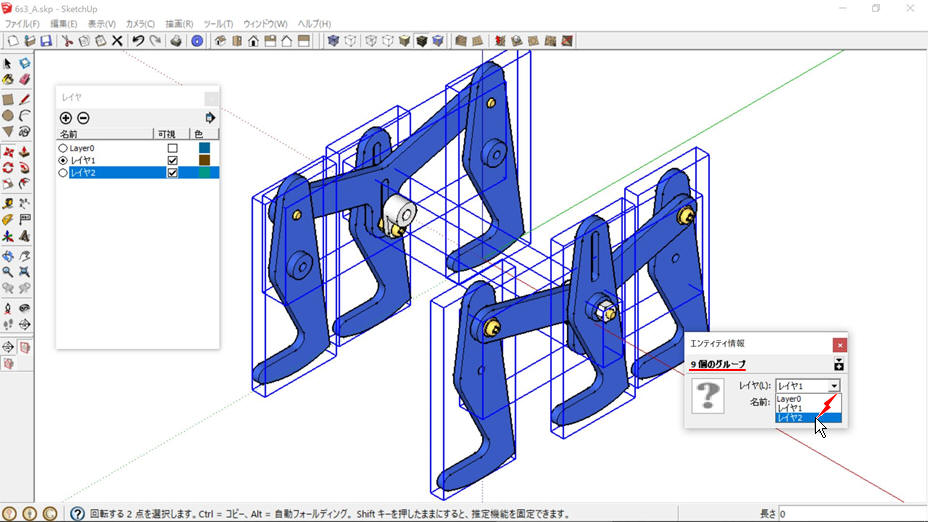
「エンティティ情報」→[レイヤ2]をクリック
先に「書込みレイヤ」を切り替えておくと、コピーと移動が同時に(レイヤ間コピーが)行えます。[参照図→記事はコチラ]
2020年7月追記
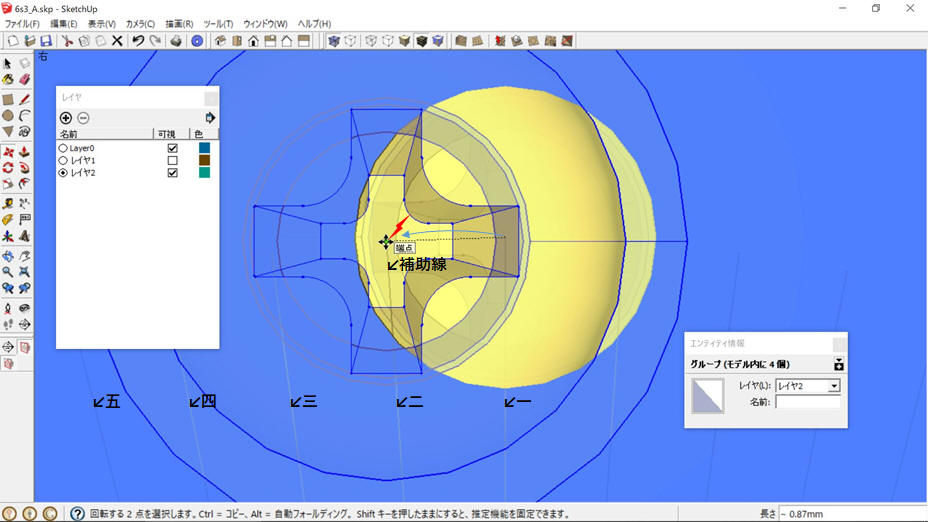
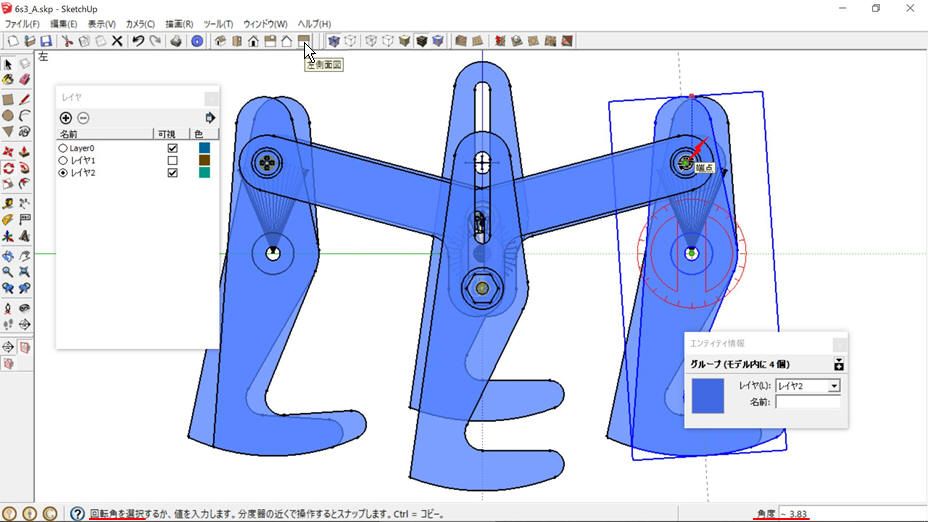
「レイヤ2」を「書込みレイヤ」とし、「Layer0」表示、「レイヤ1」非表示とする
「右側面図」,「X線」表示にし、「Layer0」の「補助線」が透けて見えるようにします。
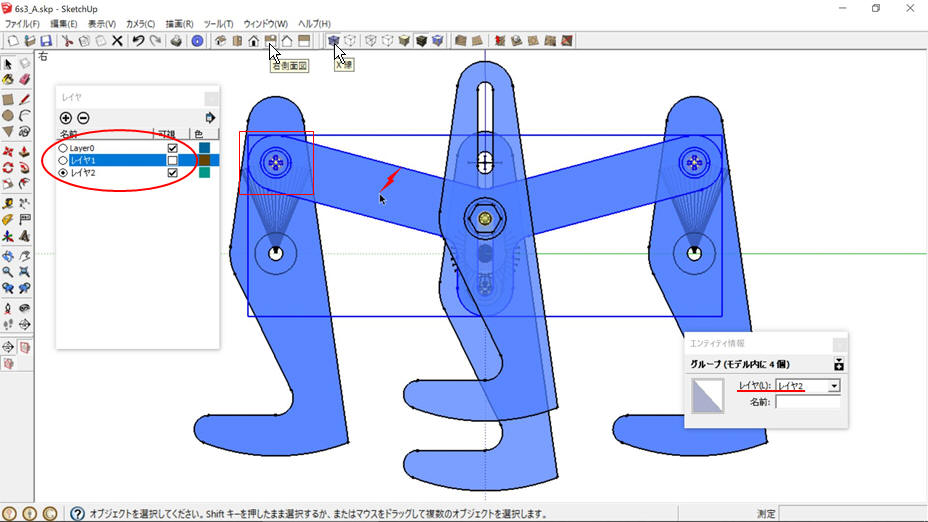
図では、手前の「駆動リンク板」を選択しています。
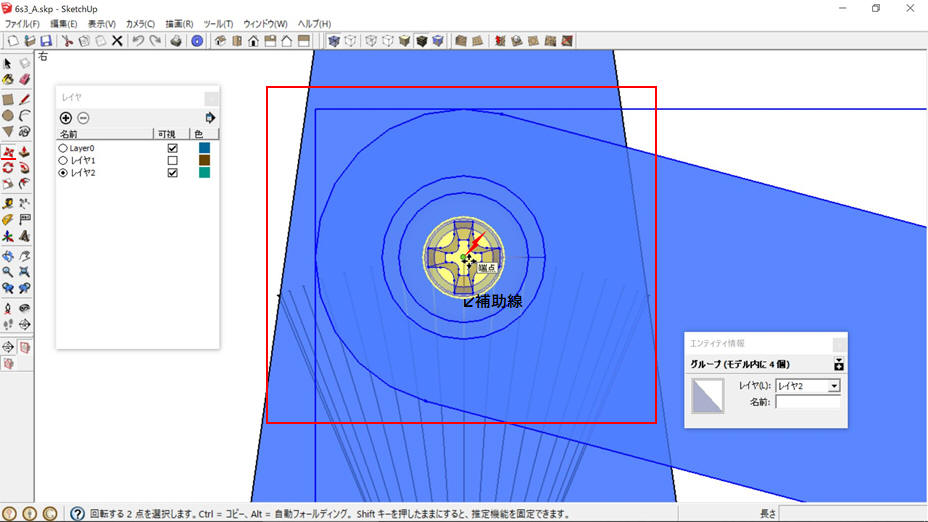
「補助線」の「端点」を基準に操作し、各部品を順次「移動」,「回転」しましょう。画面を十分に拡大して、「補助線」を確認してください。
■ 移動
一番目の位置を示す「端点」をクリック→
→二番目の位置を示す「端点」をクリック
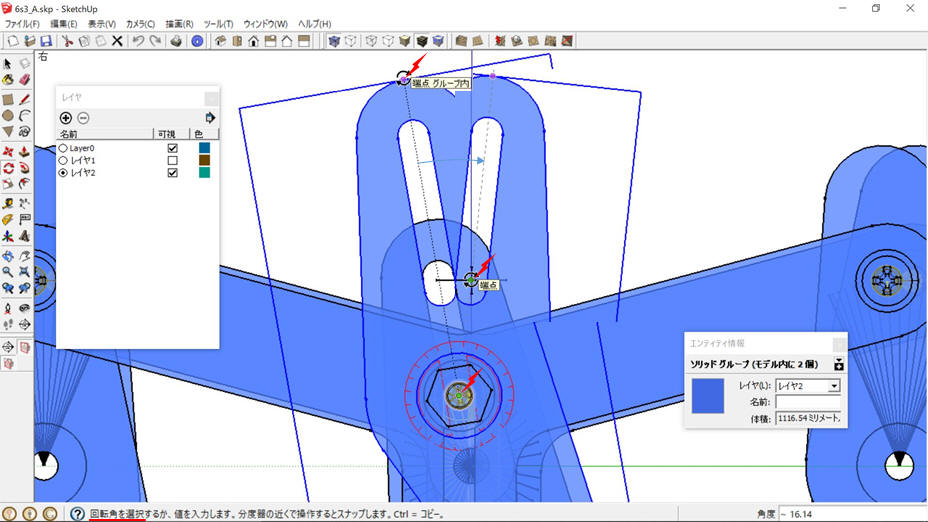
■ 回転
手前の従動側前足を選択しています。
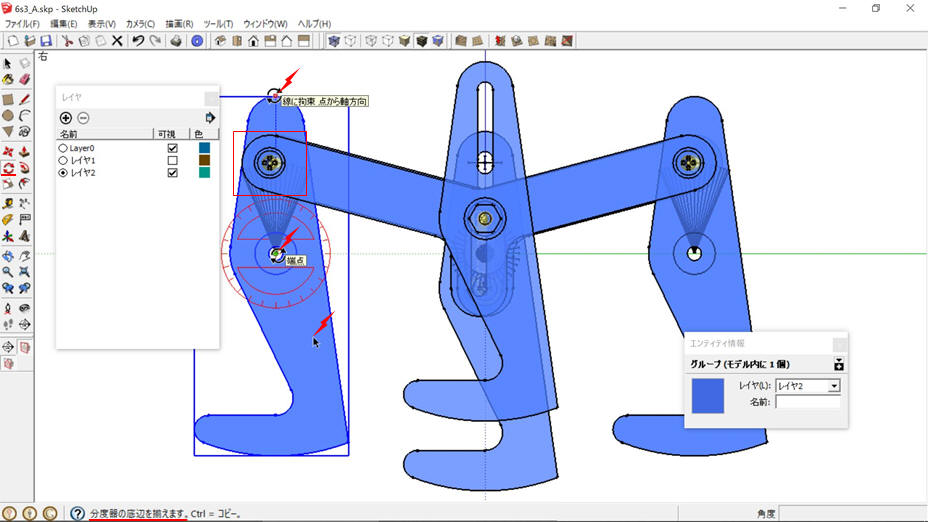
「端点(軸センター)」をクリック→「端点(足のセンターライン上)」をクリック→
→二番目の位置を示す「端点」をクリック
後足も同様に「回転」
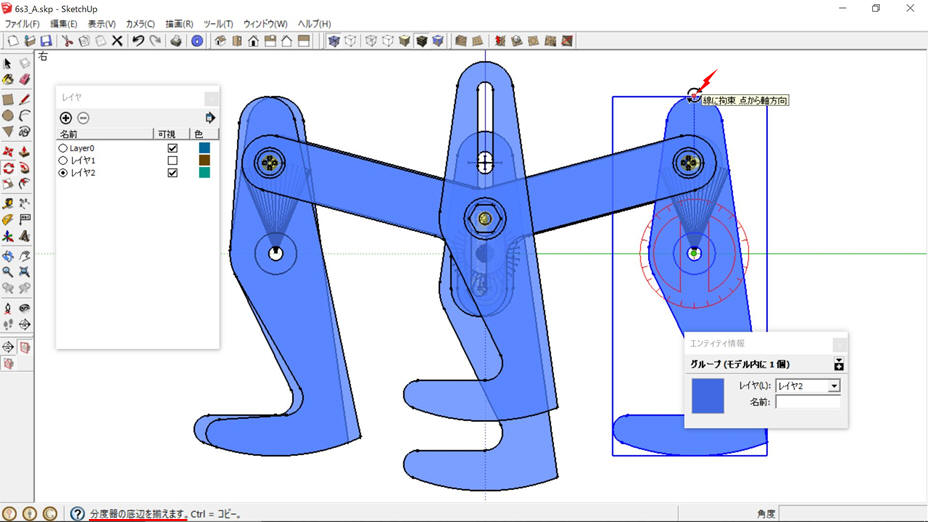
「左側面図」表示にし、手前の「駆動リンク板[移動]」,「前後足[回転]」(いずれも方向変わらず)を行います。
■ 回転
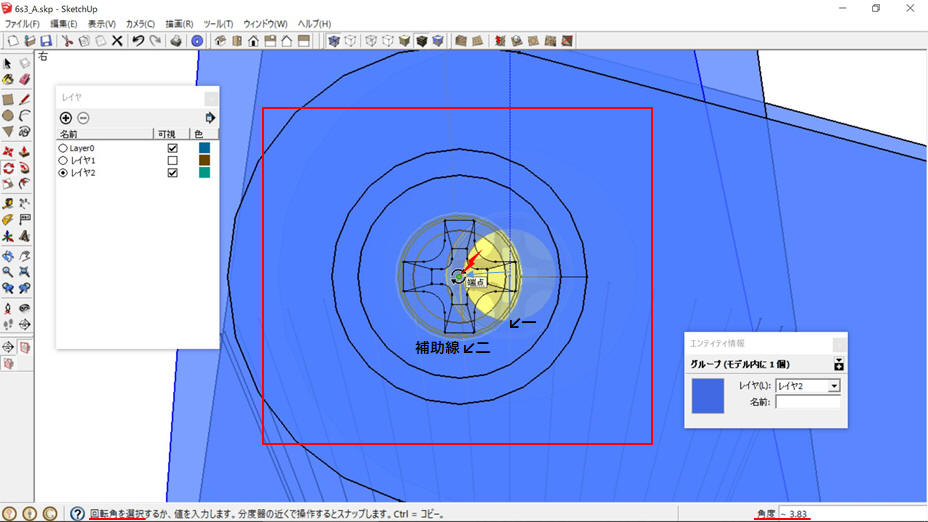
「右側面図」表示にして、クランクと中央足(左右)を選択しています。
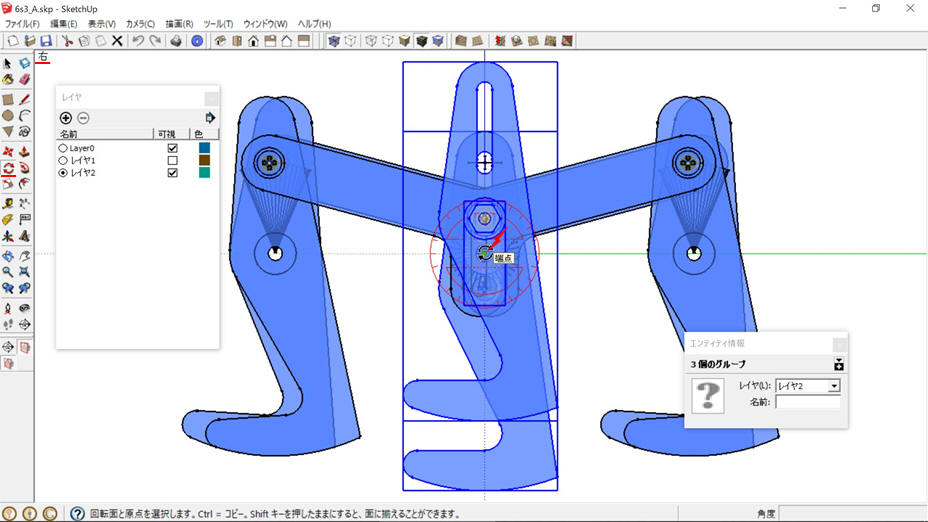
「端点(回転軸センター)」をクリック→
→一番目の位置を示す「端点」をクリック→二番目の位置を示す「端点」をクリック(回転角~10°)
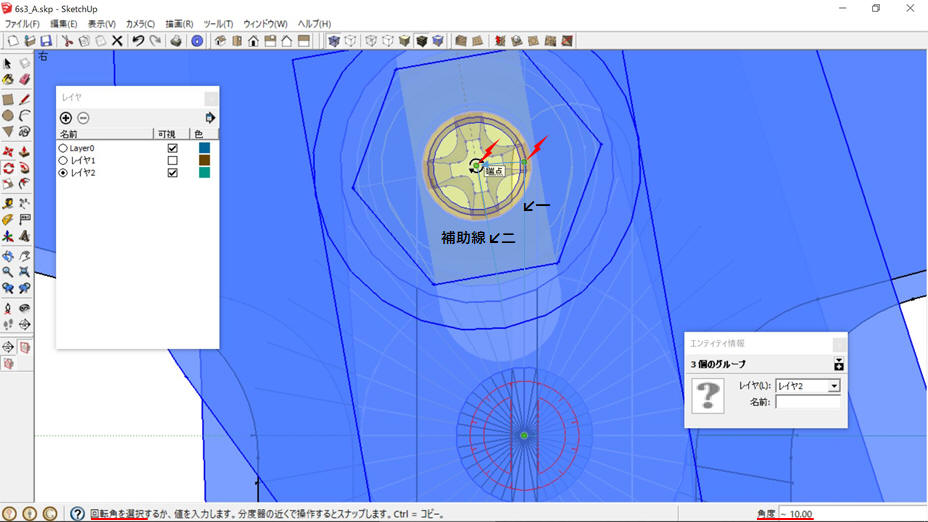
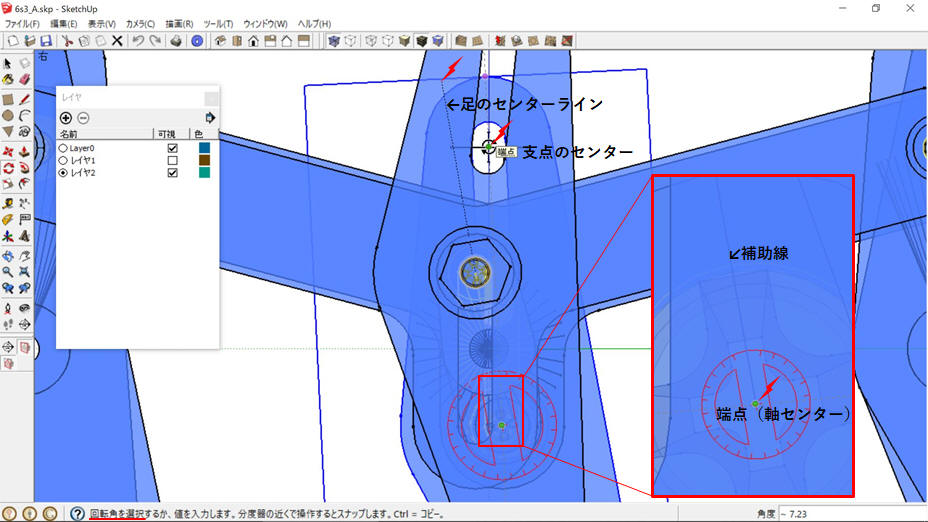
クランクの回転に伴い中央足(左右)が移動しました。「回転」して、長穴をスライド機構の「支点」に合わせましょう。
図では、手前の足を選択しています。
「端点(軸センター)」をクリック→「端点(足のセンターライン上)」をクリック→支点のセンター「端点」をクリック
奥の足も同様に「支点」に合わせます。
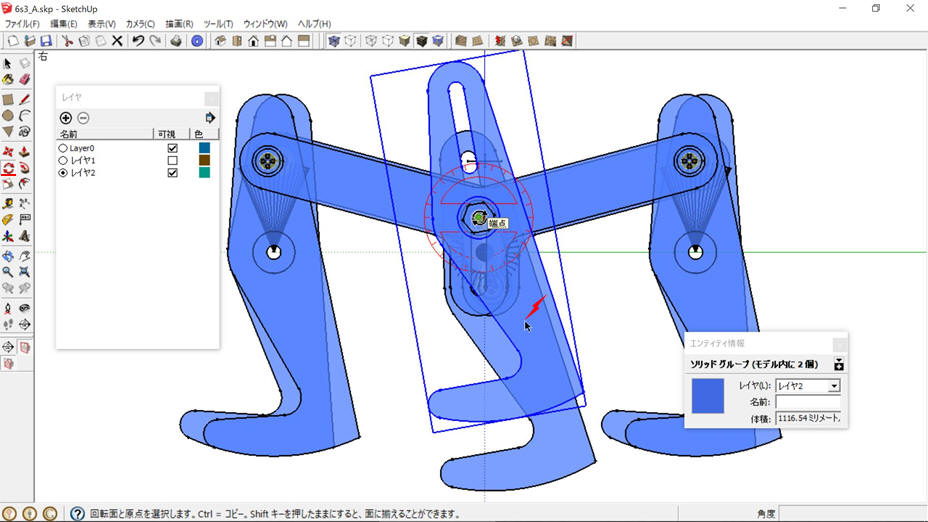
「レイヤ2」を描き終えました。以降、レイヤ36まで同様の作業を続けます。
「レイヤ3」を[追加]
「Layer0」非表示、「Layer2」全選択(9個のグループ)、[移動]+[Ctrl(コピー)]→移動(図では「青い軸上」)→「長さ[0]」を入力
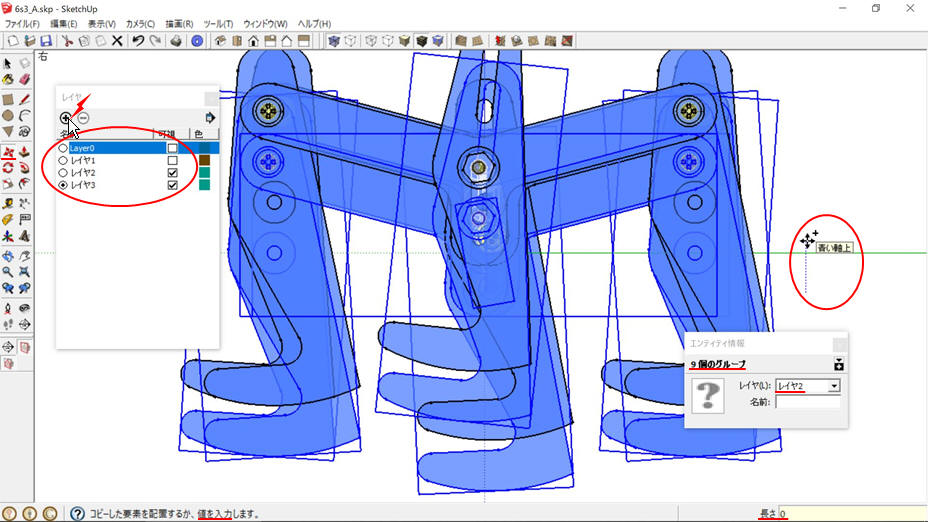
同一レイヤの同じ位置にコピーされました。
コピーされた図形が選択されています。
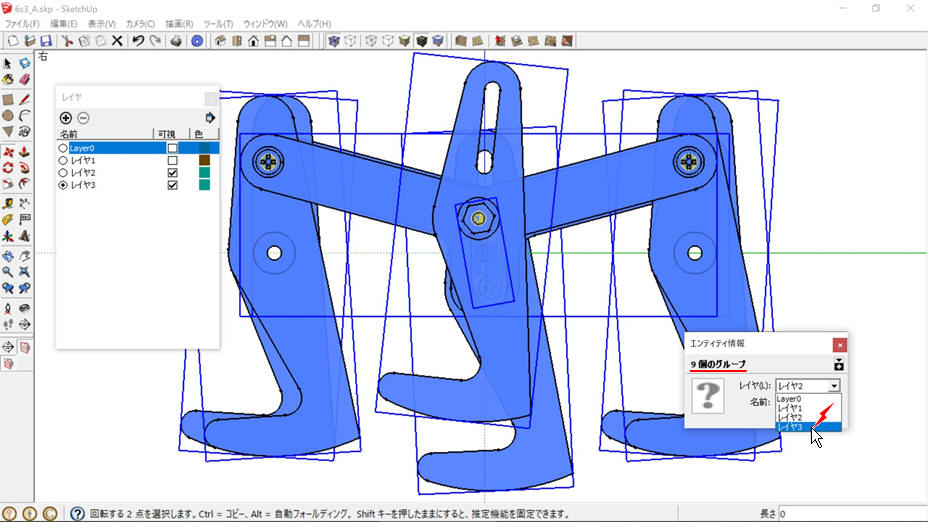
「エンティティ情報」→[レイヤ3]をクリック
追加したレイヤに移動しました。「書込みレイヤ」にし、補助線が描かれた「Layer0」を表示して作業を進めます。
「レイヤ10」まで描き終えました。
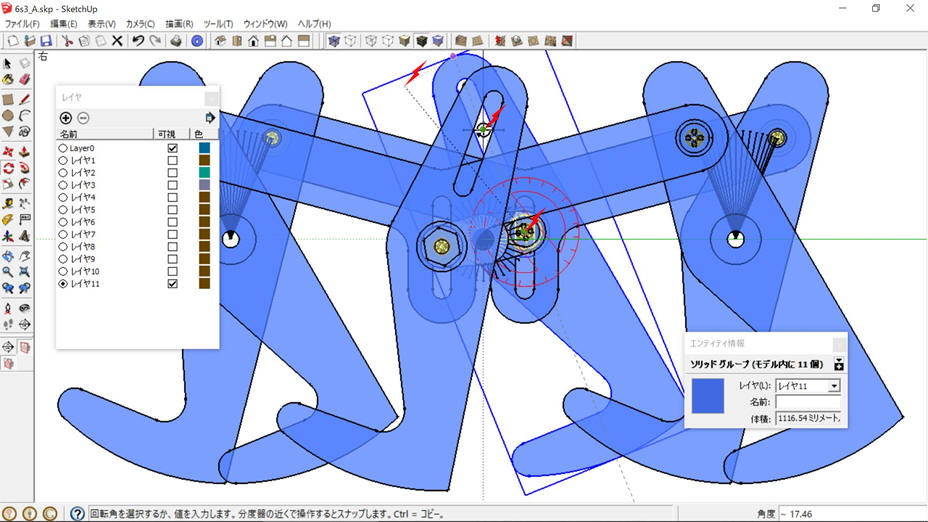
「レイヤ11」を[追加]し「書込みレイヤ」とする→「レイヤ10」非表示
「駆動リンク板」と「従動側足」の動きは往復運動です(「レイヤ11」では描き終えた「レイヤ9」と同位置、対応表を書いておくと便利)。
「Layer0」非表示、「Layer9」表示して全選択(9個のグループ)、[移動]+[Ctrl(コピー)]→移動(図では「青い軸上」)→「長さ[0]」を入力
同一レイヤの同じ位置にコピーされました。
コピーされた図形が選択されています。
「エンティティ情報」→[レイヤ11]をクリック
「レイヤ11」を「書込みレイヤ」とし、「Layer0」表示、「レイヤ9」非表示とする
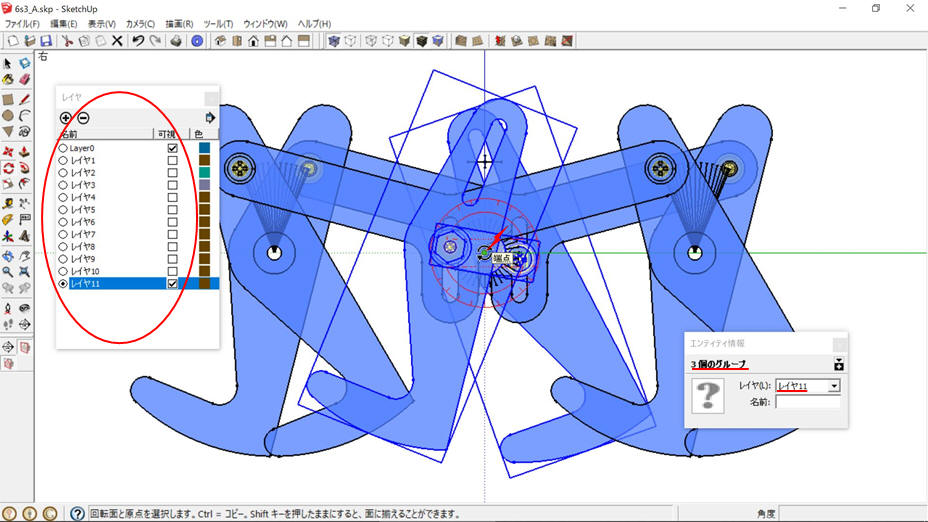
クランクと中央足(左右)を選択→[回転]→「端点(回転軸センター)」をクリック→
→九番目の位置を示す「端点」をクリック→十一番目の位置を示す「端点」をクリック
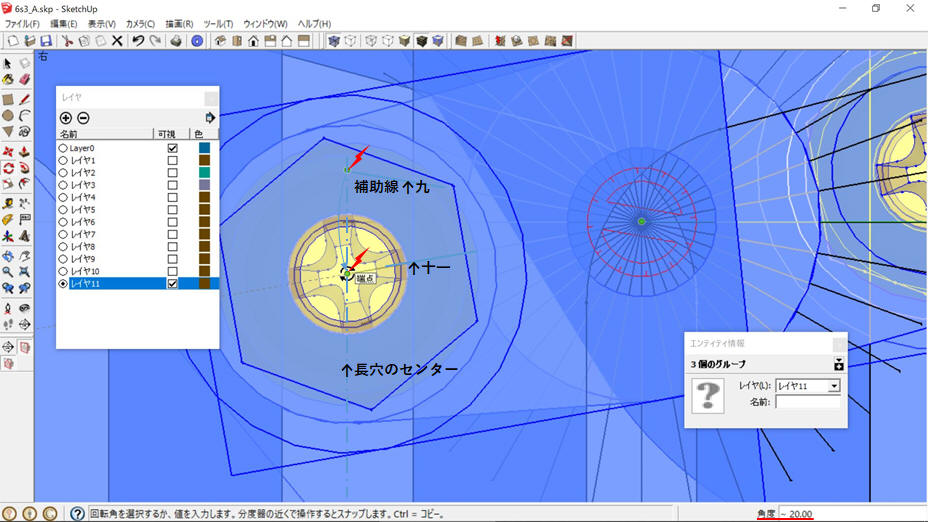
表示される「角度(ここでは~20°)」にも注目してください。
中央足(左右)を「回転」
図では、奥の足の長穴をスライド機構の「支点」に合わせています。
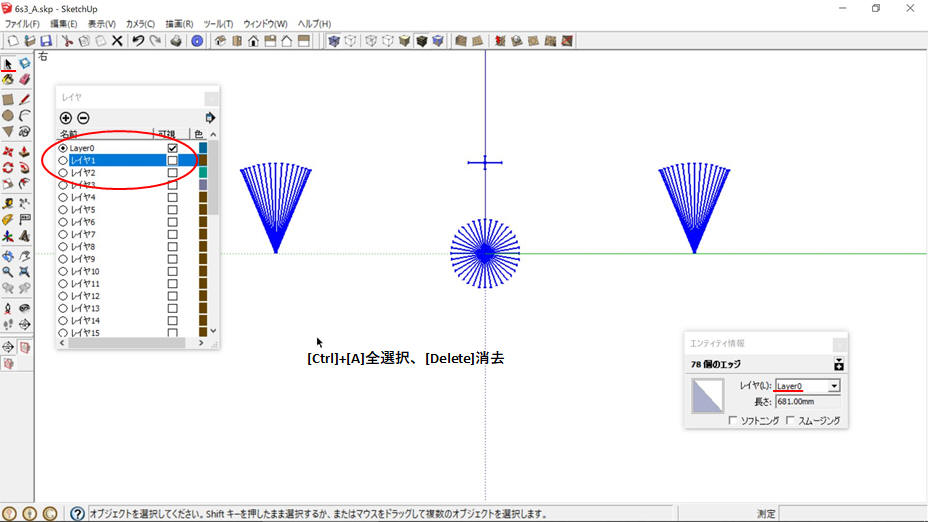
作業を繰り返し、「レイヤ36」まで描き終えました。不要となった「補助線」を削除します。
「Layer0(書込みレイヤ)」のみ表示、全消去
アニメーションにするために、レイヤ順に表示する「シーン」を作成します。
■ シーンを追加
「Layer0(書込みレイヤ)」表示のまま「レイヤ1」を表示、[全体表示]をクリック、[表示]→[アニメーション]→[シーンを追加]
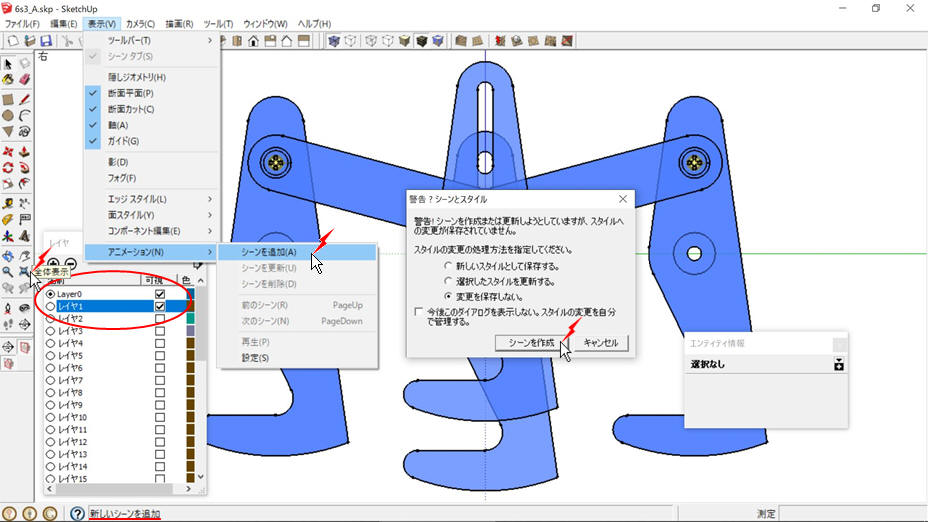
「シーン1」が作成されました。[全体表示]は以降は行わず、表示サイズが変わってしまった場合は「シーン1」に戻ってください。
「新しいシーンを追加」
「Layer0(書込みレイヤ)」と「レイヤ2」を表示→「シーン2」を作成
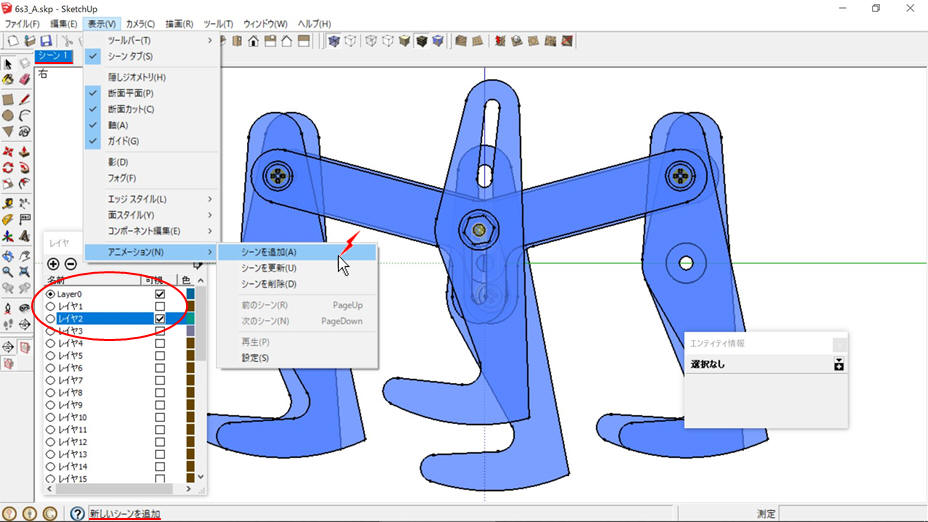
同様の手順で「シーン3,4,…,36」を作成
■ アニメーション設定
[表示]→[アニメーション]→[設定]
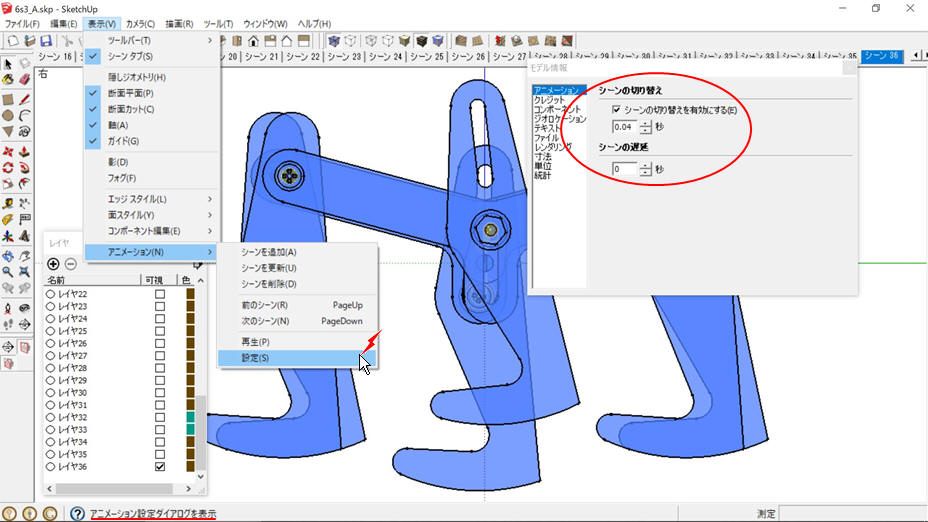
図のように[設定]して、「6s3_Aani-migi.skp」及び「6s3_Aani-toukaku.skp」と「名前を付けて保存」しています。
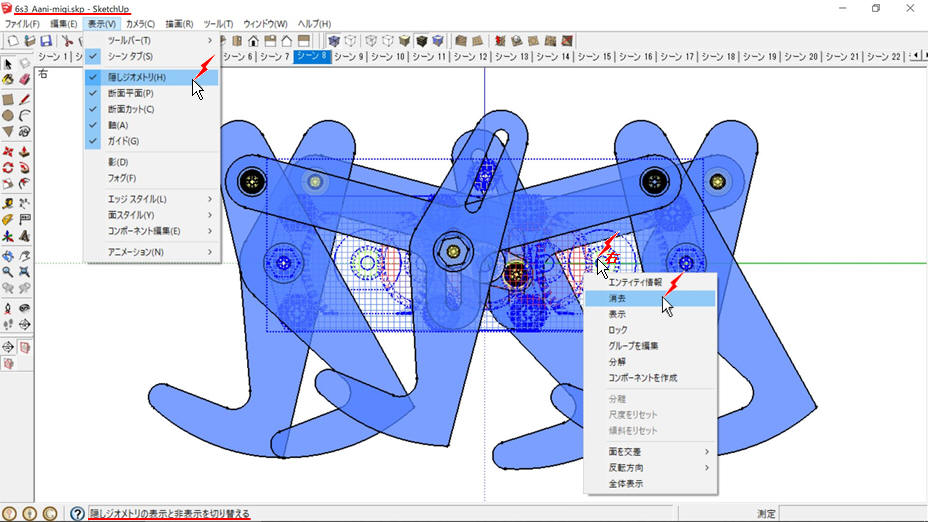
右側面図(足の動き)を表すアニメーション「6s3_Aani-migi.skp」を完成させましょう。
[表示]→[隠しジオメトリ(表示)]、不要な部分を消去
[モデル情報]→「統計[不要アイテムを完全に削除],[問題を修正]」
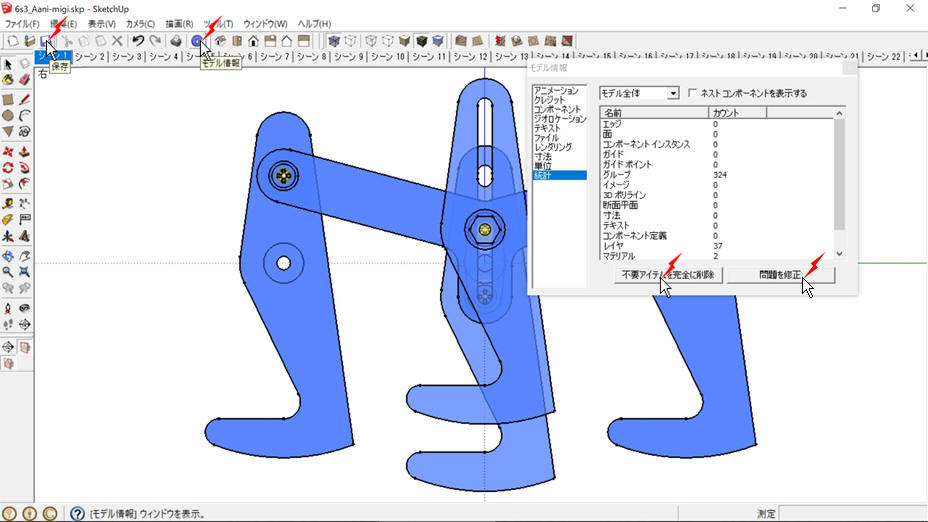
上書き「保存」→「6s3_Aani-migi.skp」
等角図(全体表示)を表すアニメーション「6s3_Aani-toukaku.skp」を完成させましょう。「シーン1」を表示しています。
「X線表示」中止、「隠しジオメトリ」表示、非表示にしていた胴体(動力ユニット)部を[表示]
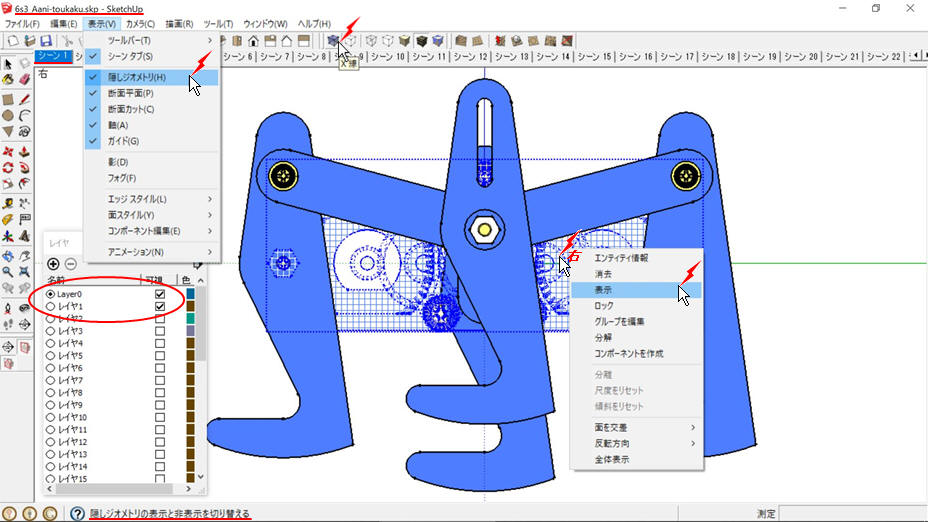
「隠しジオメトリ」を非表示にしましょう。
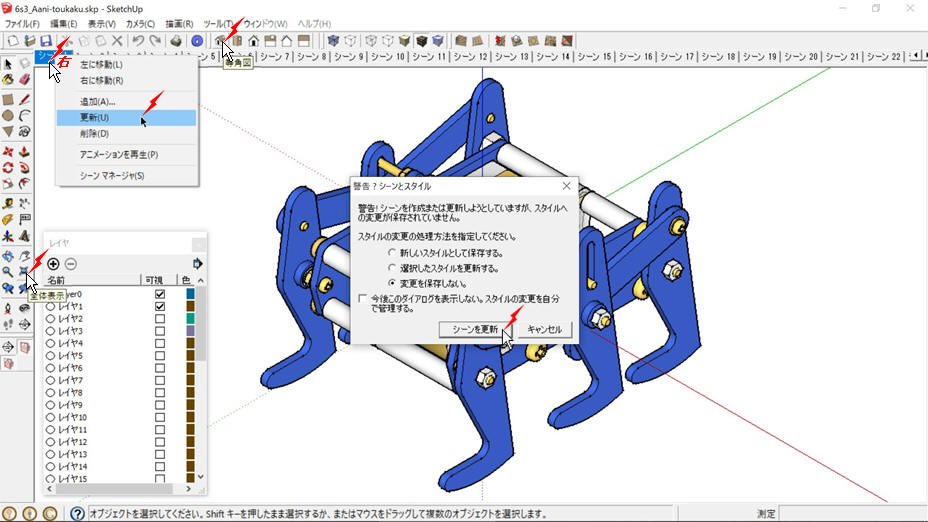
■ シーンを更新
「等角図」、「全体表示」にします。
「シーン タブ[シーン1]」の上で右クリック→[更新]→[シーンを更新]
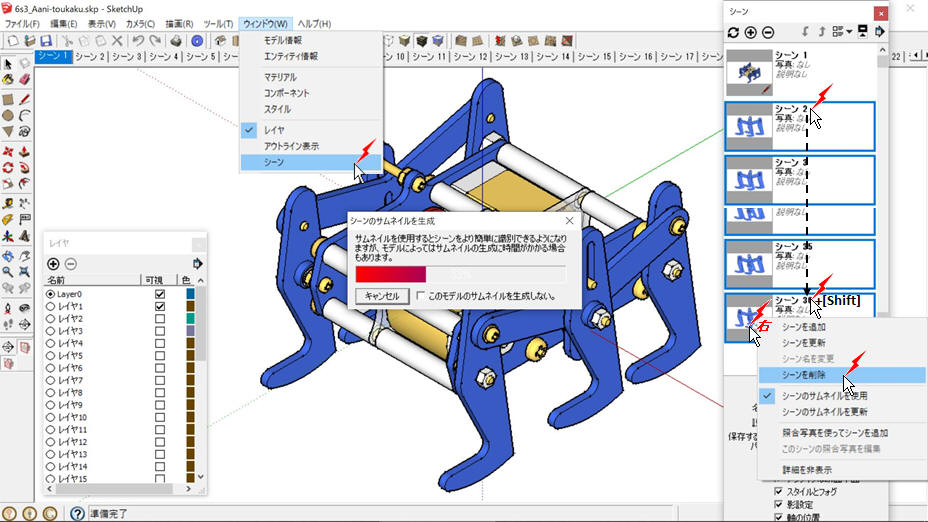
■ シーンを削除
[ウィンドウ]→[シーン]→「シーン ウィンドウ」から、 「シーン2」~「シーン36」を一度に[削除]しています。
■ シーンを追加
「Layer0(書込みレイヤ)」と「レイヤ2」を表示、[表示]→[アニメーション]→[シーンを追加]で「シーン2」を作成
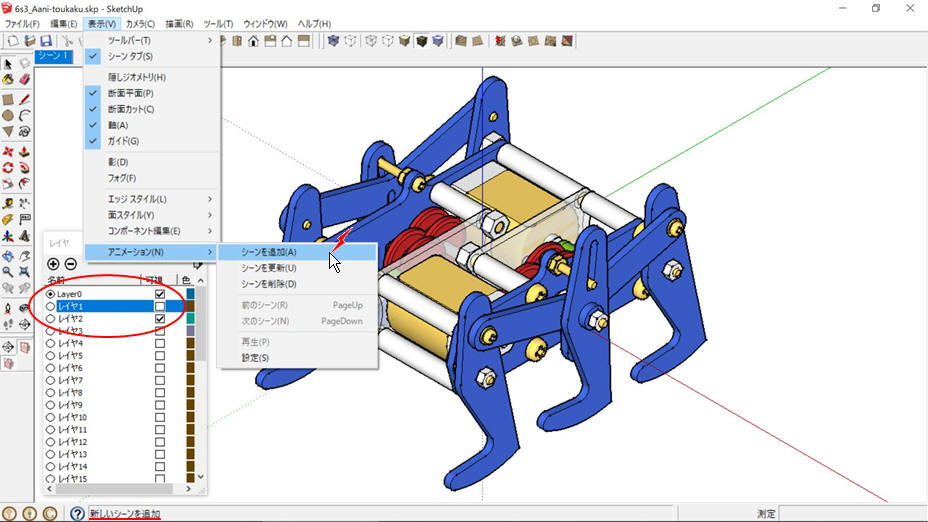
同様の手順で「シーン3,4,…,36」を作成
図では、「アニメーション」の「設定」を確認しています。
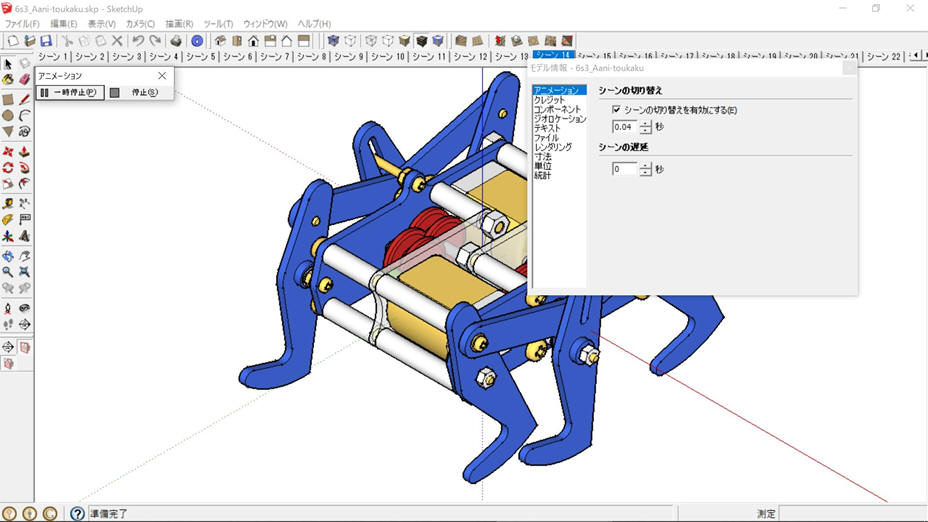
上書き「保存」→[6s3_Aani-toukaku.zip]
[戻る↑]
合志市栄のマイファブラボ SAKAEPC ものづくりサポートCAD講座 [目次へ] [←前へ][次へ→]