合志市栄のマイファブラボ SAKAEPC
ものづくりサポートCAD講座
駆動模型の設計
アクリルロボット2種・・・3D空間上で部品をレイアウト
[進む↓]
このサイトで紹介しているアクリルロボットのうち、この二種類は実際に制作していません。
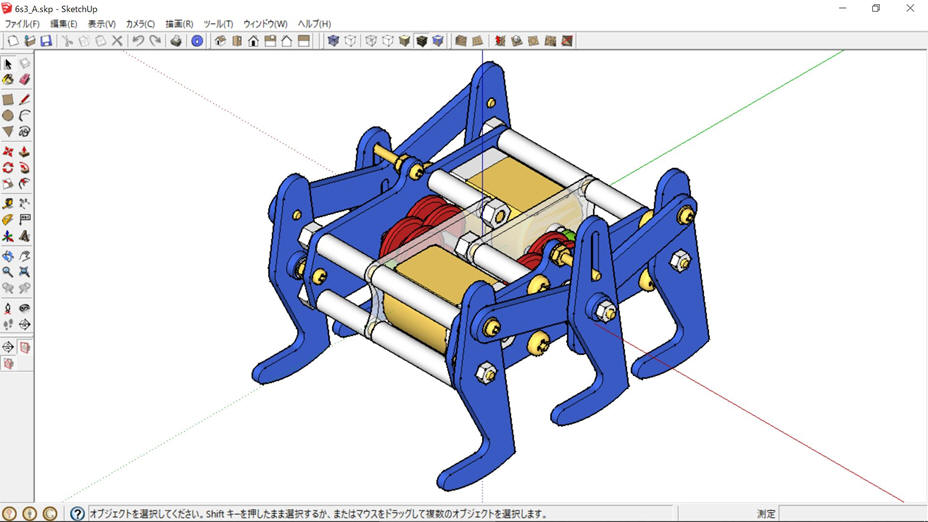
ロボットの胴体として汎用動力ユニット「GBm13x2.skp」を開き、共通部品の足「8003A-0001-01.skp」を「貼付」
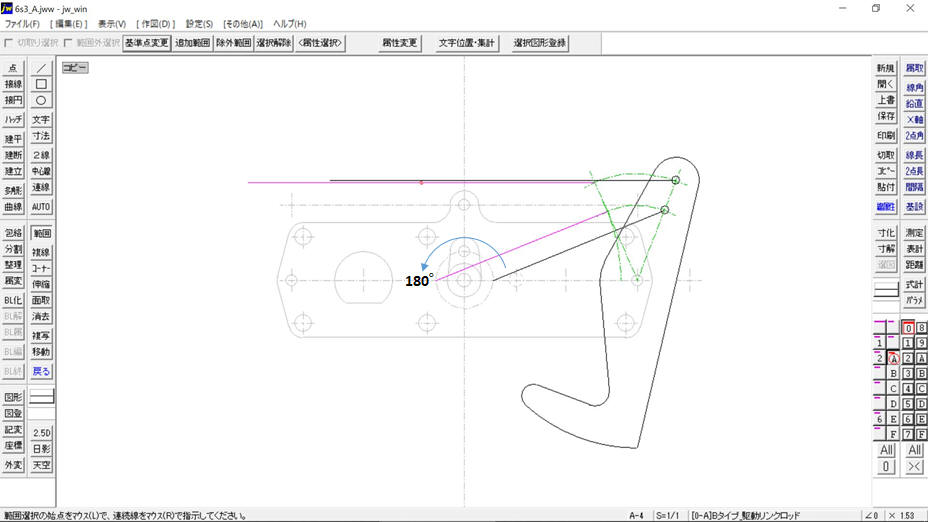
レイアウトの検討用組立図として、ここではフォルダ「akurirurobo」にファイル名「6s3_A.skp」で保存しています。
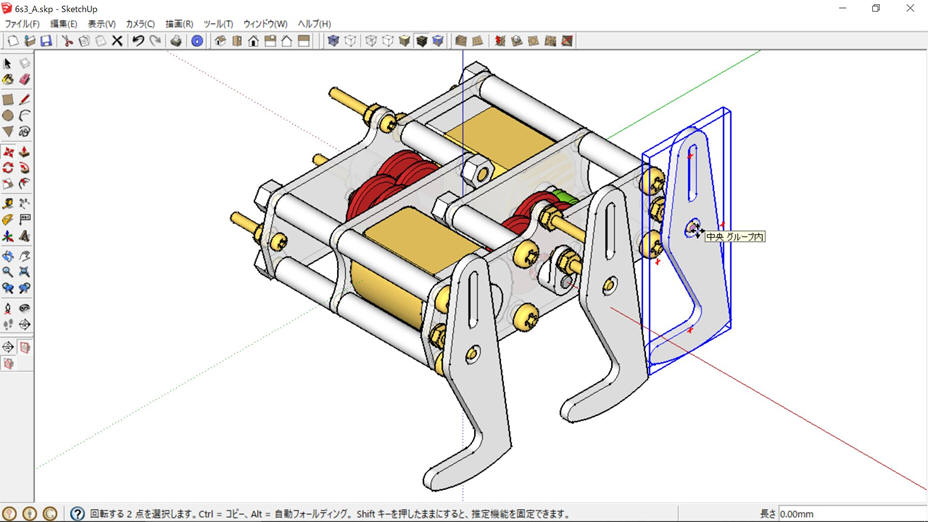
「移動(コピー)」で「足」を仮組します。
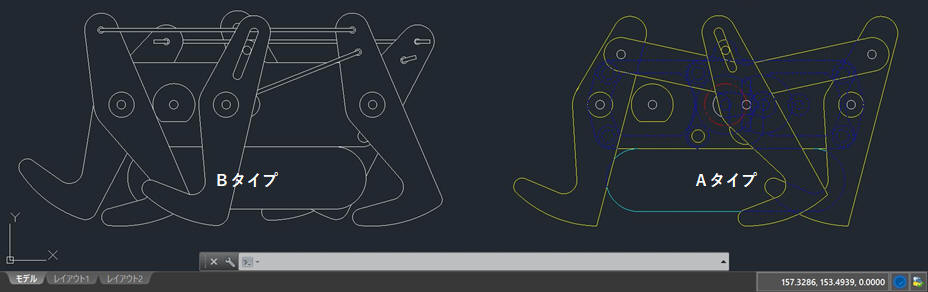
クランクの上限と下限(180°回転)での足の位置を示す
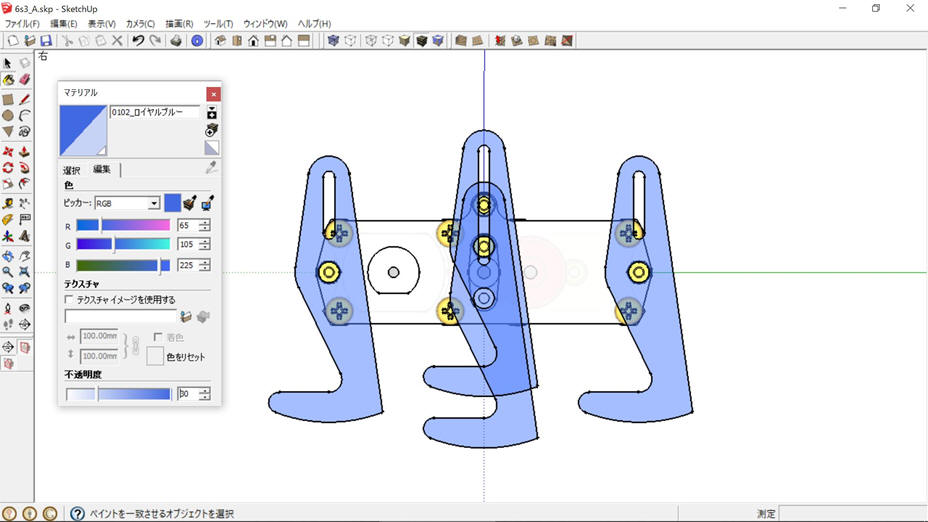
クランクの状態を見るために、足を半透明色にしています。
Aタイプ用「駆動リンク板」
2mmアクリル板から加工します。3D_CADでレイアウトしながら、2D_CADで寸法や形状を検討しています。
汎用動力ユニット設計用2D_CADファイル「GBm13x2.jww」を開いてください。
ファイル名「6s3_A.jww」で保存して、「駆動リンク板」の3DSファイルを作成します。
穴あけの中心点を求めます、[0-1]を「書き込みレイヤ」にしましょう。
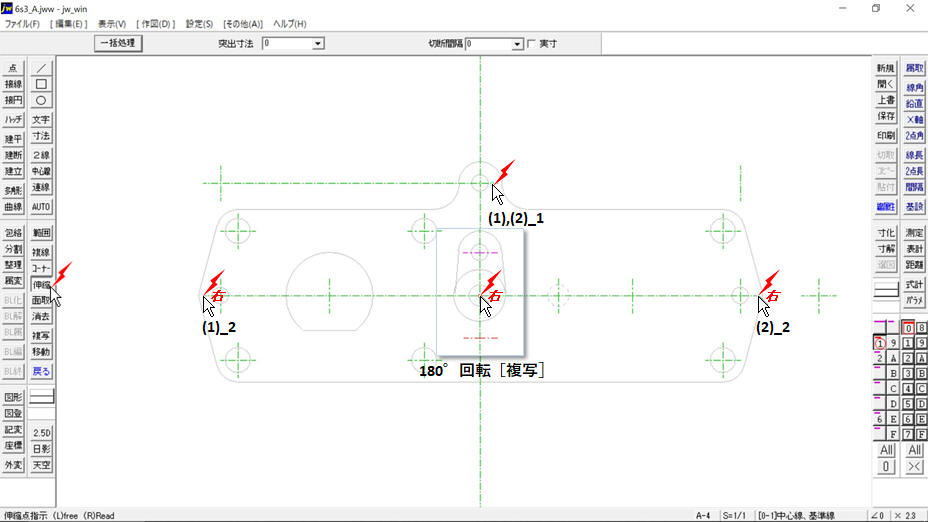
■ [複写]
(1)範囲選択の「始点_終点」を指示 (2)_1[追加範囲] _2「始点_終点」を指示 (3)_1[基準点変更] _2「基準点」を指示
_3「複写先」を指示
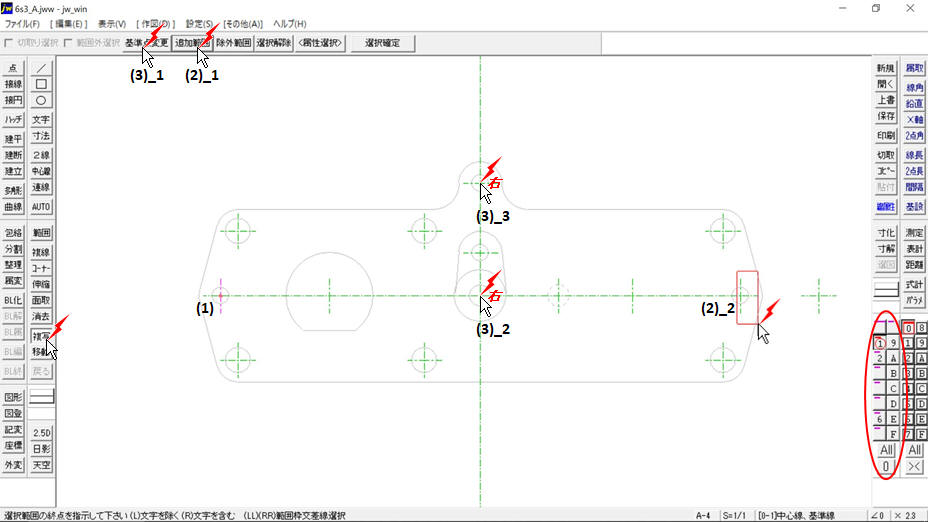
■ 「[伸縮](1),(2)止め穴のセンターを作図 ■ 「[複写]クランピンの下限でのセンターを作図
[0-9(「駆動リンク板」と名前を付けています)]を「書き込みレイヤ」にします。
穴のセンター(4ヶ所)を中心点とする「円(半径4)」を「接線」及び「接円(半径3)」でつなぎ、外形を描いています。
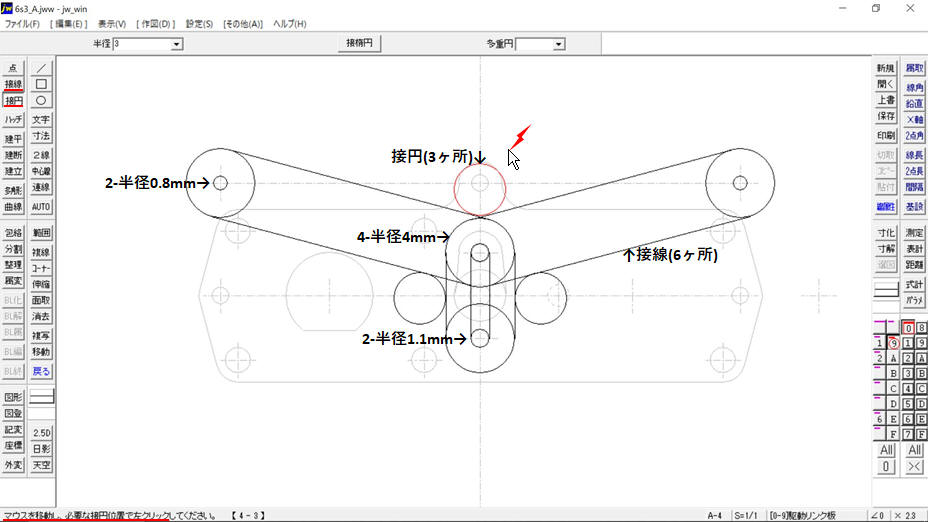
長穴の側面の直線も「接線」で描けます。
「消去」の「…部分消し」や「伸縮」で形を整えます。
ここまで描き終えて「上書(保存)」します。→2D_CADファイル「6s3_A.jww」
書込みレイヤ[0-9(「駆動リンク板」]の図形をコピーして、新しいファイルに貼り付けます。
「範囲」全選択→「コピー」、「新規作成」→「貼り付け」
同じ名前のdxfファイルとして保存し、3DSデータを同時出力しましょう。
「名前を付けて保存」から、「新規」→名前「6s3_A」、[保存形式dxf] で保存
3dsファイルを残し、dxf ファイルは削除しています。
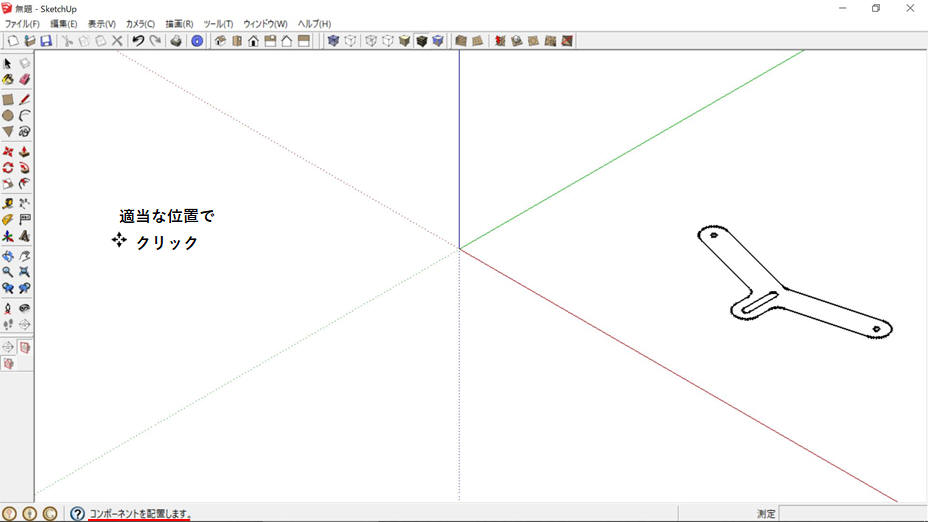
SketchUp 8 を起動→保存した3DSファイル「6s3_A.3ds」を「インポート」
描画軸と図形が現れるまで、マウスホイールを手前に回す
■ 分解
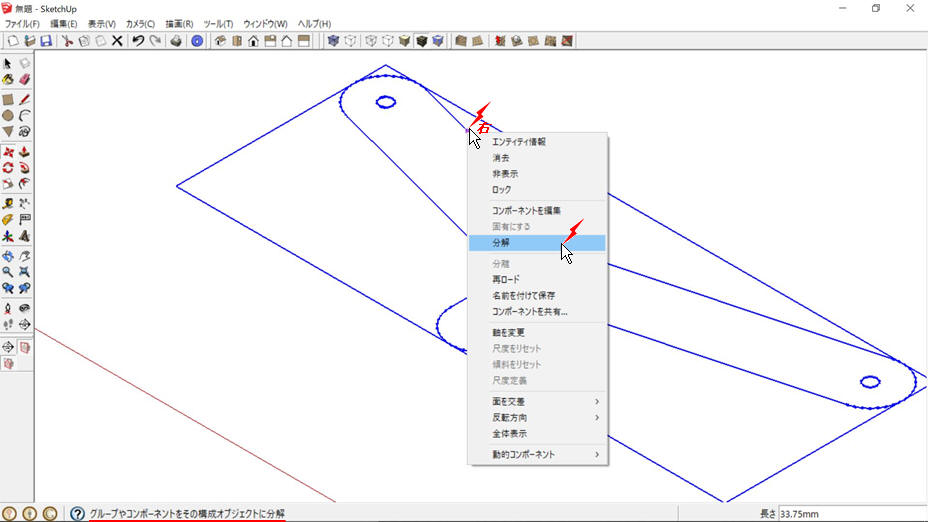
再度分解(四角い枠が無くなる)
■ 選択
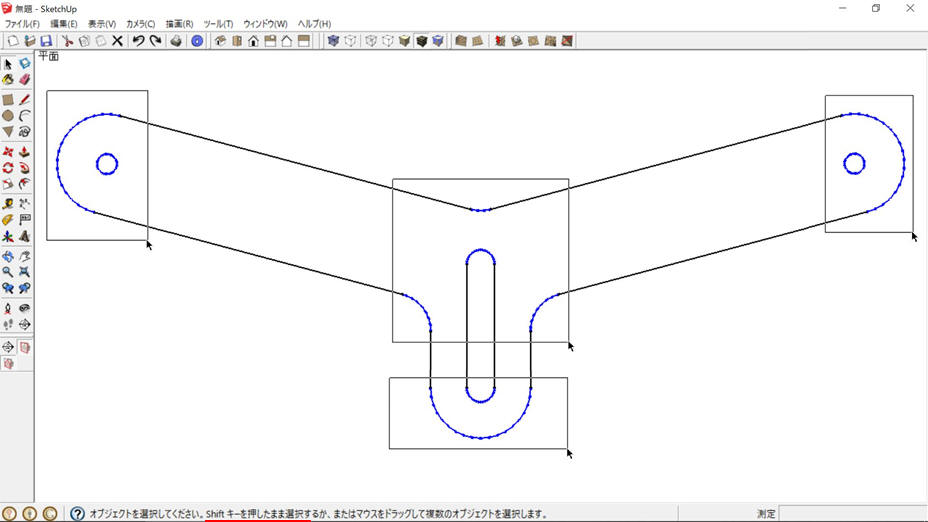
直線以外を選択して「消去(Delete)」
■
作図画面の縮尺を変更
[メジャー]ツール(長穴の直線部の寸法を計測後、実寸10を入力)で「モデルのサイズを変更しますか?[はい]」
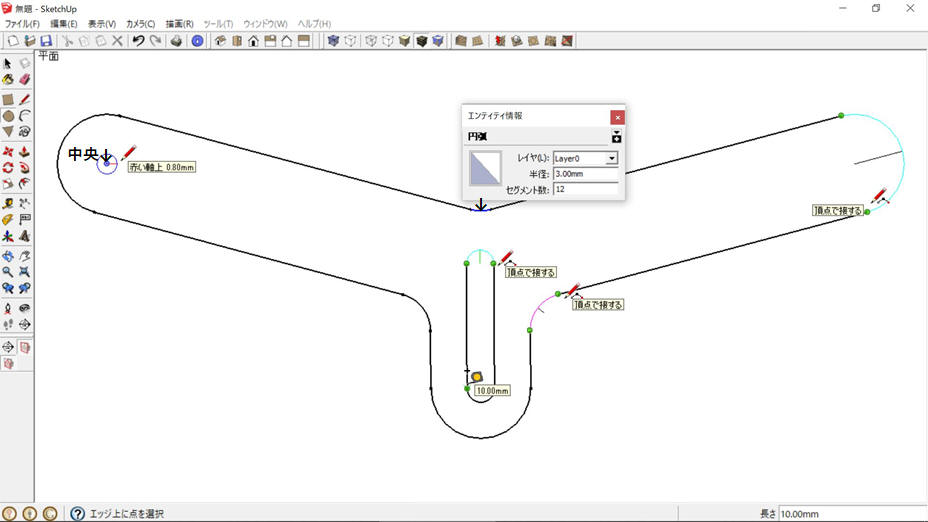
直線を「円弧」でつなぎ、面を作ります。円周をなぞって「中央(推定機能)」に「円」を描いています。
「円弧」半径4_3ヶ所,半径3_3ヶ所,半径1.1_2ヶ所、 「円」半径0.8_2ヶ所,
2mmアクリル板加工品として描き、完成した3D_CAD図をAタイプ用「駆動リンク板」単品図「6s3_Adlb.skp」として保存しています。
組立図に「貼付」て、リンク機構の具合を検証しましょう。詳細は次ページ「複数のレイヤを使ってアニメーション作成」で解説しています。
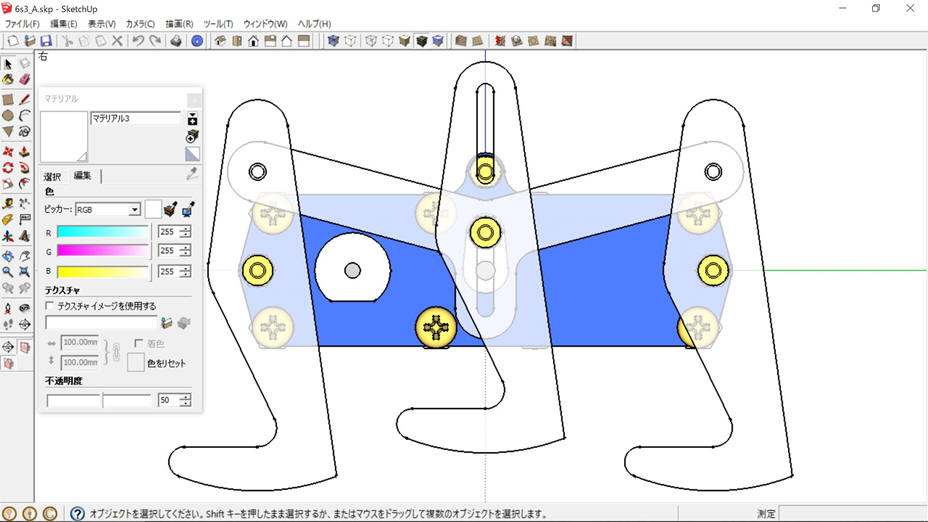
図では、前後の「足」の長穴を穴に変更済
足回り部品を組み込んで上書き「保存」しています。→Aタイプ検討用組立図「6s3_A.zip(圧縮ファイル)」
Bタイプ用「駆動リンクロッド」
ここでは、Bタイプの設計も合わせて進めていきます。
共通部品「足」の2D_CAD図「8000A-0001-00.jww」を開いてください。
[0-1]を「書き込みレイヤ」にし、他を非表示
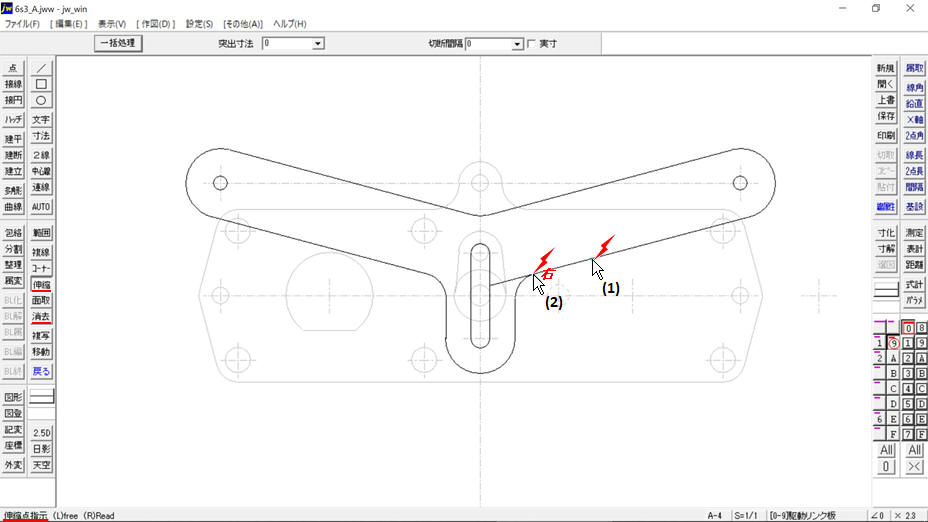
不要な線を「伸縮」と「消去」で消して、外形線のみコピーしましょう。
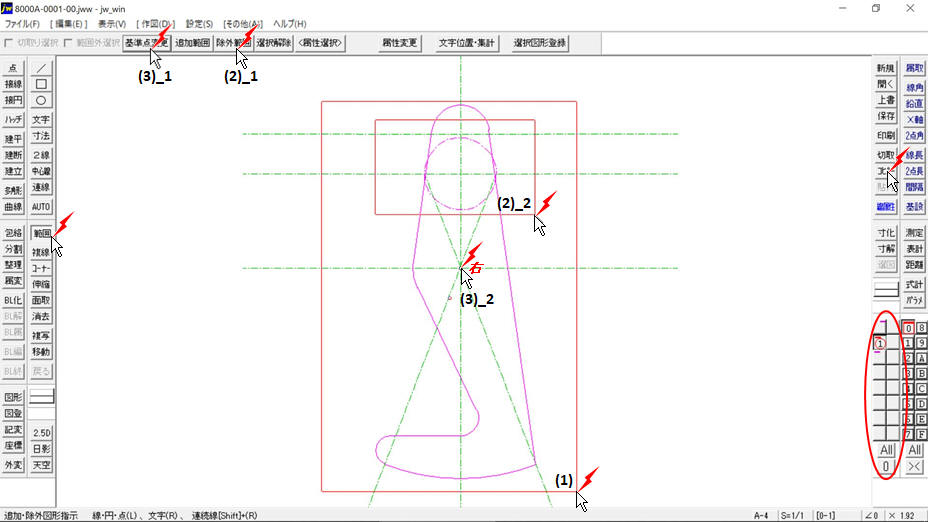
■ [範囲]
(1)範囲選択の「始点_終点」を指示 (2)_1[除外範囲] _2「始点_終点」を指示 (3)_1[基準点変更] _2新しい「基準点」を指示→
■ [コピー]
■ [貼付]
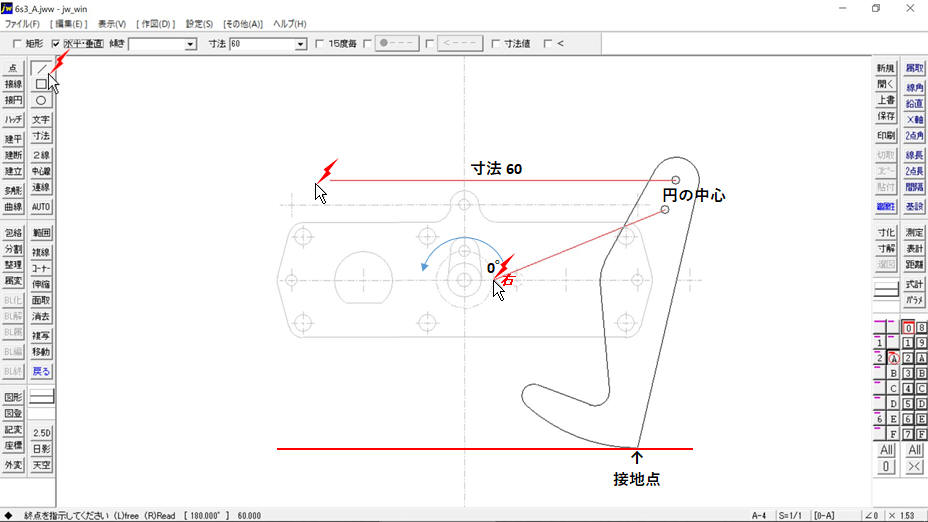
2D_CADファイル「6s3_A.jww」の[0-A]を「書き込みレイヤ」にして、図の位置に「貼り付け」
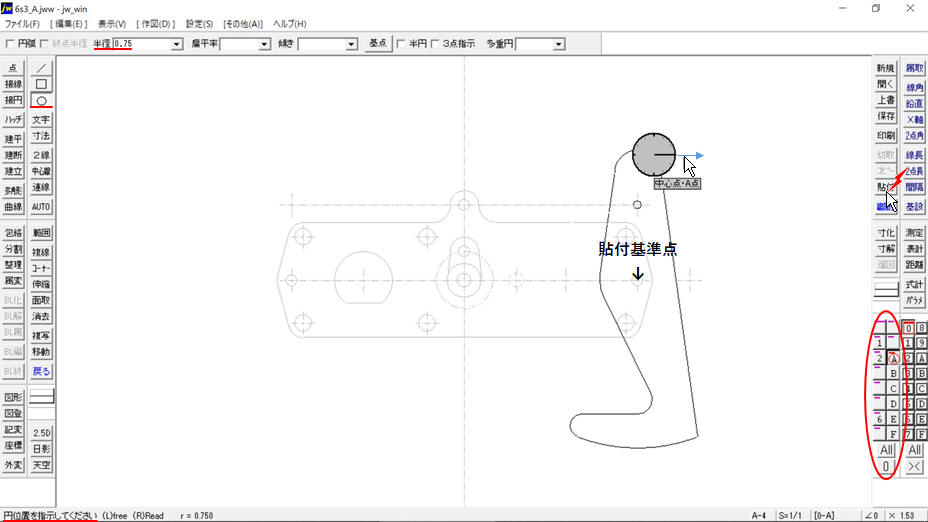
従動足として貼り付け、半径0.75の円を2ヶ所描いています。
■ [移動(回転)]
回転角度を取得するための直線(回転の中心から円弧の端点まで)を一時的に引いておきます。
(1)範囲選択の「始点_終点」を指示 (2)_1[基準点変更] _2新しい「基準点」を指示
(3)_1[設定]→[角度取得]→[線鉛直角度] _2「基準線」を指示→「回転の中心」を右クリック
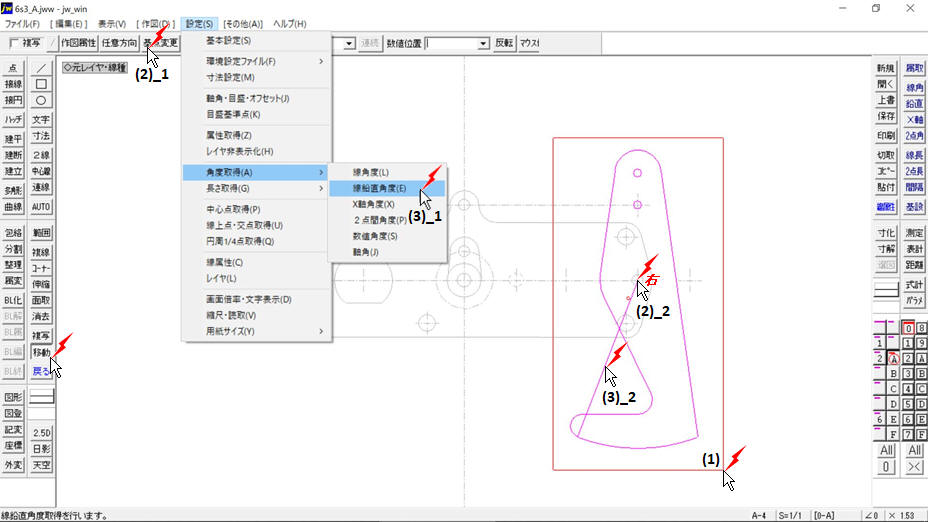
駆動足接地終点(クランクが水平な位置)が従動足接地始点となるよう、「直線」を引いて「駆動リンクロッド」の長さを決めています。
軸間距離と角度が作図されました。3D図作成のための3DSデータを出力しましょう。
■ [範囲(交差選択)]
選択の「始点」をクリック→「終点」をダブルクリック
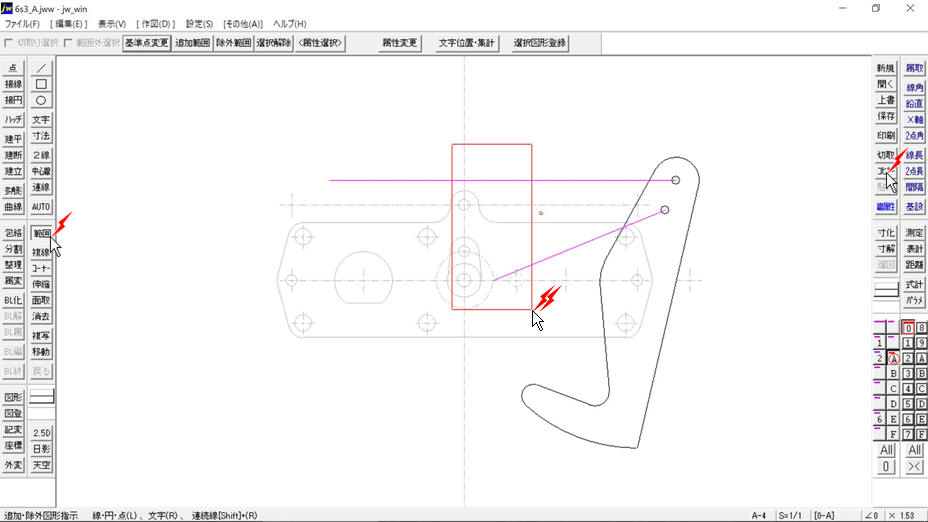
ロッドを選択して[コピー]、新しいファイルに貼り付け
同じ名前のdxfファイルとして保存し、3DSデータを同時出力しましょう。必要な「3dsファイル」が同一フォルダに作成されます。
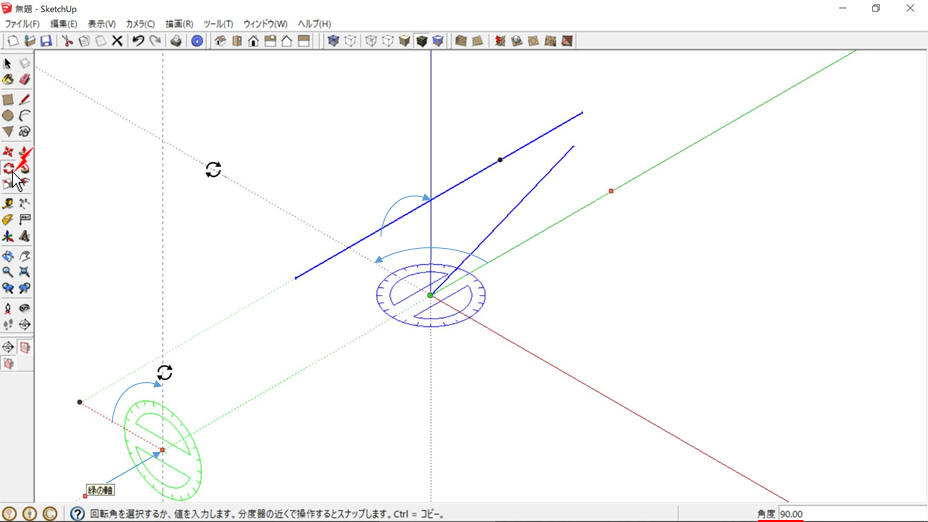
SketchUp 8 に「インポート」して、拡大(ここでは100倍)して作図を進めています。

「平面」に配置されているので、「組立図」に合わせて「右(側面)」に移動します。
■ 回転(移動)
「青い軸」方向にCCW90°、「緑の軸」方向にCW90° ポインタを軸に沿ってドラッグすると、回転の中心と軸方向が固定されます。
駆動側ロッドを「曲げ加工φ0.8ピアノ線」で製作します。「フォローミー」の「パス」として部材の中心線を描きましょう。
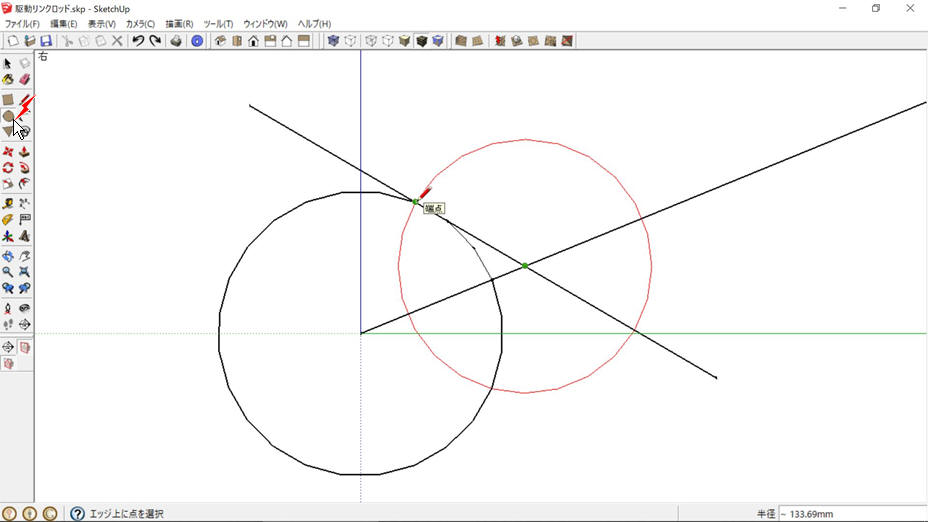
クランクピンを通す穴を作図
直線の「端点」を「中心点」とし「エッジ上に点を選択」して、半径150の円を描く
続けて、曲げを表現する円弧を描くための線(円弧に端で接する接線)を円から引きます。
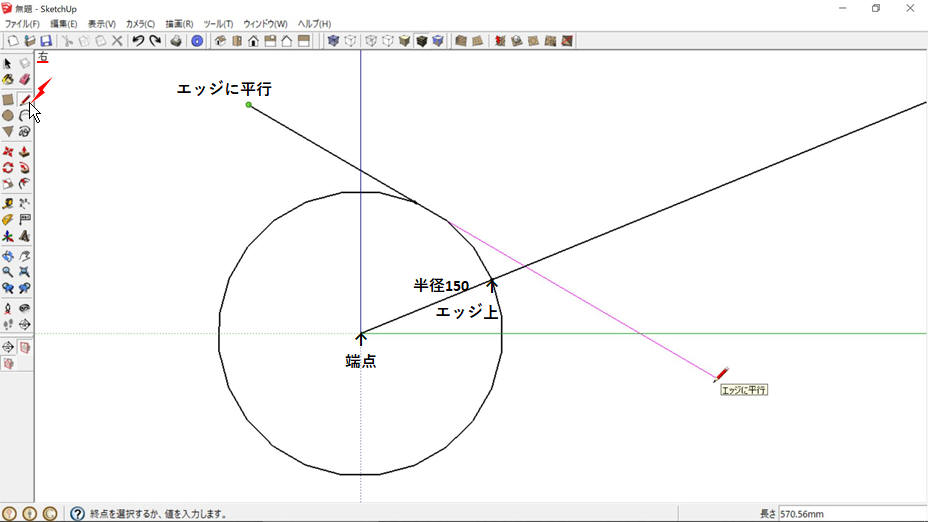
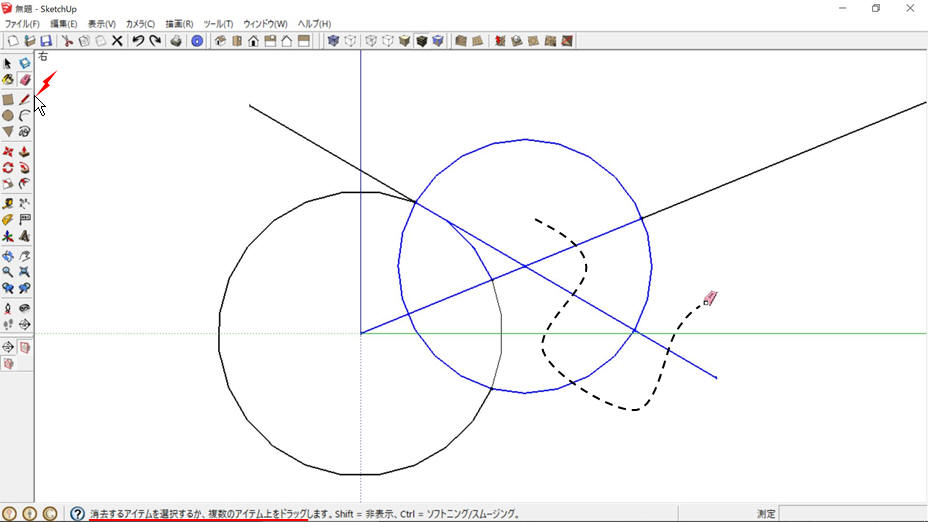
図のように、円周上から「エッジに平行」な直線を引く
「中心点」を直線の交点、半径を円周上の「端点」として円を描く
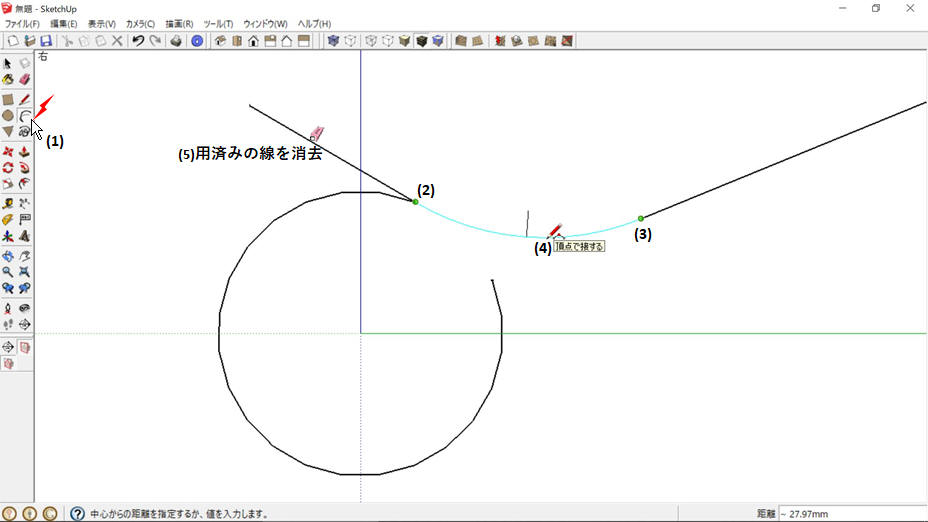
不要な線を「消しゴム」で消去
「円弧」でつなぎます。
エンド部分と従動側ロッド(曲げ加工φ1.0ピアノ線)の作図手順は「フォローミーの練習
ベンダー加工」を参照してください。
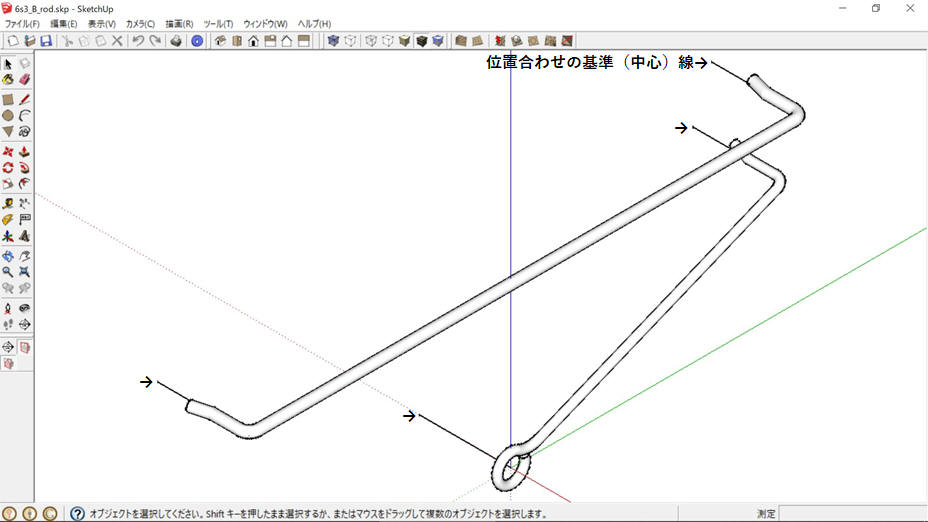
図のように、補助線を描き加えてBタイプ用「リンクロッド」単品図「6s3_B_rod.skp」として保存しています。
もう一方の「クランク水平位置」でのロッドの位置も、2D_CADで作図し(別名「6s3_AB.jww」で「保存」)3DSデータ化しています。
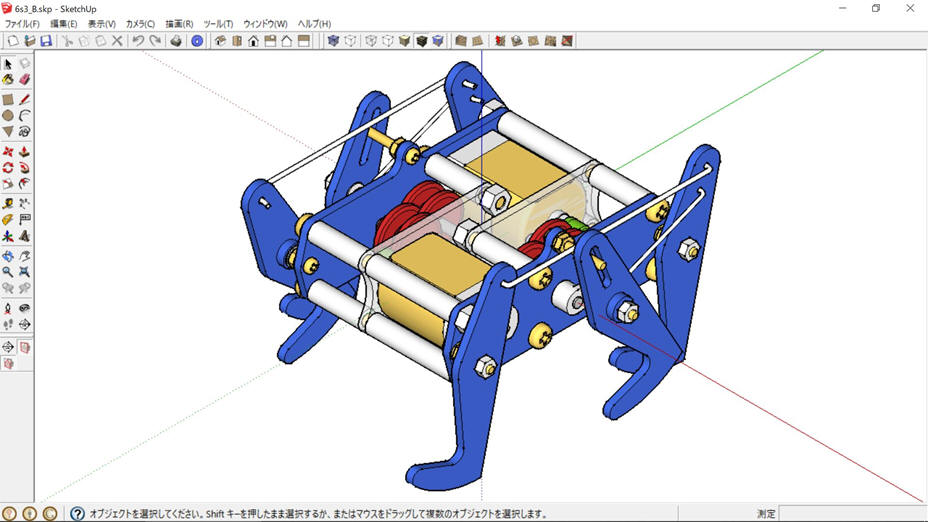
Aタイプ検討用組立図の「駆動リンク板」をロッドに変更します。
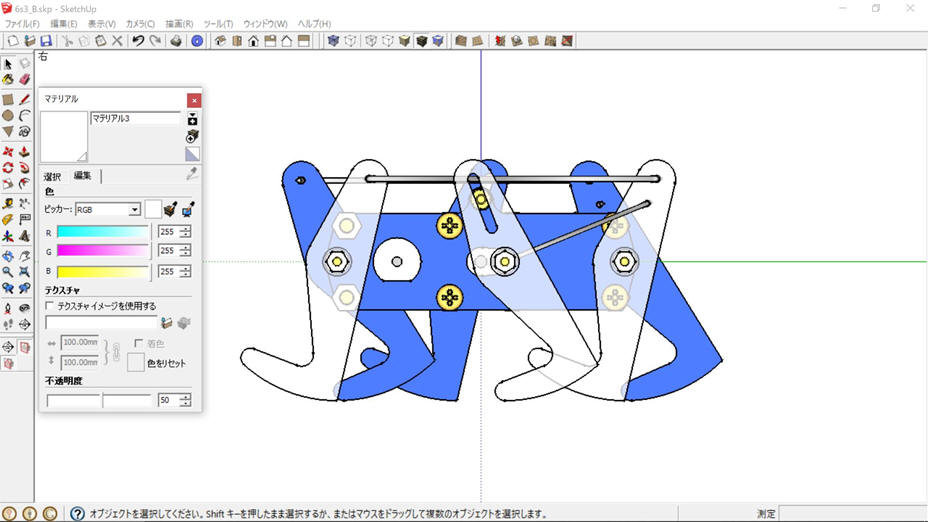
Bタイプ検討用組立図「6s3_B.zip(圧縮ファイル)」として「保存」しています。
[戻る↑]
合志市栄のマイファブラボ SAKAEPC ものづくりサポートCAD講座 [目次へ] [←前へ][次へ→]