合志市栄のマイファブラボ SAKAEPC
ものづくりサポートCAD講座
駆動模型の設計
汎用動力ユニット・・・2D_CADと3D_CADの併用
[進む↓]
胴体部に二組のモータとギアボックスを組み込んで、センターから両サイドのクランクに出力するタイプです。
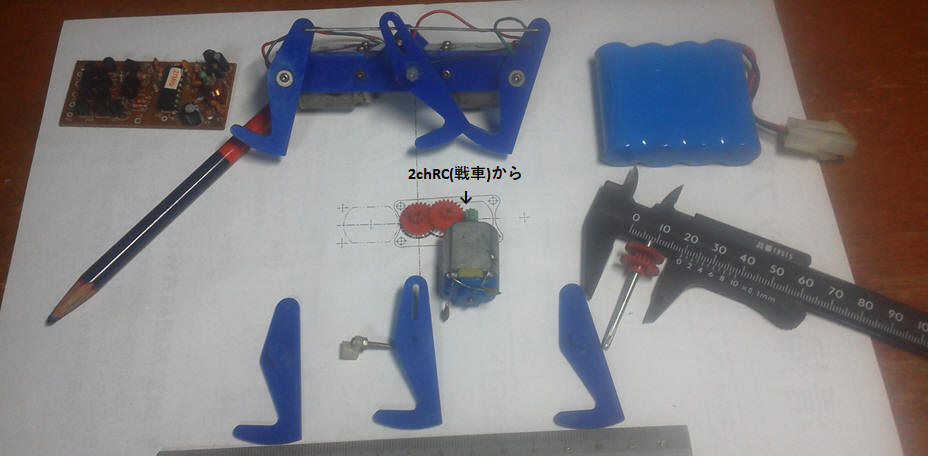
ラジコン化のための設計を行いましょう。写真は、既存の製品(有線)とトイラジコンから外した部品を並べて、検討しているところです。
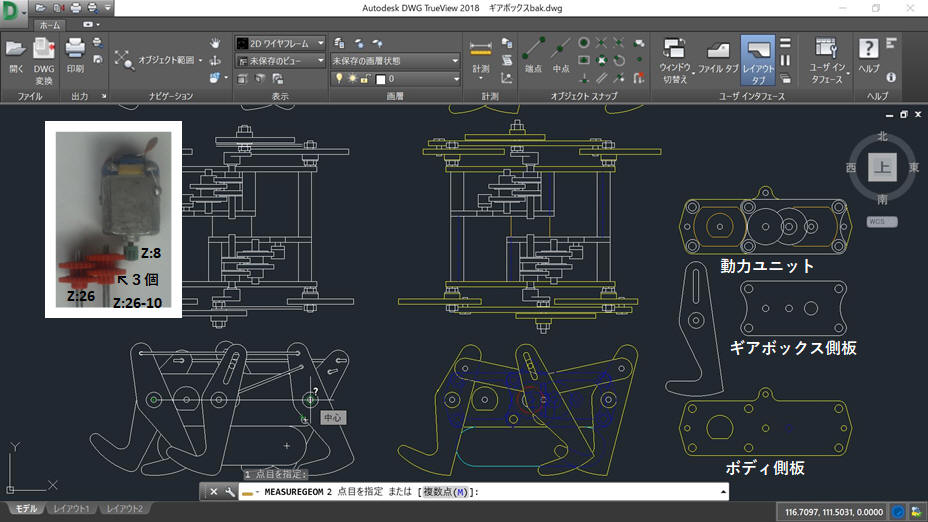
減速比はトイラジコンと既存の製品の動きを見て決めました。過去に作成した「DWGファイル」を「DWG TrueView」で表示しています。
ギアボックス
標準部品「クランク」を基に、2D_CADでモーターとギアをレイアウトします。「図面枠(a4sakaepc1-1.jww)」を開いてください。
Jw_cad
■ 「名前を付けて保存」
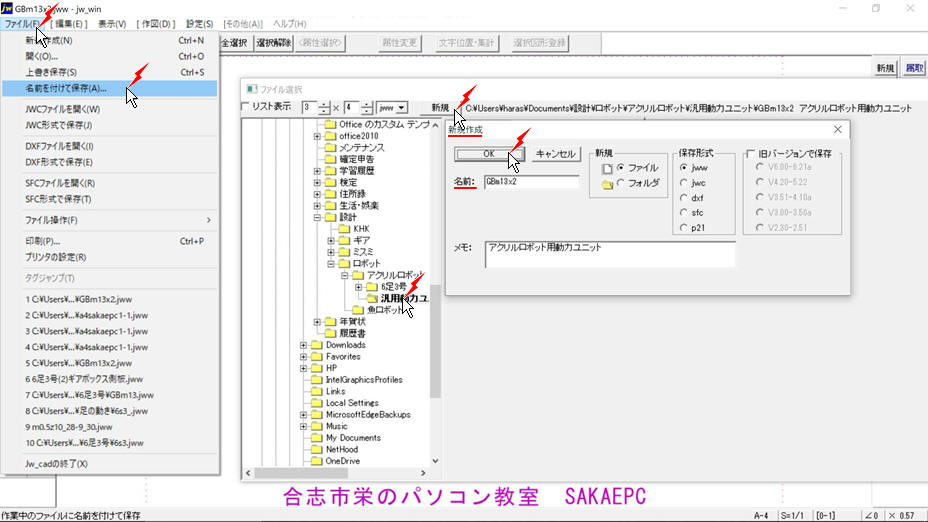
フォルダ「\設計\ロボット\アクリルロボット\汎用動力ユニット」に、別名「GBm13x2.jww」で保存しています。
■ レイヤグループ名設定
「レイヤグループバー」から「書き込みレイヤグループ」のボタンを右クリック→「レイヤグループ一覧」
一覧から「レイヤグループ番号」をクリック→「レイヤグループ名設定」で名前を付ける
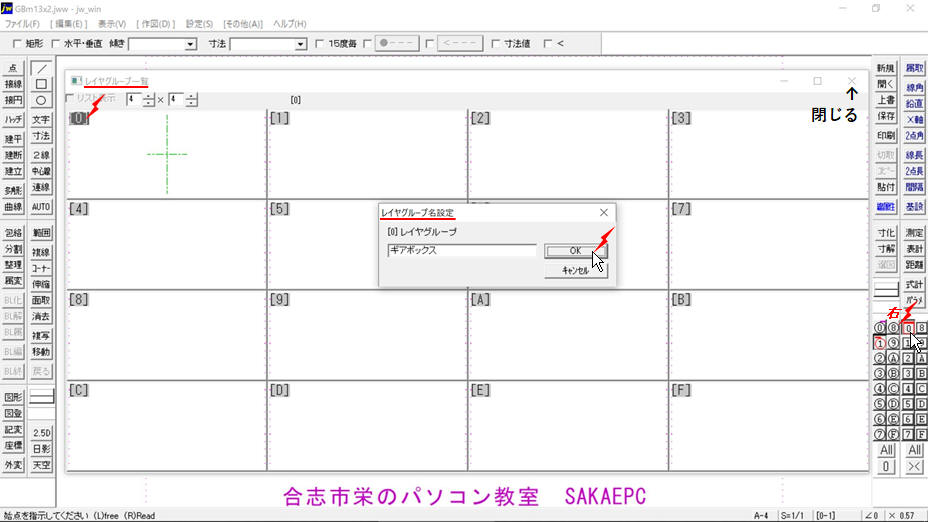
現在使用中のレイヤグループに、組立部品名(ギアボックス)を割り当てます。
■ レイヤ名設定
「レイヤバー」から「書き込みレイヤ」のボタンを右クリック→「レイヤ一覧」
一覧から「レイヤ番号」をクリック→「レイヤ名設定」で名前を付ける
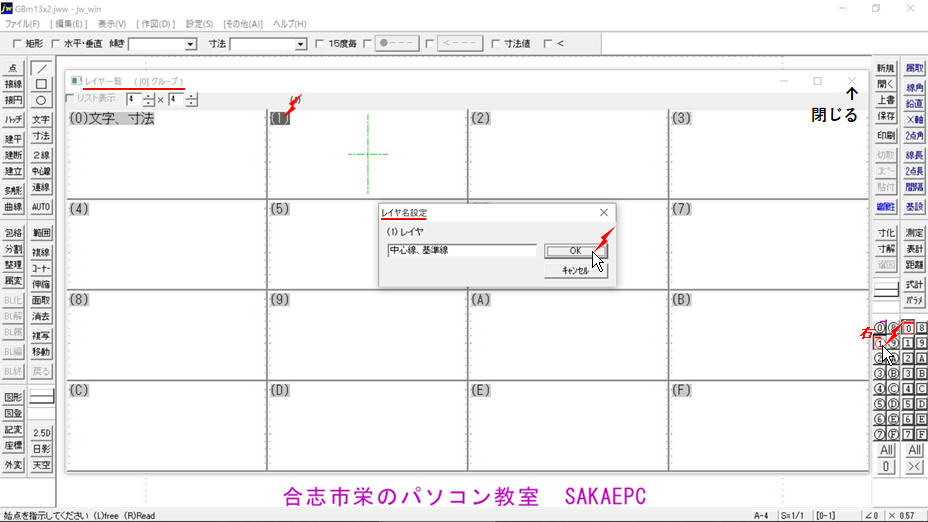
「0」レイヤグループの「0」レイヤを「文字、寸法」、「1」レイヤを「中心線、基準線」とします。
別図面からコピー
クランクは芯間距離5mmの標準部品を使います。「8003A-0004_5-00.jww」を開いてください。
■ レイヤ状態一括変更
「レイヤバー」の[All]ボタンを右クリック→全てのレイヤが編集可能
■ 範囲
(1)「[範囲]範囲選択:範囲を指定し図形を選択します」→(2)範囲選択の始点を指示→(3)終点を指示→(4)、(5)[基準点変更]
■ 「コピー:選択範囲をコピーしてクリップボードに保存」
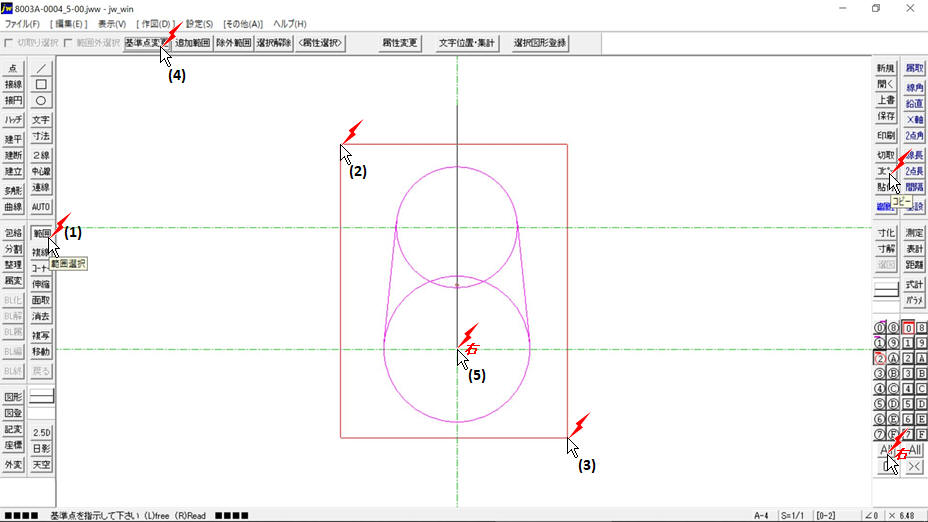
「GBm13x2.jww」の[0-2(「クランク」と名前を付けています)]を「書き込みレイヤ」にする
■ 「[貼付]貼り付け:クリップボードの内容を張り付け」
右クリックで複写位置を指示
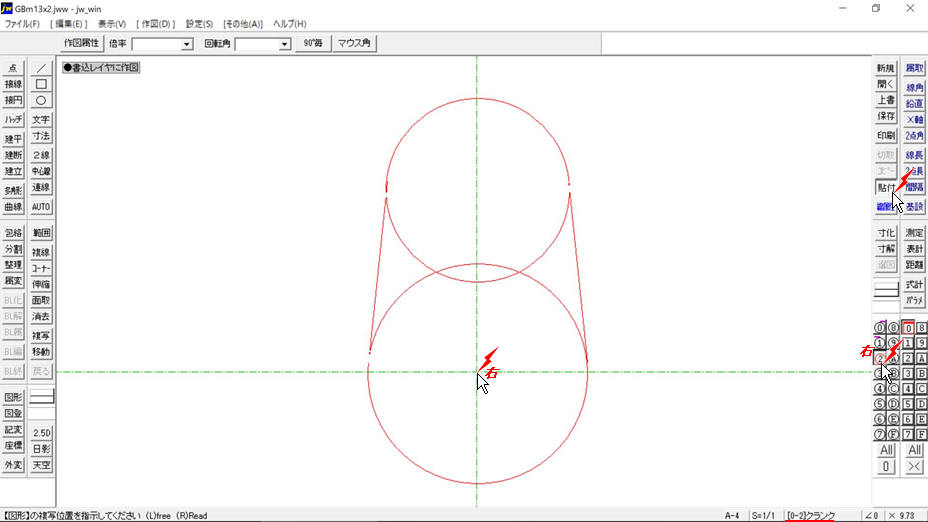
コピー元は3DSデータ作成用です。線を少し整理しましょう。
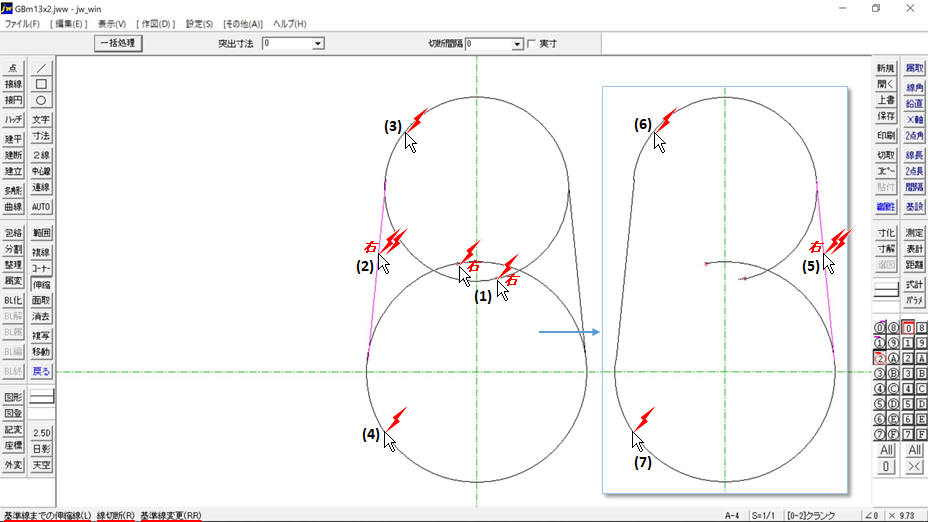
■ 「[伸縮]線伸縮:線を伸縮します」
(1)右クリックで線切断、二ヶ所 (2)右ダブルクリックで基準線指定 (3),(4)基準線までの伸縮線をクリック、二ヶ所
(5)基準線変更(RR) (6),(7)基準線までの伸縮線(L)
上部Rの中心線を引きます。
■ 「[複写]図形複写:図形を複写します」
(1)範囲選択の始点をマウス(L)で (2)選択範囲の終点を(LL)範囲枠交差線選択で指示 (3)[選択確定]
(4)上部Rの線上から3時方向に右ドラッグ(クロックメニュー:中心点)
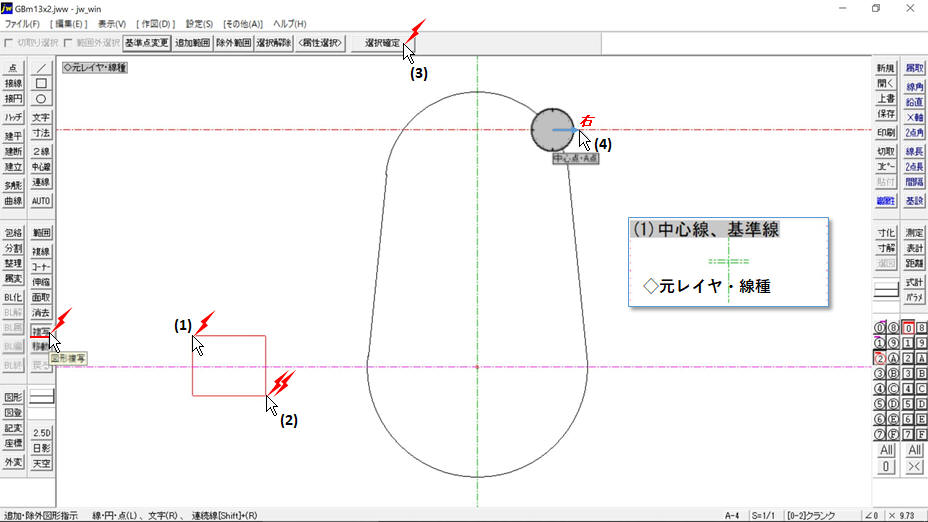
元レイヤに同じ線種で複写されます。
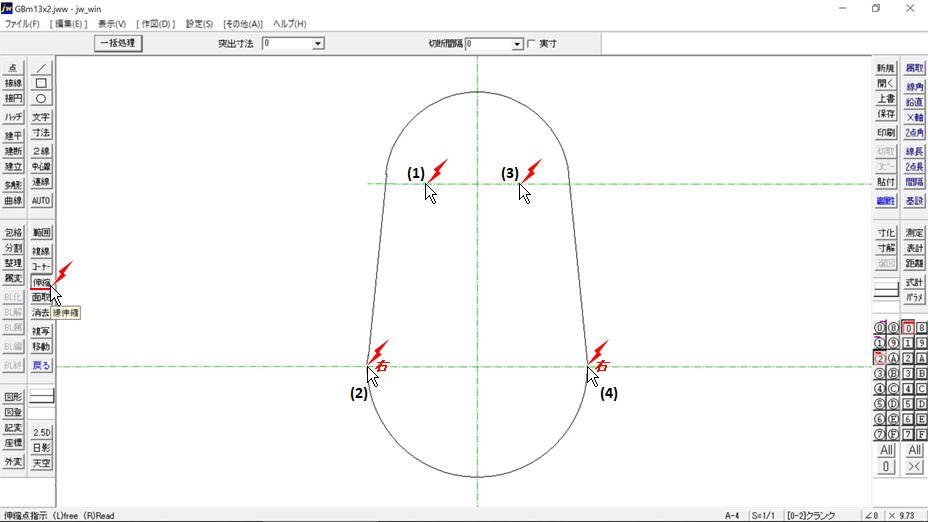
長さを整えましょう。
■ 「[伸縮]線伸縮:線を伸縮します」
(1)指示点までの伸縮線(L) (2)伸縮点指示(R) (3),(4)繰り返し
ギアをレイアウト
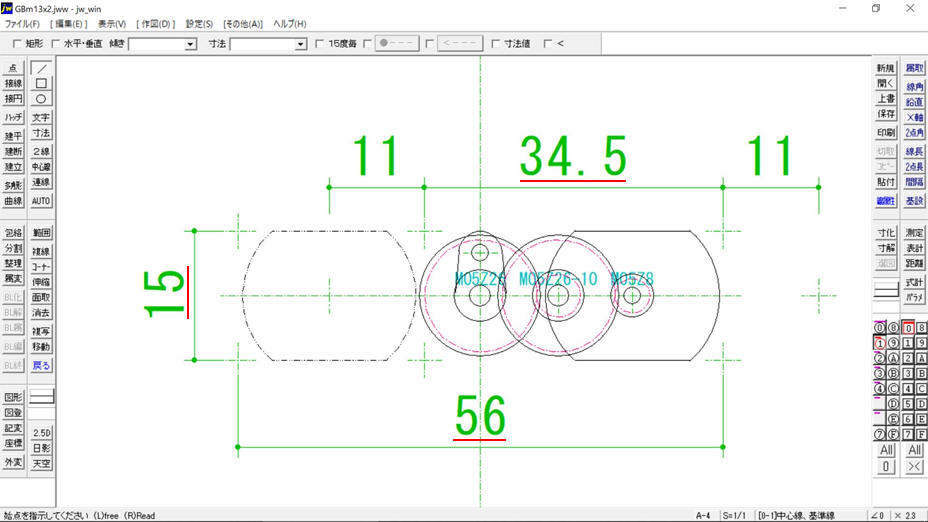
平歯車の基本寸法はモジュールと歯数で決まります(ピッチ円直径d=モジュールm×歯数z)。ここでは簡略化して描きましょう。
[0-3(「ギア」と名前を付けています)]を「書き込みレイヤ」にする
■ 線属性 線色8・一点鎖線1に変更 ■ 「[○]円:円を書く」
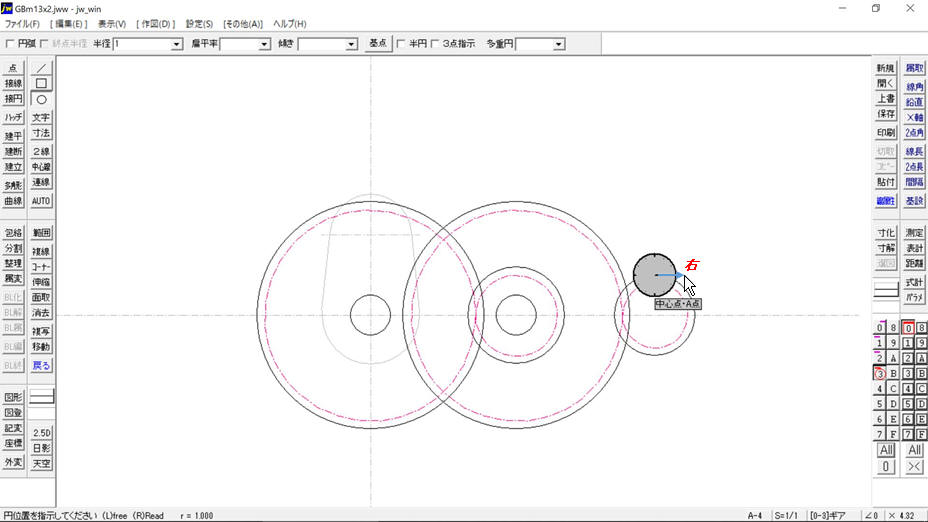
モジュール0.5・歯数26,10,8のピッチ円を描きます。
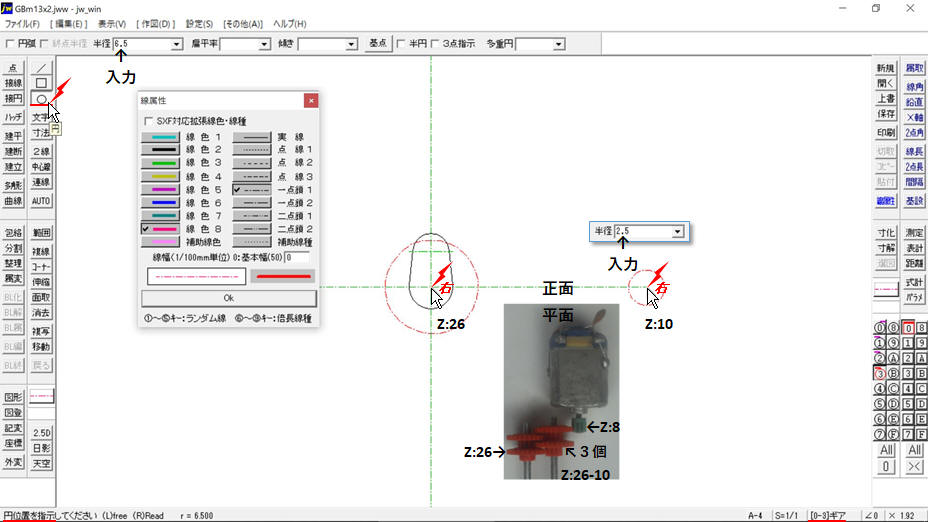
歯数26(半径:6.5)を出力軸(交点)に、歯数10(半径:2.5)は仮の位置(端点)に描きます。
■ 「[移動]図形移動:図形を移動します」
(1)範囲選択の始点を指示(L) (2)選択範囲の終点を指示(L) (3)[基準点変更] (4)基準点を指示(R) (5)移動先の点を指示(R)
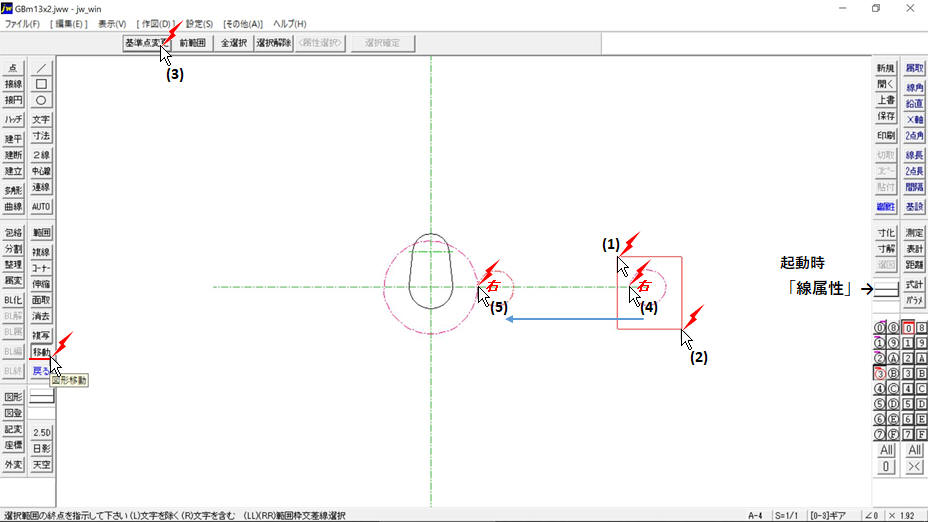
図では保存して再起動したので「線属性」が初期値に戻っています。「線属性」を合わせ、残りのピッチ円を描いてください。
歯先円(直径=d+2m)と軸穴(径2.5、2は加工値ではない)も描いています。
中心線を描き加えます。
■ 「[複写]図形複写:図形を複写します」
(1)範囲選択の始点を指示(L) (2)選択範囲の終点を指示(L) (3)[選択確定] (4)「回転角[90]」
(5),(6)円周上から3時方向に右ドラッグ(クロックメニュー:中心点)→複写先の点を指示
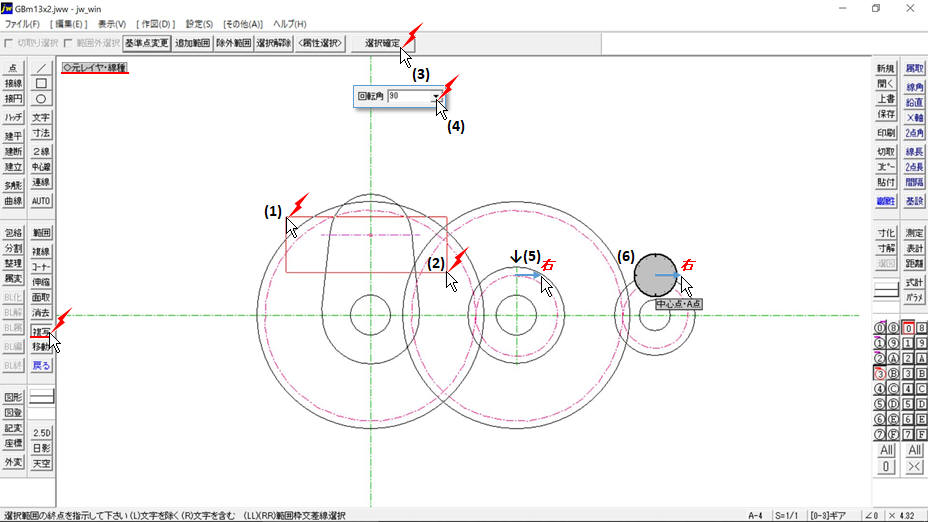
元レイヤに同じ線種で複写されます。
■ [文字]
「書込み文字種変更」→「文字種[1]」、「文字基点設定」→「中下」
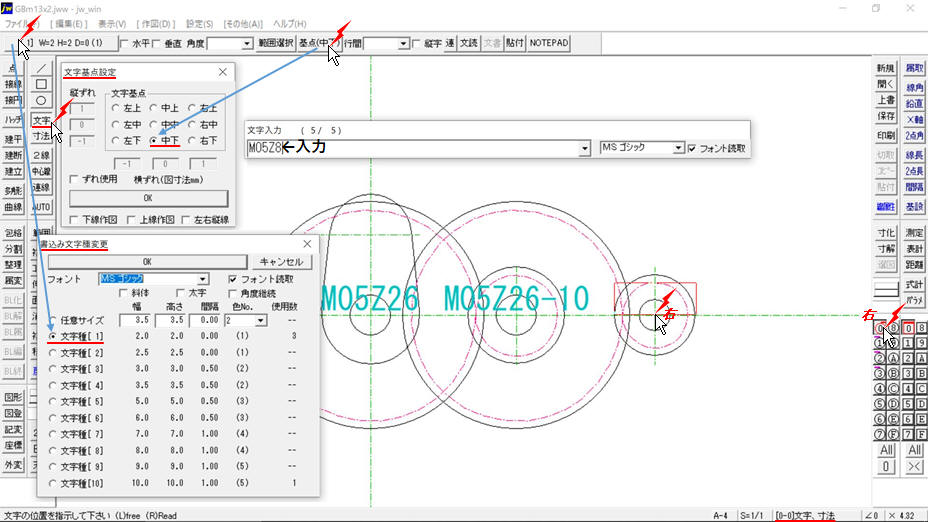
[0-0文字、寸法]を「書き込みレイヤ」にして、モジュールと歯数を表記します。
■ [測定]
始点を指示→次の点を指示→次の点を指示→…
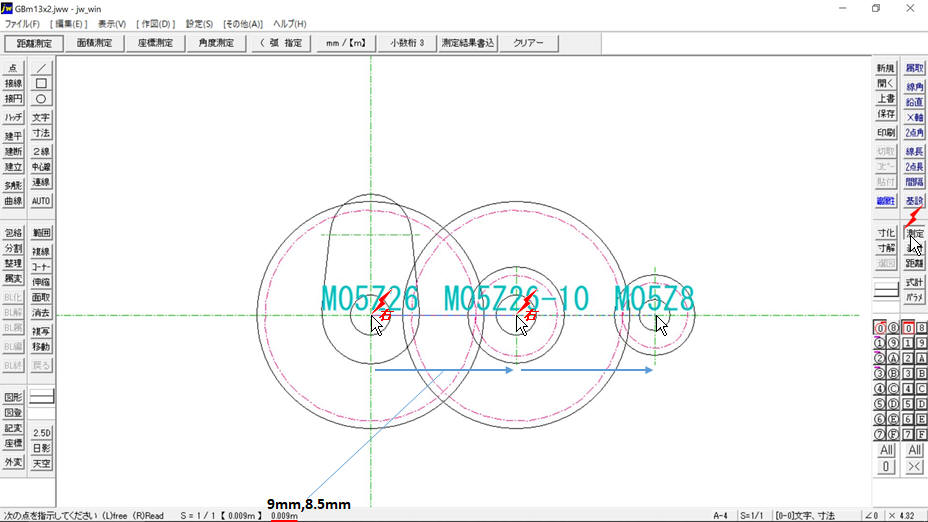
寸法は記入せず確認のみ行っています。
モーターをレイアウト
実測して描いています。
[0-4(「モーター」と名前を付けています)]を「書き込みレイヤ」にし、他を「表示のみレイヤ」にする
■ 「[複線(両側複線)]:元の線に平行な線をつくります」
(1)「複線間隔」に高さ寸法の1/2値を入力 (2)複線にする図形を選択 前回値(R) (3)[両側複線]
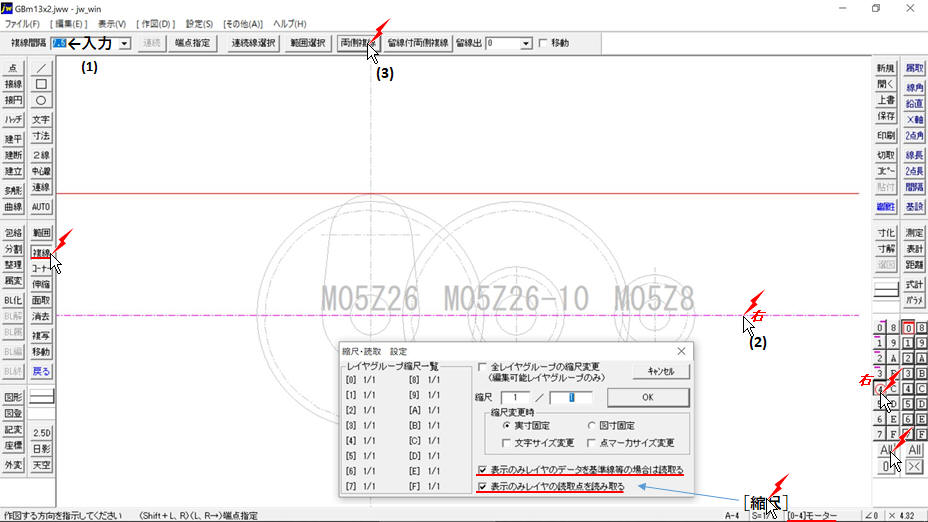
「表示のみレイヤ」のデータ(中心線)を読み取っています。
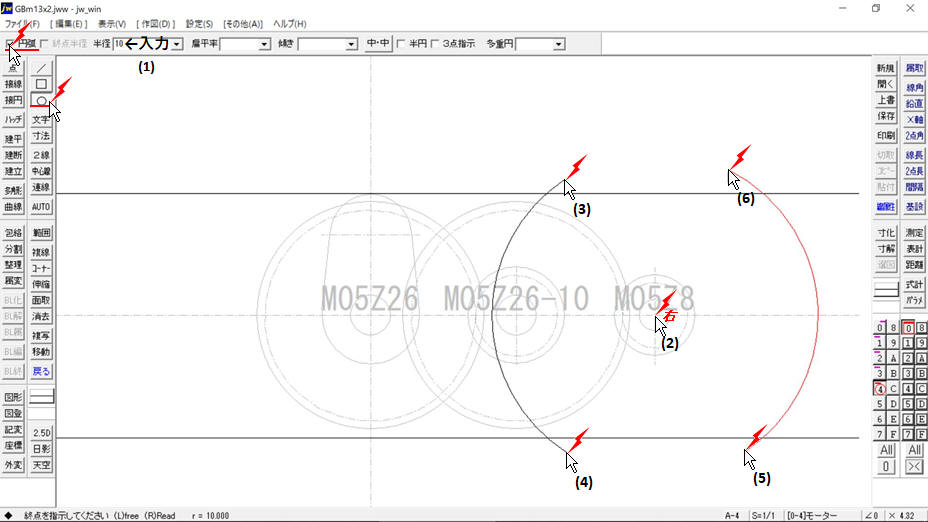
■ [円(円弧にチェック)]
(1)「半径」に値を入力 (2)円の位置を指示(R) (3)円弧の始点を指示(L) (4)終点を指示(L) (5),(6)繰り返し
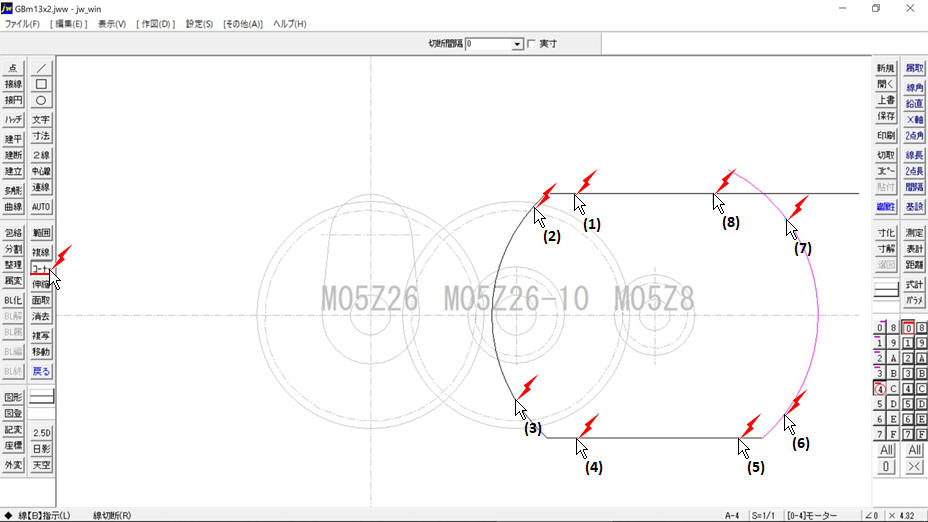
■ 「[コーナー]コーナー処理:2線のコーナー処理を行います」
(1)線(A)指示(L) (2)◆線【B】指示(L) (3),(4)…(7),(8)繰り返し
3D_CADで検証する
3D図面内に部品をレイアウトした「GBm13.skp」を開いてください。
クランク、ギア、モーター、及びシャフトを仮組してあります。
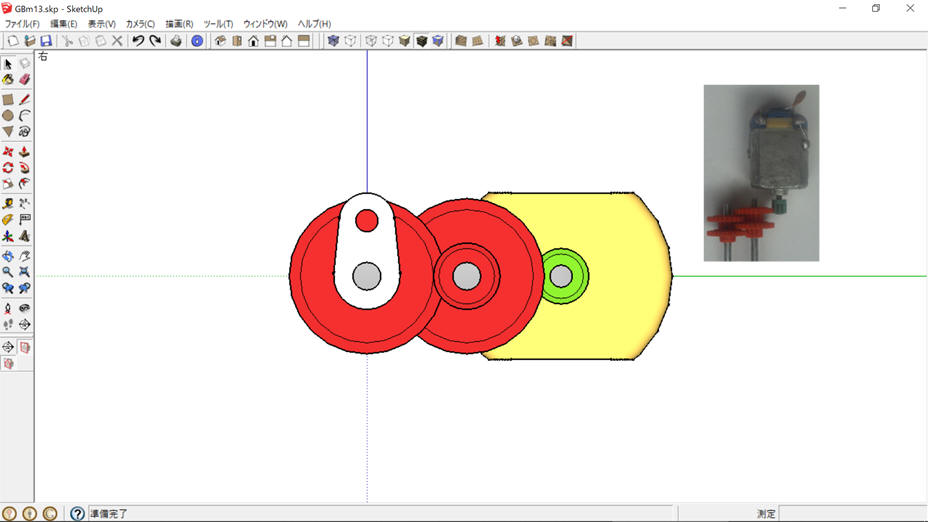
軸方向のスペースやシャフト長を、ここではすでに調整しています。
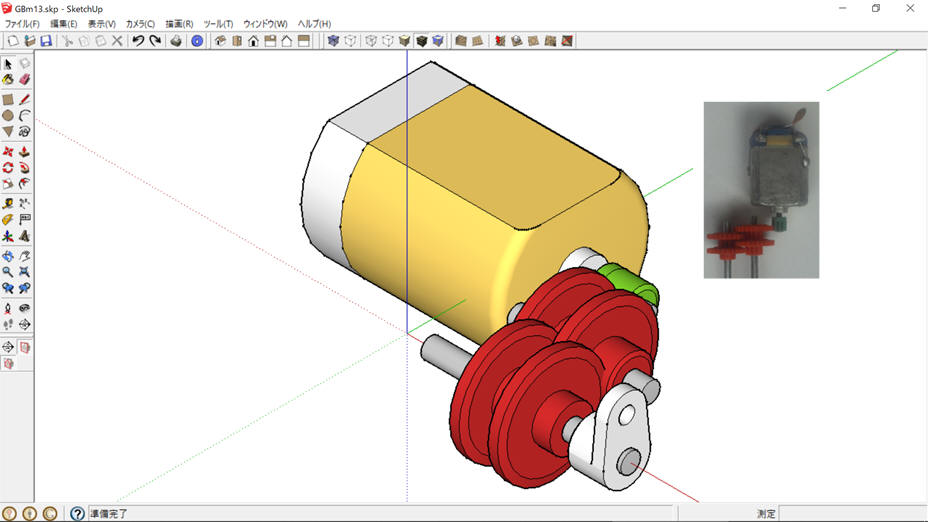
クランクは芯間距離5mmの標準部品「8003A-0004_5-00.skp」から、ボス穴径を変えて使います。各ギアは「歯車の製図」を参照
モータは「FA-130」タイプです。寸法図は「fa_130ra.pdf」で検索してください。
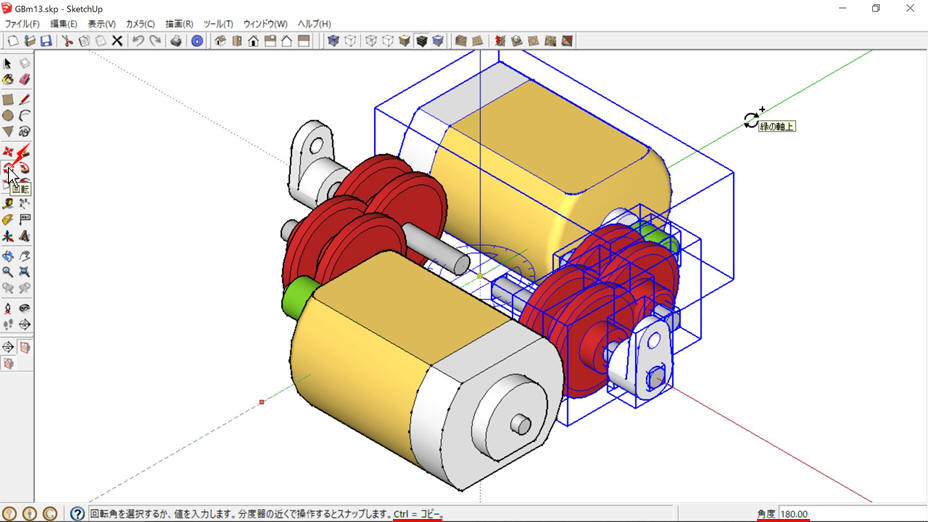
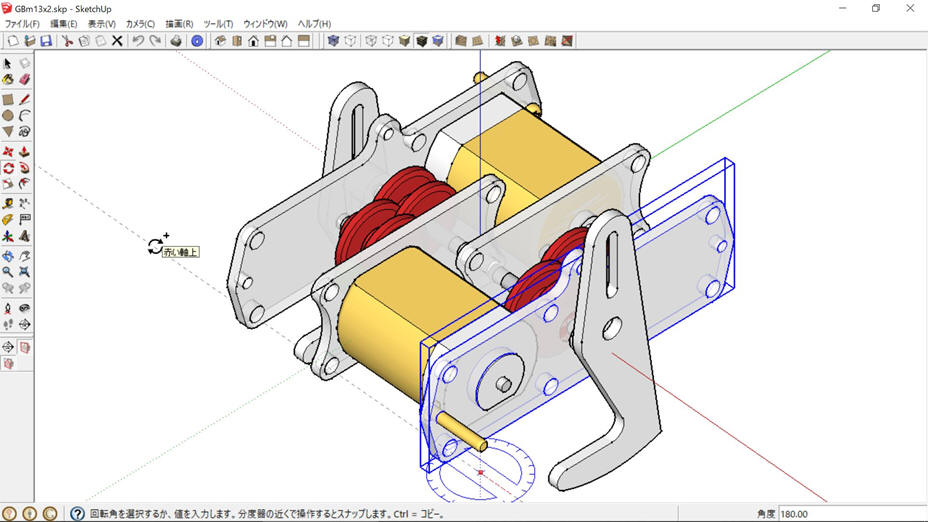
もう一方の動力機構を、図のように「回転複写」します。
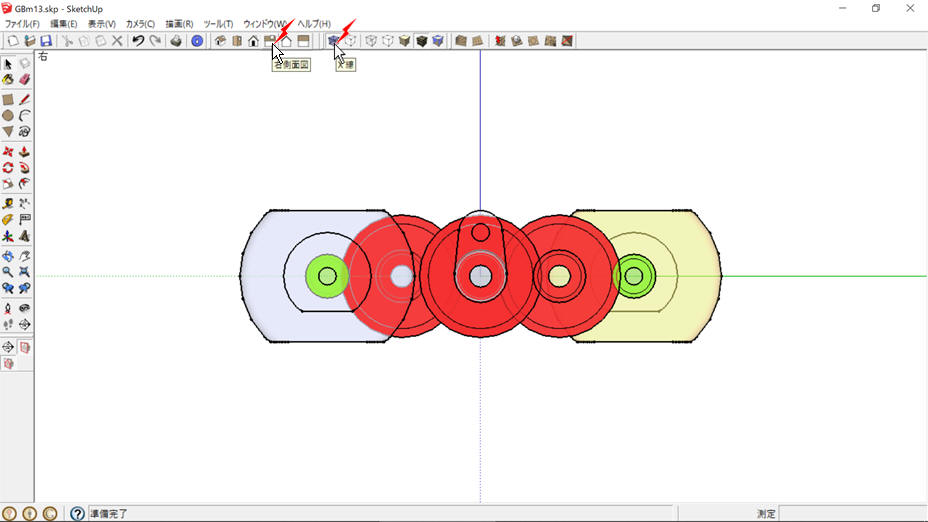
2D図面をイメージして「X線」で側面図を表示しています。
[ファイル]から[名前を付けて保存]で、ファイル名を「GBm13x2.skp」に変更しておきましょう。
軸受けを兼ねた「ギアボックス側板」と「ボディ側板」の、形状及び寸法を2D_CADで検討しましょう。
モーターやギアと干渉しないよう、止め穴の位置(6ヶ所)を決めています。
「ギアボックス側板」を作図
[0-5(「ギアボックス側板」と名前を付けています)]を「書き込みレイヤ」にします。
半径1.5と2.5の円を止め穴の位置に作図(2ヶ所)
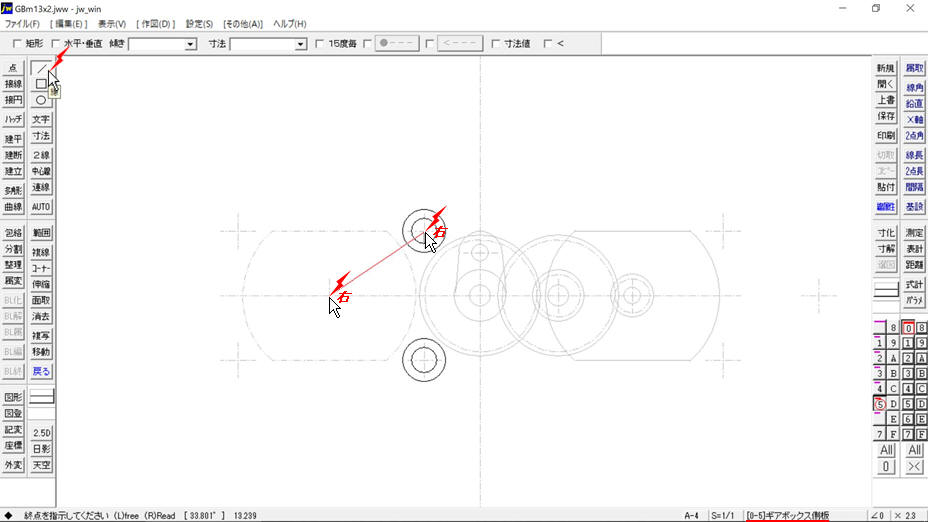
モーターをよけるため、辺をRで逃がします。
図では、モーター取付位置のセンターから止め穴のセンターへ直線を引いて、次の操作の準備をしています。
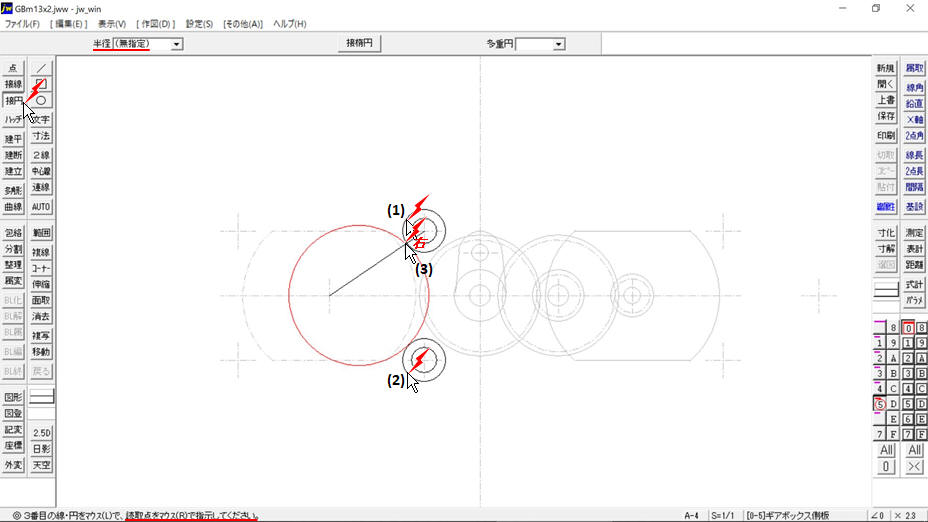
■ 「接円」
(1)「1番目の線・円をマウス(L)で、…指示してください。」 (2)「○2番目の線・円をマウス(L)で、…指示してください。」
図のように、描きたい「接円」寄りでクリック
(3)「◎…、読取点をマウス(R)で指示してください。」→図の交点で右クリック
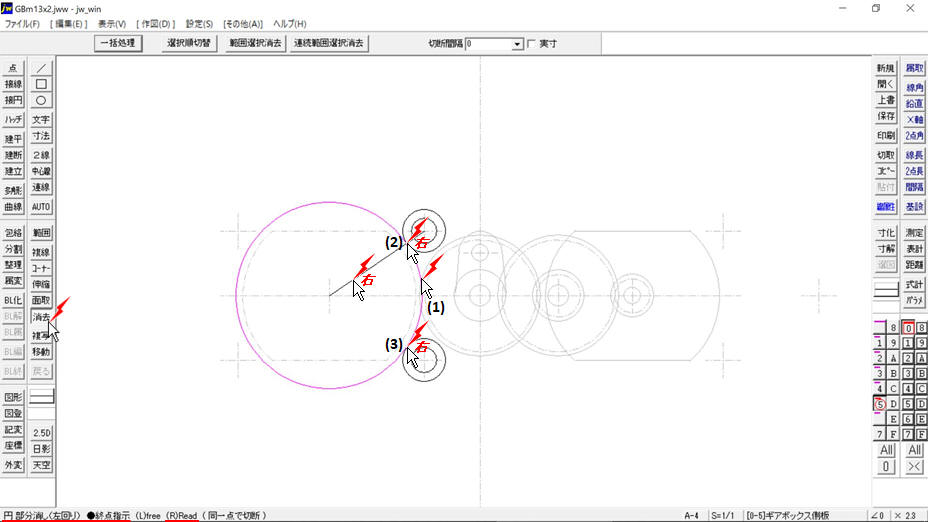
■ 「消去」
不要となった直線と、接円の一部を消去します。
「図形マウス(R)消去」→直線上で右クリック
(1)「線・円マウス(L)部分消し」 (2)「円部分消し(左回り)始点指示(R)Read」 (3)「円部分消し(左回り)●終点指示(R)Read」
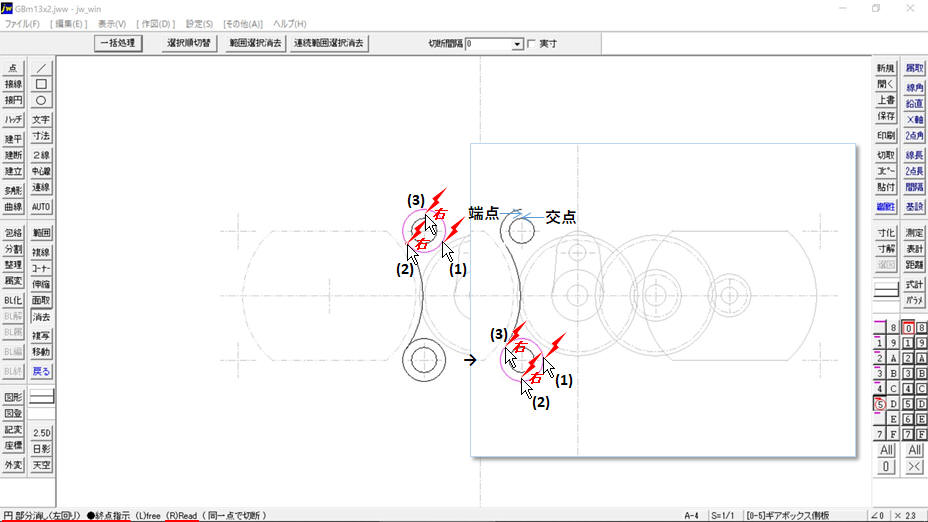
引き続き止め穴周りのRを成形します。
(1)「線・円マウス(L)部分消し」 (2)「円部分消し(左回り)始点指示(R)Read」 (3)「円部分消し(左回り)●終点指示(R)Read」 →繰り返し
円周の1/4点は、中心線の「端点」もしくは「交点」を右クリックで読み取って指示することができます。
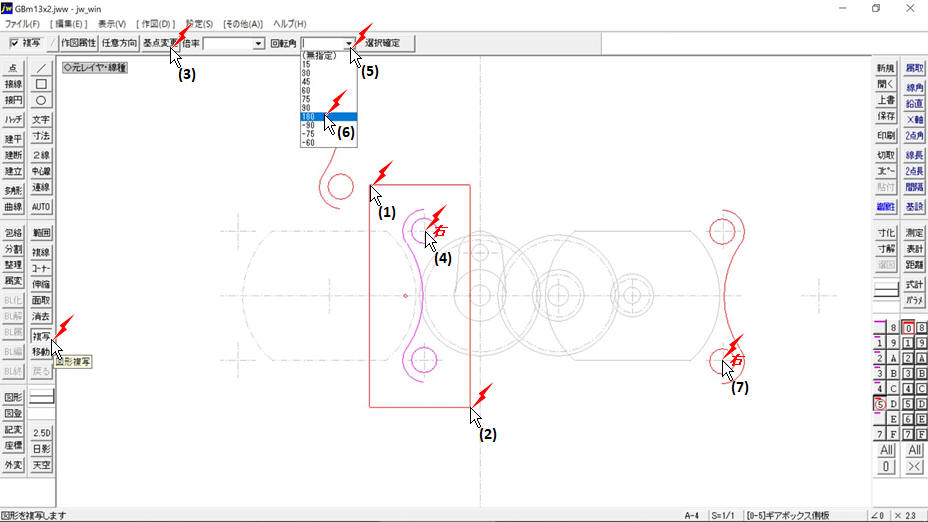
■ 「複写」
ここでは「回転複写」を行います。
(1)「範囲選択の始点をマウス(L)で、指示してください。」 (2)「選択範囲の終点を指示して下さい(L)」 (3)[基準点変更]
(4)「基準点を指示して下さい (R)Read」→止め穴のセンターを右クリック (5)[回転角▼] (6)[180]
(7)「複写先の点を指示して下さい (R)Read」→止め穴のセンターを右クリック
3DSデータの作図とインポート
3D図作成の準備をしましょう。[0-7(「3DS」と名前を付けています)]を「書き込みレイヤ」にしてください。■ 「線」
直線を4本引きます。2,3は、端点が穴のセンター(3ヶ所)を示します。
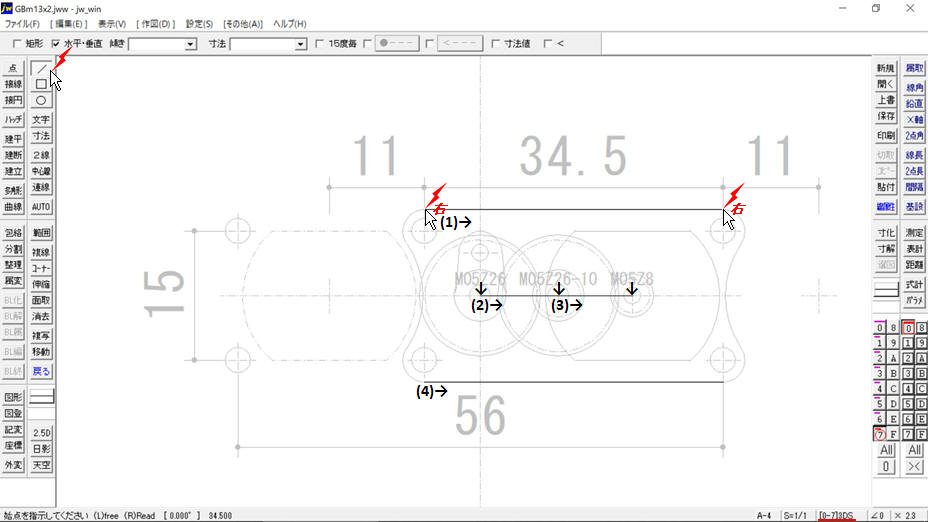
3D図で「円弧」を描くための“頂点”を示す直線を、穴のセンターと円弧の「端点」を読み取って描きます。
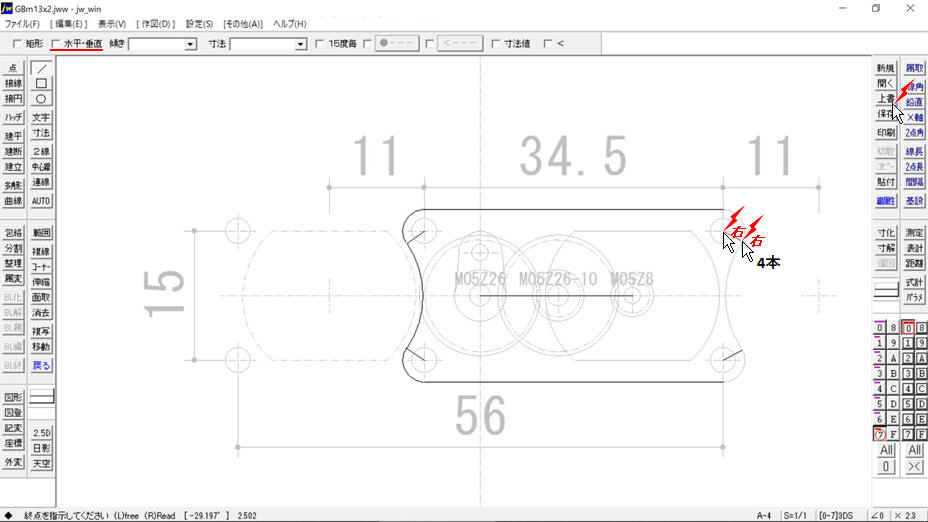
ここでは、次からの操作の説明を補足するために、R部分の一部を描いたうえで「上書き保存」しています。
書込みレイヤ[0-7(「3DS」]の図形をコピーして、新しいファイルに貼り付けます。
「範囲」全選択→「コピー」、「新規作成」→「貼り付け」
同じ名前のdxfファイルとして保存し、3DSデータを同時出力しましょう。
「名前を付けて保存」から、「新規」→名前「GBm13x2」、[保存形式dxf] で保存
3dsファイルを残し、dxf ファイルは削除しています。
SketchUp 8 を起動→保存した3DSファイル「GBm13x2.3ds」を「インポート」
描画軸と図形が現れるまで、マウスホイールを手前に回す
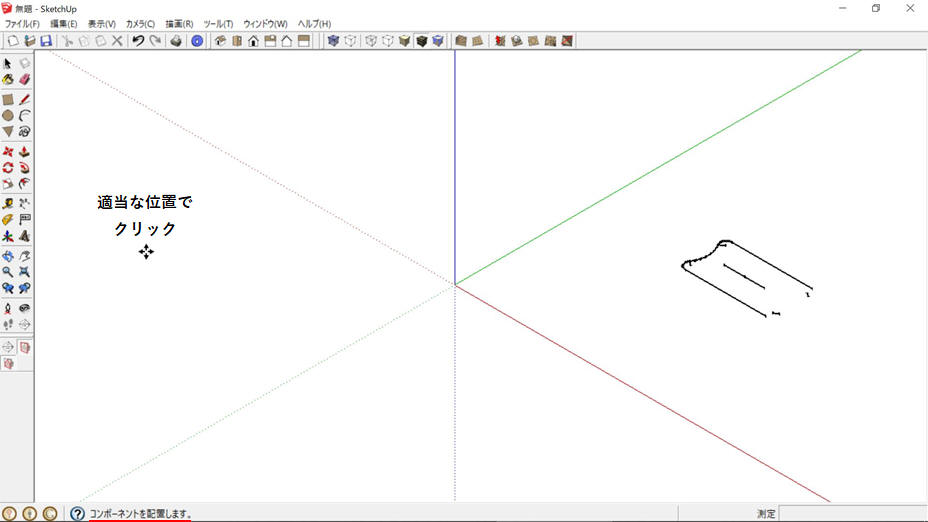
図形中央の「端点」を基点にして、「原点」へ移動→分解→再度分解(四角い枠が無くなる)
[メジャー]ツール(寸法を計測後、実寸34.5を入力)で「モデルのサイズを変更しますか?[はい]」
■ 円弧
(1)「始点を選択」端点をクリック (2)「頂点で接する」端点をクリック→色付きの円弧が仮表示された状態で再度クリック
次の操作では直線を消去して、作図した円弧の端点をクリックしています。
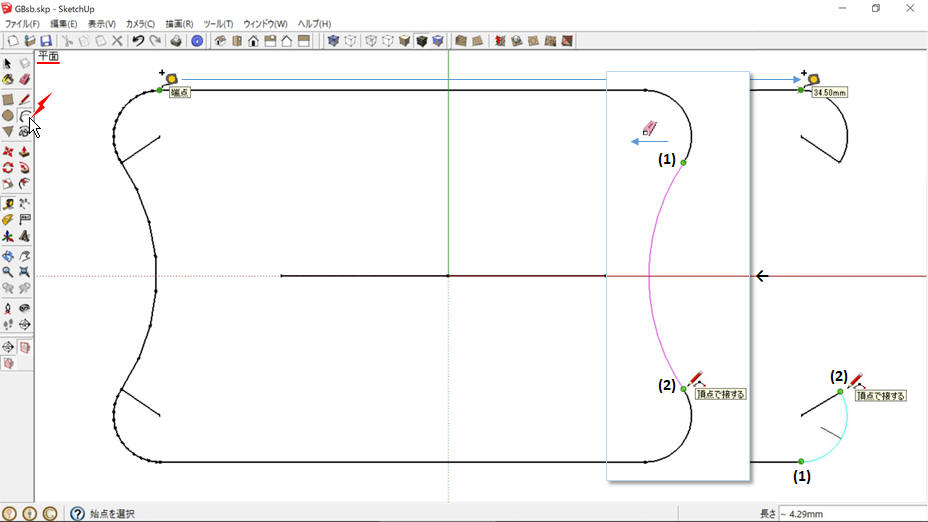
3DSデータからインポートした円弧は、直線の集まりとして表示されます。ここでは図のように描きなおしています。
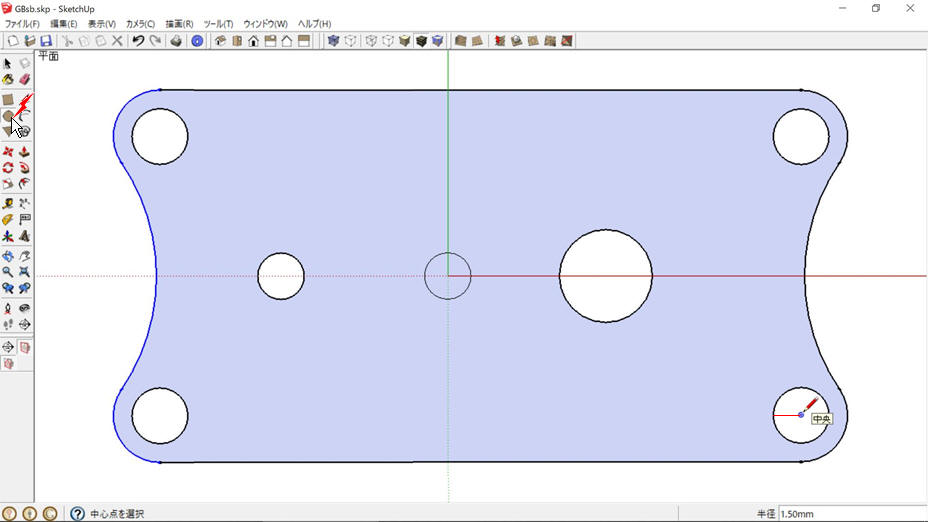
止め穴のセンターは、外周から推定しています。
2mm透明アクリル板からレーザーカット(軸穴1ヶ所ザグリ後加工)する単品図「GBsb.skp」として、保存しています。
3D_CADで仮組、検討
「ギアボックス側板」を組立図に組み込んでいます。操作手順は「アクリルロボット 全体組立」参照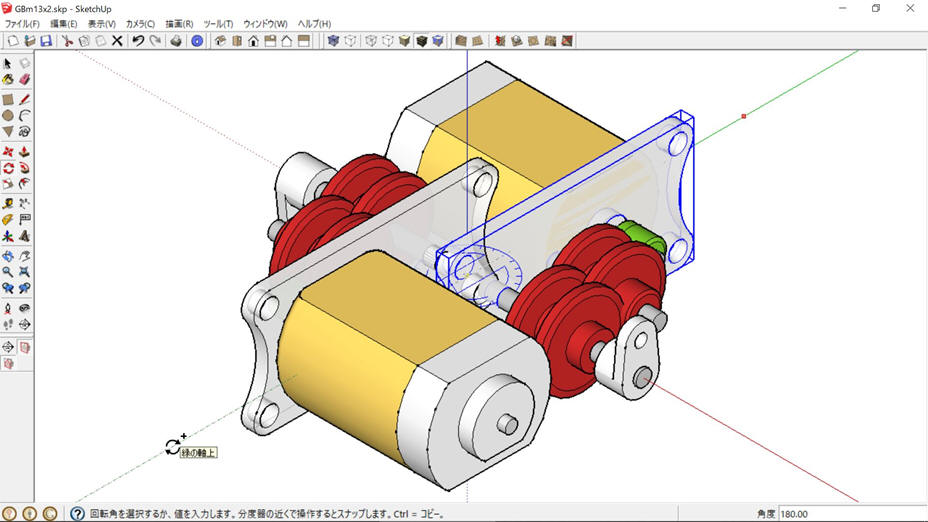
「ボディ側板」
共通部品の足「8003A-0001-01.skp」を仮組して、寸法や形状を検討します。
クランクを回して、足を上限と下限に配置します。
従動する足の軸(M2ナベ)の頭が、モーターと干渉しないよう配置しています。
■ [メジャー]ツール
必要な寸法を、補助線を引いて計測しています。
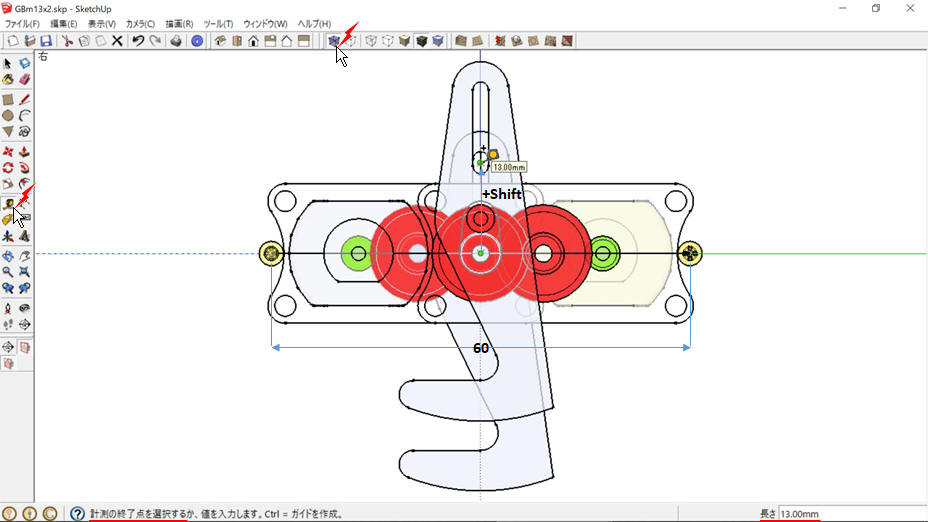
図では、[Shift]キーを押し(推定機能をロックし)ながら計測しています。
「ボディ側板」を作図
[0-6(「ボディ側板」と名前を付けています)]を「書き込みレイヤ」にします。
穴のセンター(7ヶ所)を中心点とする「円(半径2.5)」を「線」と「接線」及び「接円(半径3)」でつなぎ、外形を描いています。
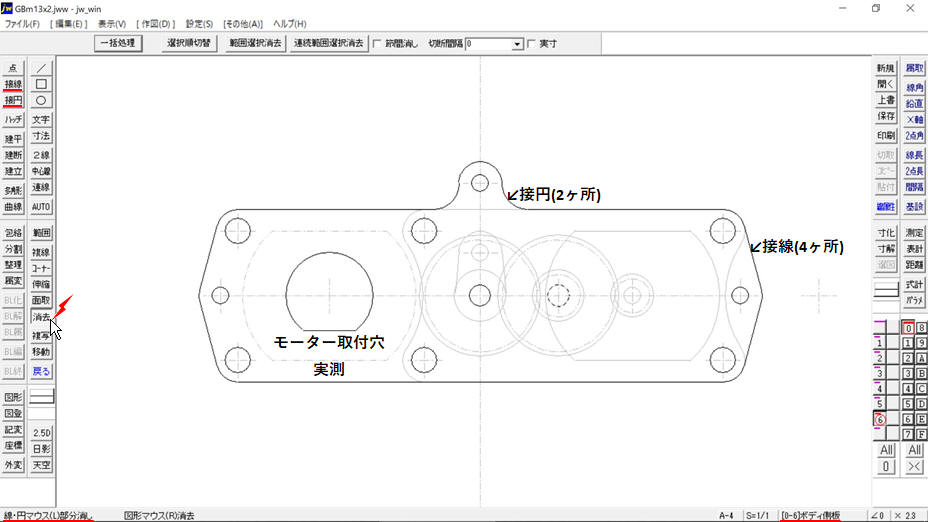
「消去」の「…部分消し」で形を整えます。
3DSデータの作図とインポートを行います。[0-8(「3DSbsb」と名前を付けています)]を「書き込みレイヤ」にしてください。
ボディ側板外形の直線をなぞります。上の2本は半円の「端点」で、3D図で「円弧」を描くための“頂点”を示します。
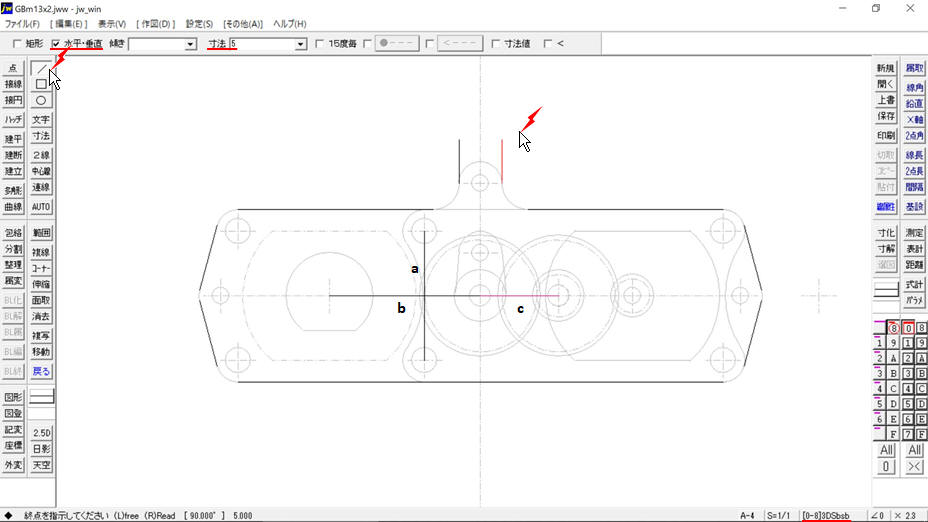
直線a~cは、端点が穴のセンター(5ヶ所)を示します。
ここまで描き終えて「上書(保存)」します。→2D_CADファイル「GBm13x2.jww」
3DSデータの出力
「書き込みレイヤ[0-8]3DSbsb」のみ「編集可能」とし[範囲]→[全選択]→[コピー]、[ファイル]→[新規作成]→[貼付]
[ファイル]→[名前を付けて保存]→保存先を選択(ここでは、Jw_cad のインストール先のフォルダ)→[新規]→「保存形式[dxf]」
コピー元をWebから直接開いているので、保存先が「 インターネット一時ファイル」になっています。図のように変更しましょう。
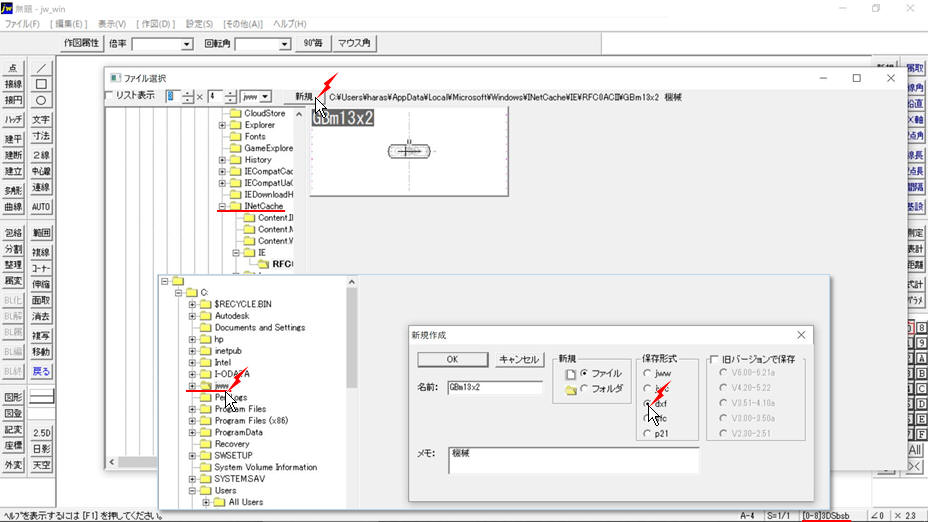
ディレクトリーがツリー構造で表示されています。当方では、ファイル管理はWindowsのエクスプローラーで行っています。
同一フォルダに作成された3DSファイル「GBm13x2.3ds」を、SketchUp 8 の新規ファイルにインポートします。
2mmアクリル板加工品として描き、完成した3D_CAD図を「ボディ側板」単品図「GBbsb.skp」として保存しています。
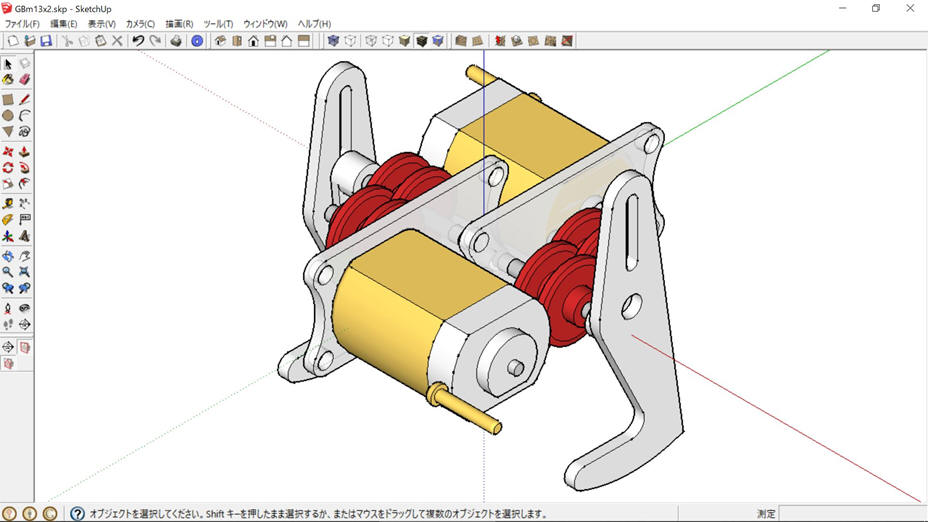
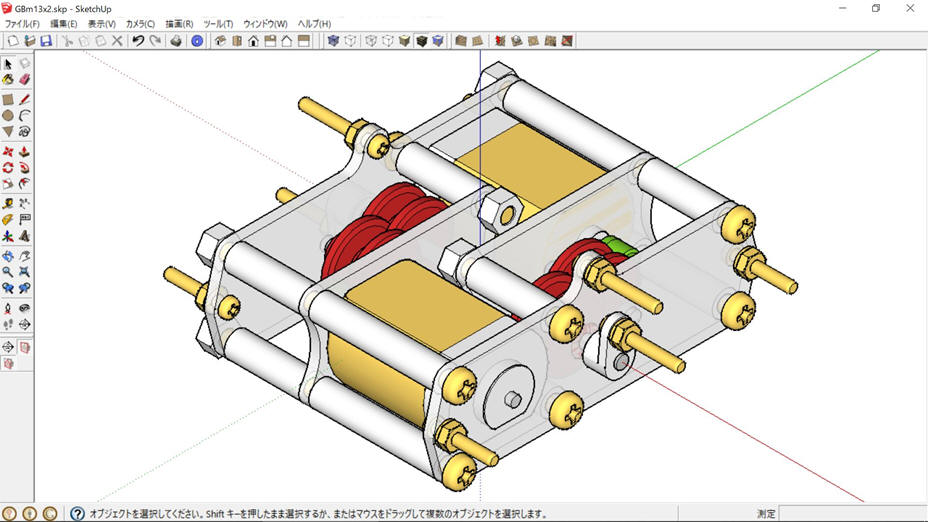
組立図に「コピー&ペースト」、「回転(複写)」
完成した組立図を、汎用動力ユニット「GBm13x2.skp」として保存しています。
[戻る↑]
合志市栄のマイファブラボ SAKAEPC ものづくりサポートCAD講座 [目次へ] [←前へ][次へ→]