合志市栄のマイファブラボ SAKAEPC
ものづくりサポートCAD講座
SketchUp 8 で3Dプリンターを動かす
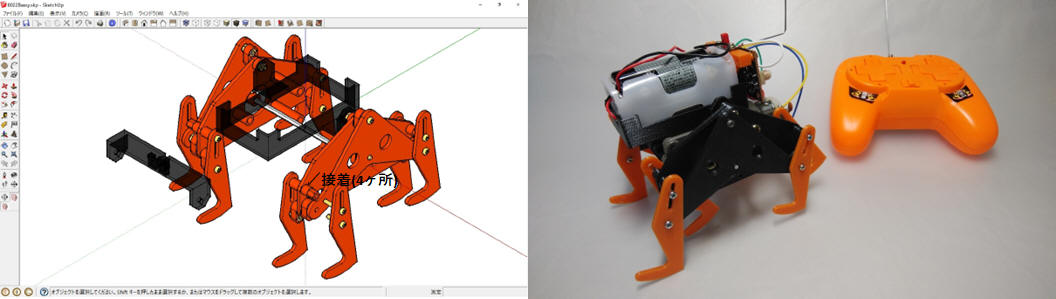
「PLAロボット」の工作 2・・・ラジコン化計画
[進む↓]
トイラジコン送受信機セット(受信機は基板のみ)を使用、ジャンクのモータ以外は市販品
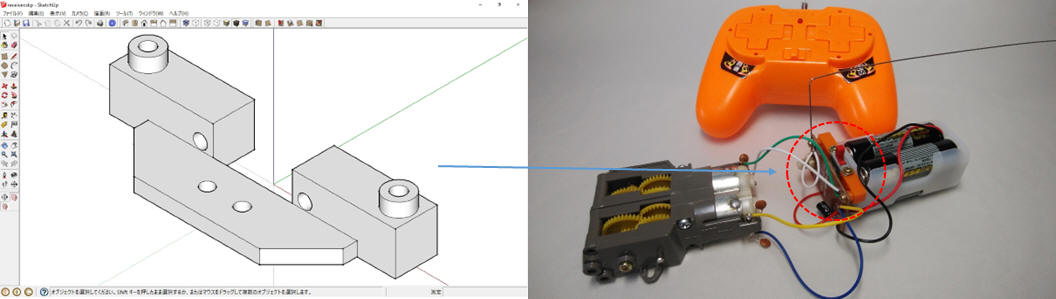
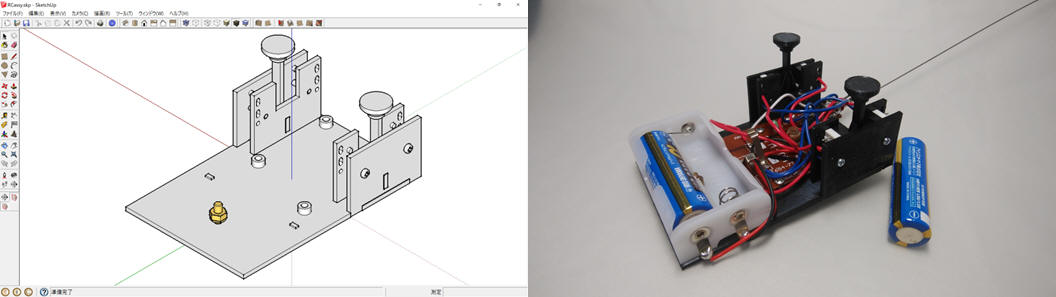
電池ボックスに基板を取り付ける部品[receiver.skp]を3D印刷
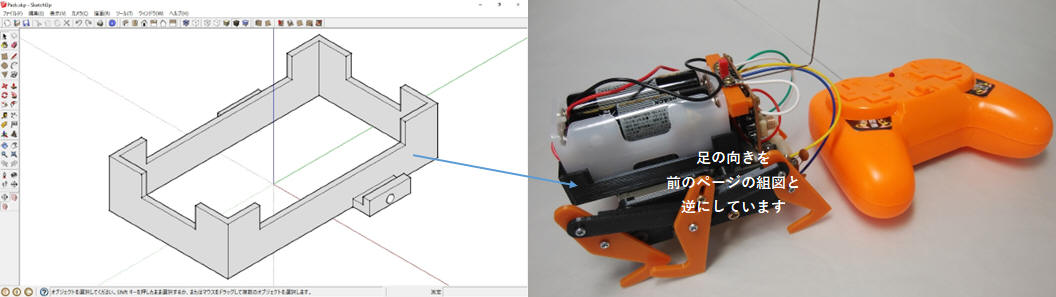
受信機の取り付けは背負子[Pack.skp]にして、モーターとセットで着脱
27mhzラジコン装置(モーターを含む)を他のタイプと共用しています。
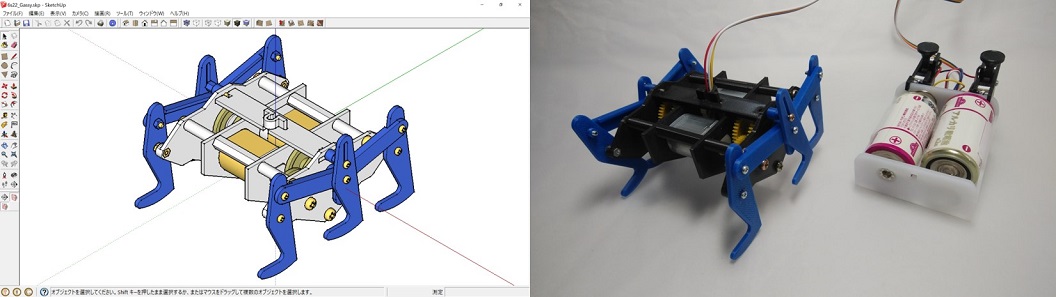
三角リンク板Aタイプ[8022Aassy.skp]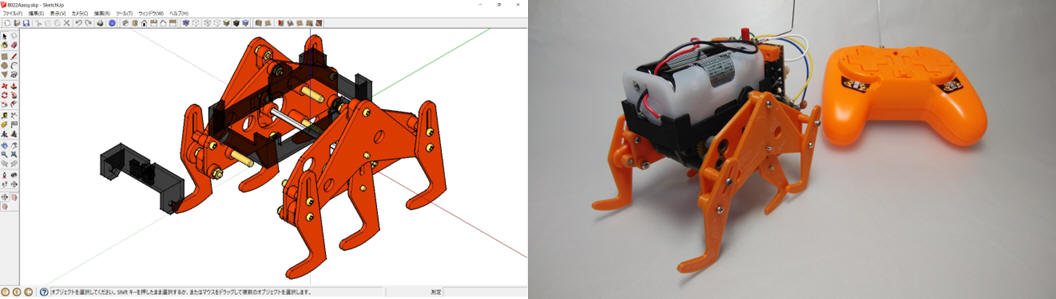
「組図」から3D印刷する部品を一括で選択する
二つ以上[選択]→右クリック「選択[同一マテリアルのものすべて]」
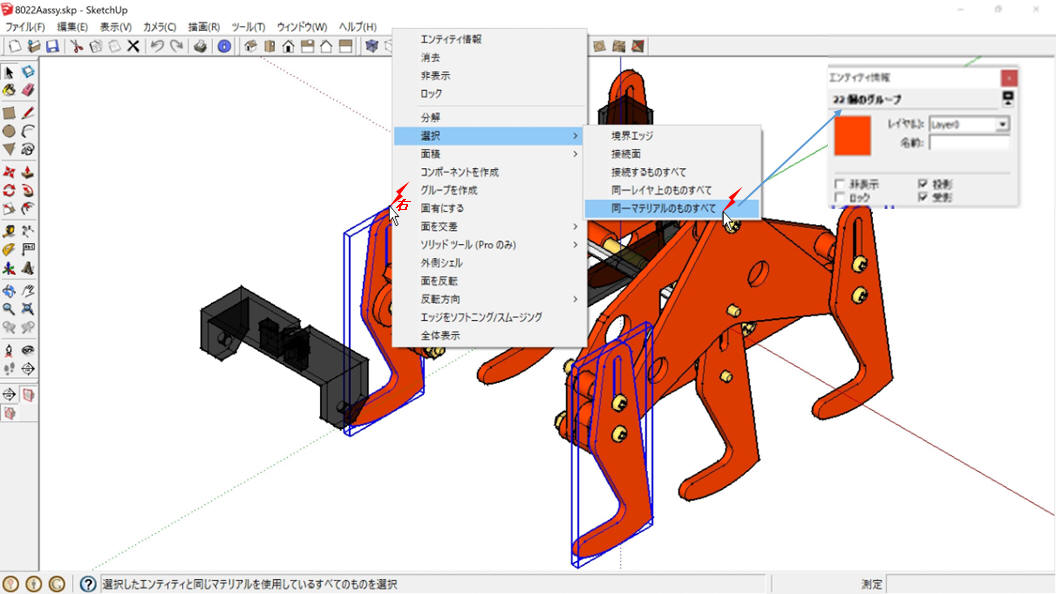
[コピー/貼り付け]で印刷用のファイルを作成してください。
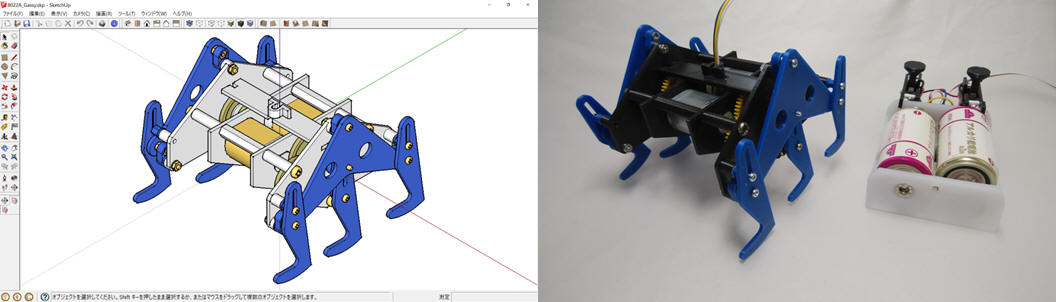
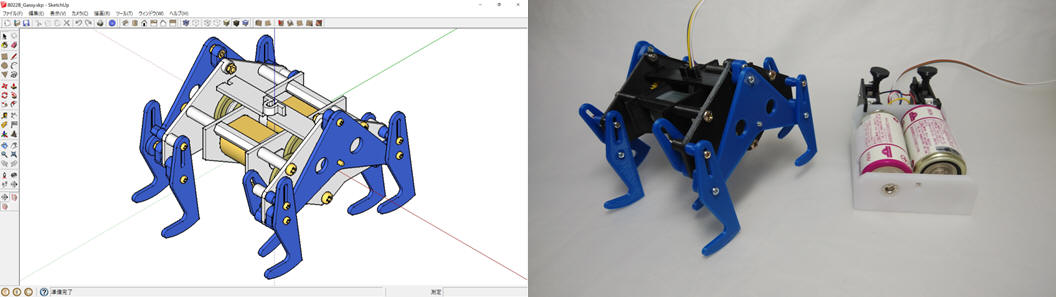
三角リンク板Bタイプ(8本足)[8022Bassy.skp]
「PLAロボット」ラジコン化の動画
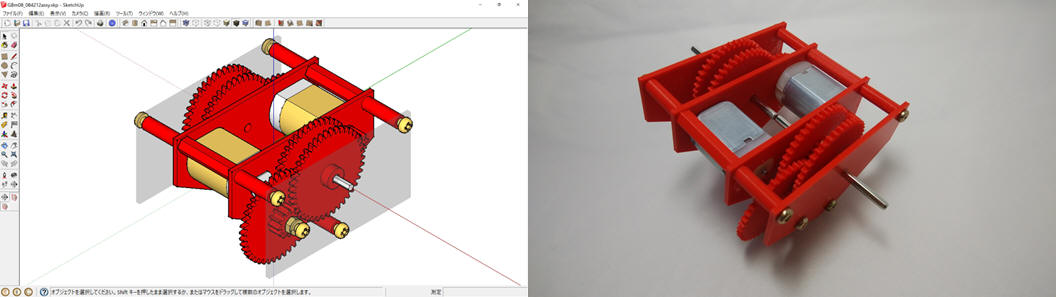
余ったギアを使った「汎用動力ユニット」
「市販の駆動模型ギアボックス」3台から1台作りました。
伝達用ギアを出力ギアに改造
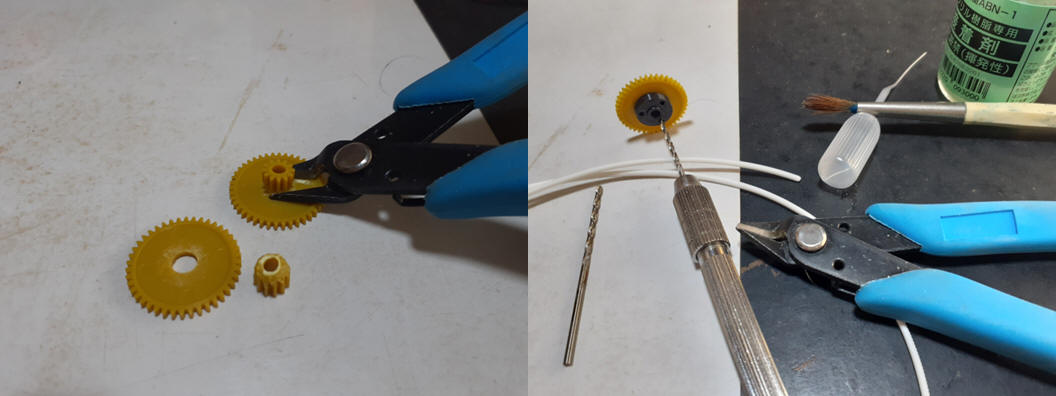
「Ender-3」付属のニッパー(=^x^;=)で切り取っています。3D印刷した部品で挟み、ピン(PLAフィラメント)を入れ接着
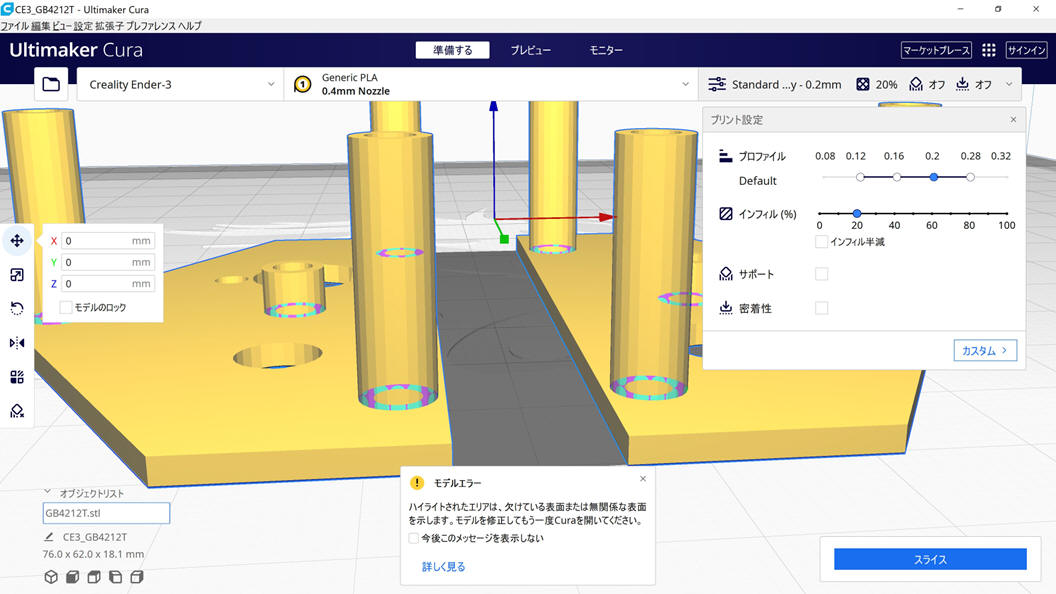
3Dプリントデータ[G42T.skp]
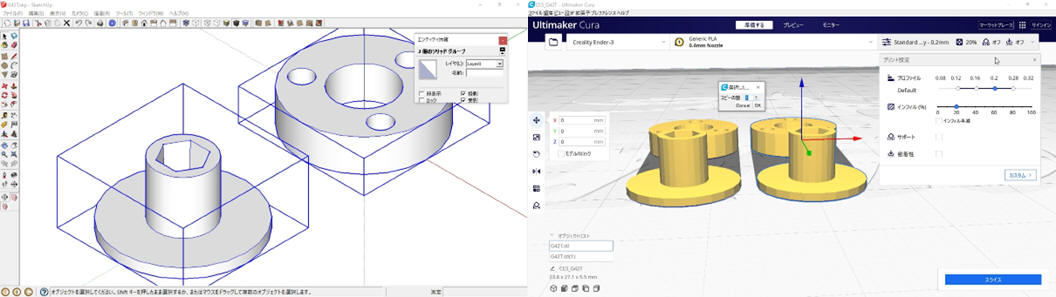
「CURA」で「…増倍」、1台(2組)
組図[GB4212Tassy.skp]
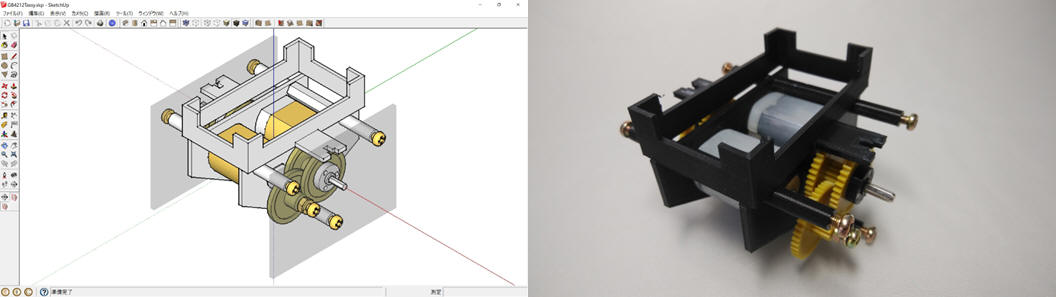
軸間距離を0.25mm広げ、出力軸を中央にしています。
M3六角スペーサー
「CURA」で「…増倍」、「密着性[ON]」
「モデルエラー」が表示されましたが、この場合(パイプと板の接触面)問題なく印刷されます。
3タイプ作成(有線)
歯車を3Dプリンターで印刷
ギアを遣り繰りするためにPLAで作りましょう。SketchUpのプラグイン「Involute Gears」をインストールしています。
[m05z12-42.skp]
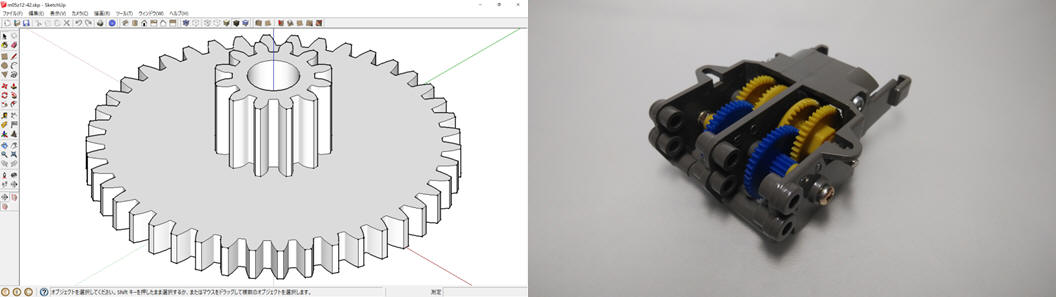
「42T/12T GEAR」を複製
「SU
Plugins 無償プラグインページ | SketchUp」から
[Involute
Gears]→ここでは[Zipした.rbzをダウンロード]
「SketchUp 8」を開き
[ウインドウ]→[環境設定]→「システム環境設定[機能拡張]→[拡張機能をインストール]」
「展開」した「Cadalog_Gear_v3.1.rbz」を[開く]→「…このプラグインをインストールしますか?[はい]」
ユーザー
アカウント制御「このアプリがデバイスに変更を加えることを許可しますか?[はい]」
「拡張機能のインストールが完了しました。[OK]」→[OK]
「プラグイン ダウンロード」の手順は前ページでも解説しています。
「描画ツール」から[Involute Gears]と[Key Involute Gears]が使えるようになりました。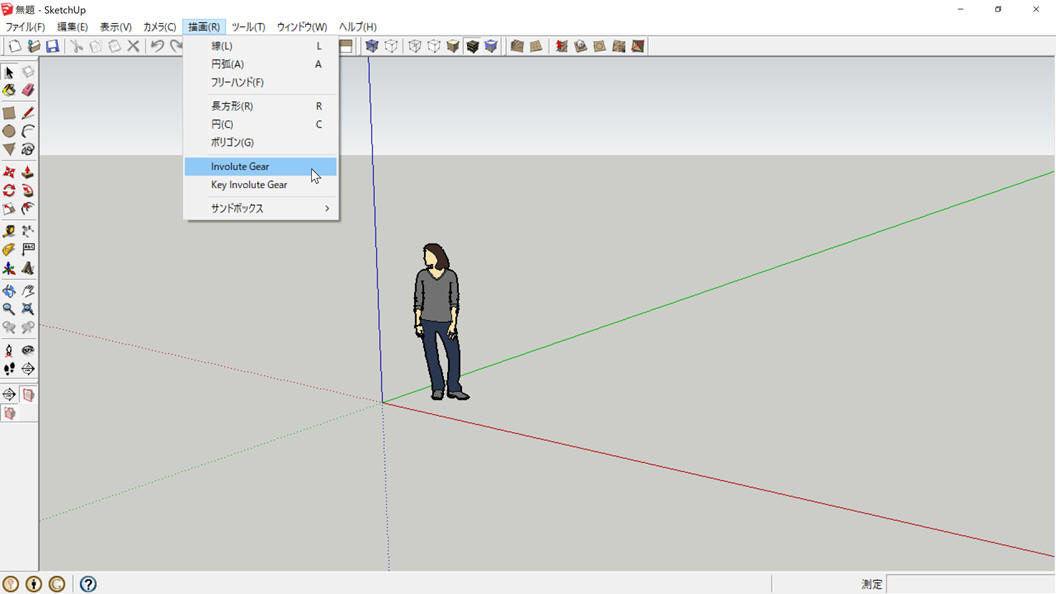
駆動模型設計用のテンプレート[SAKAEPC_kikai.skp]で作業を進めています。
[描画]→[Involute Gear]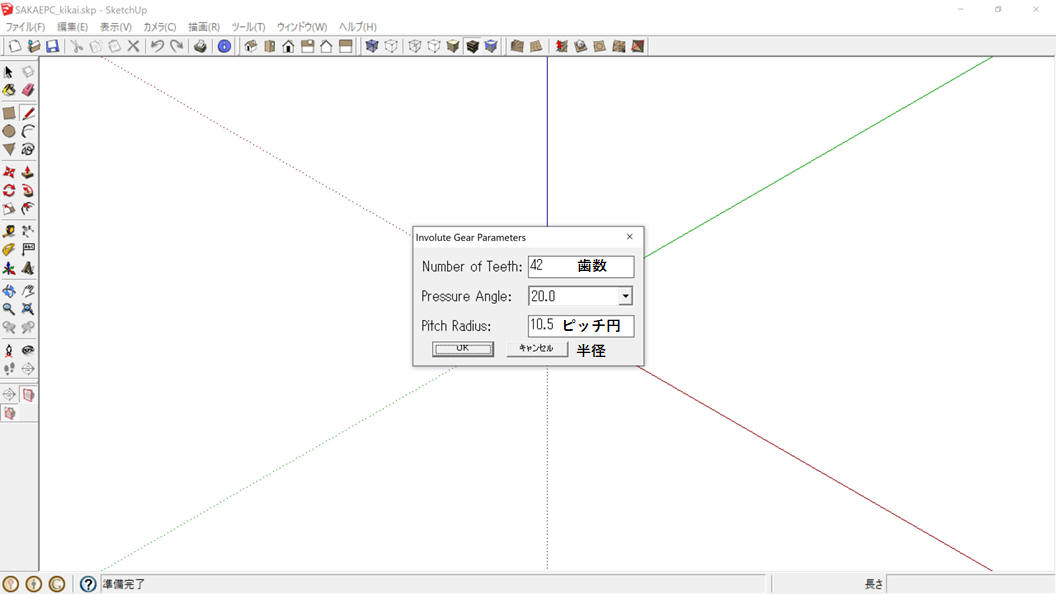
パラメーターとして「歯数」と「ピッチ円半径(モジュール0.5×歯数÷2)」を入力
「原点」を中心とする「グループ」が描画される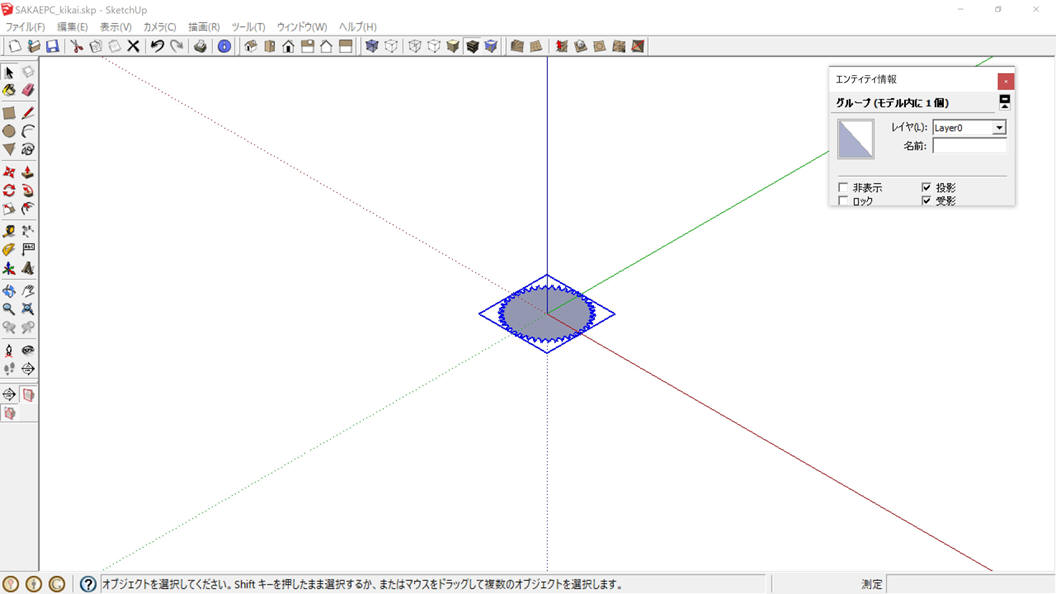
[分解]→[プッシュ/プル(ここでは下へ)]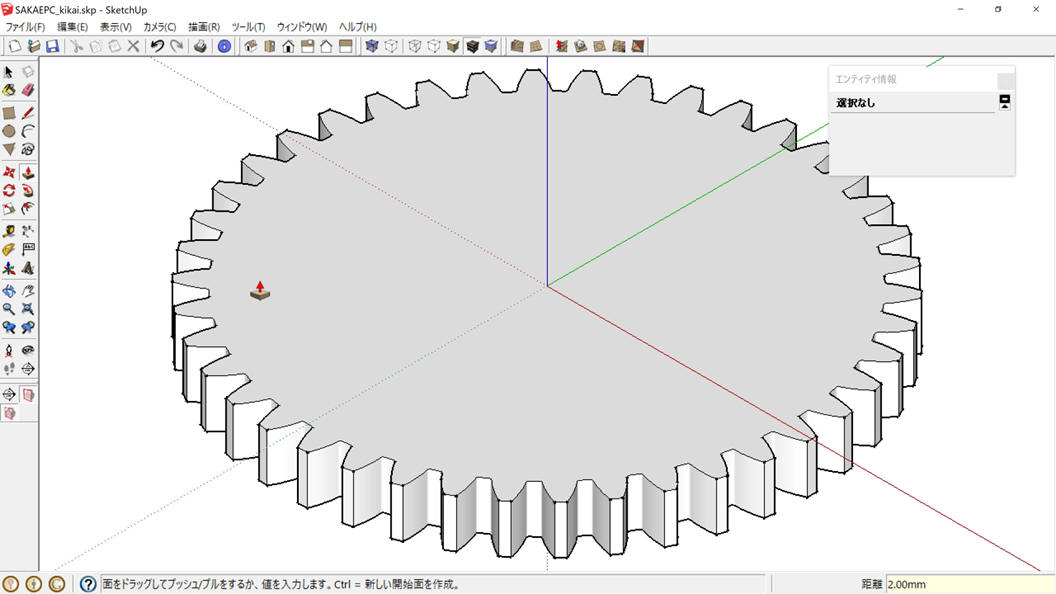
もう一段[描画]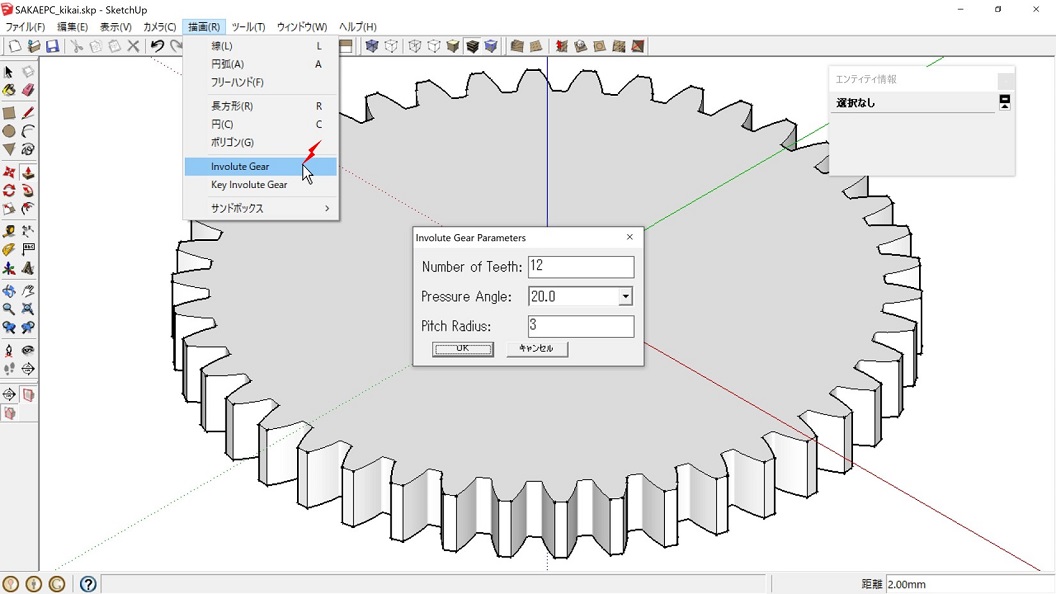
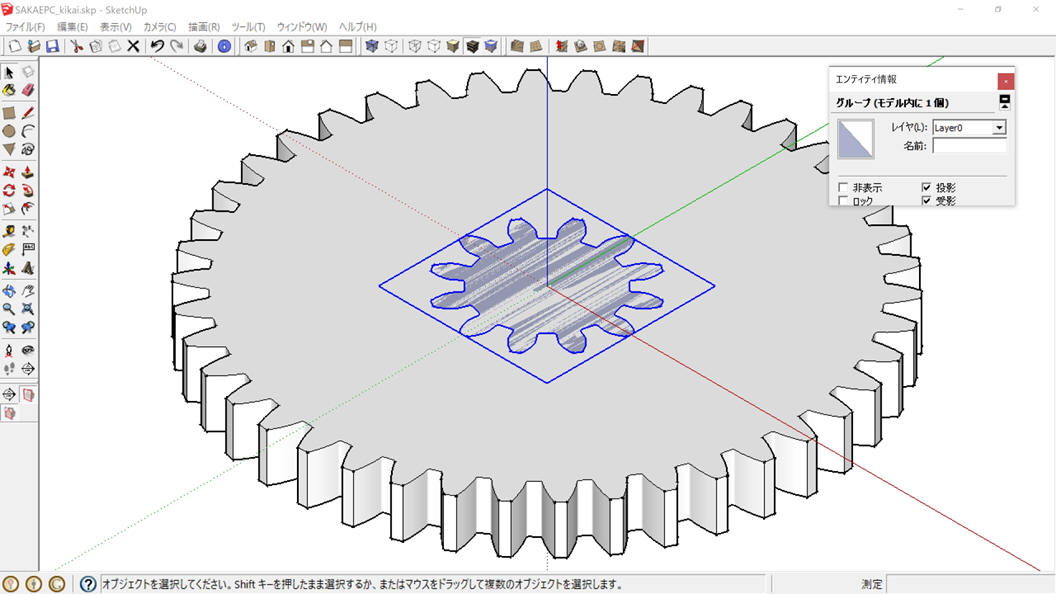
[分解]→[プッシュ/プル(上へ)]→「軸穴」を通して保存[m05z12-42.skp]
1台分2個を3Dプリント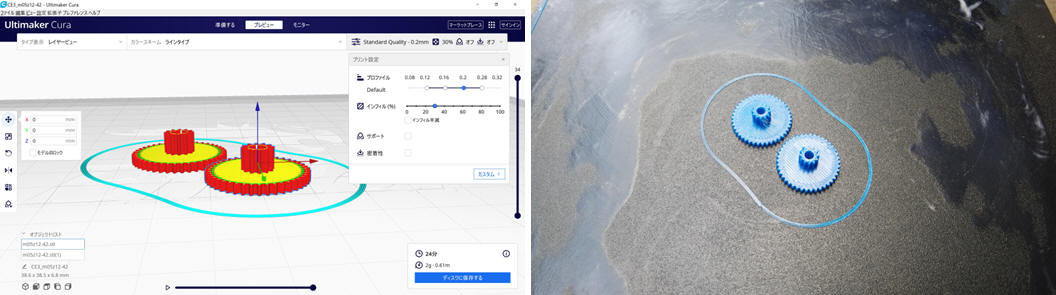
モジュール0.5では歯先がつぶれ「伝達効率」が低下しそうなので、市販のギアボックスの1段のみに使用しました。

モジュール0.8の歯車を3Dプリンターで印刷
ここで扱う「PLAギア」の実用的サイズを探っています。
「Pressure Angle(圧力角)」:20°
「Pitch Radius(ピッチ円半径)」=「モジュール(0.8)」×「歯数」÷2
→ 「モジュール(0.5)」の1.6倍
「バックラッシュ(アソビ)」も参考製品の1.6倍(0.25mm×1.6=0.4)にしています。
[GBm08_084212assy.skp]
ギアが大きくなってレイアウトが窮屈になりました。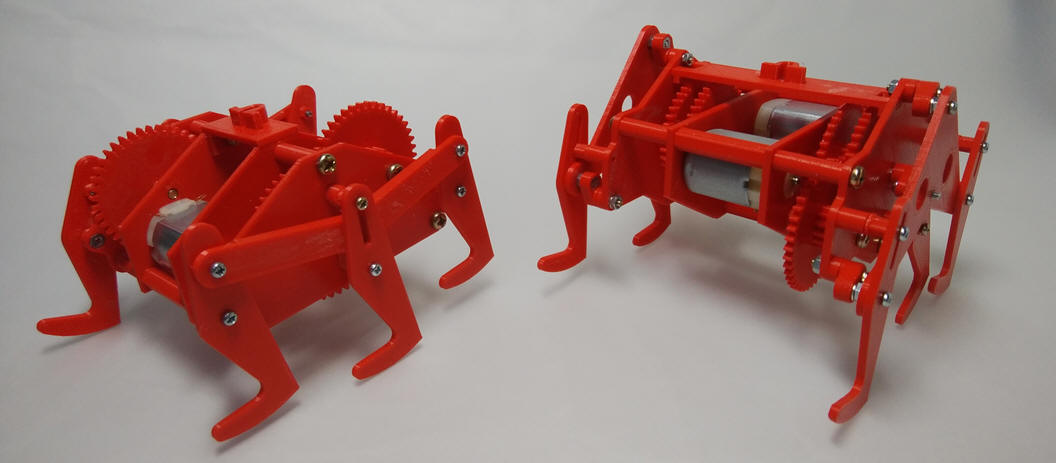
リモコン(有線)2タイプ製作
[6s22_08_084212.skp]、[8022_08_084212.skp]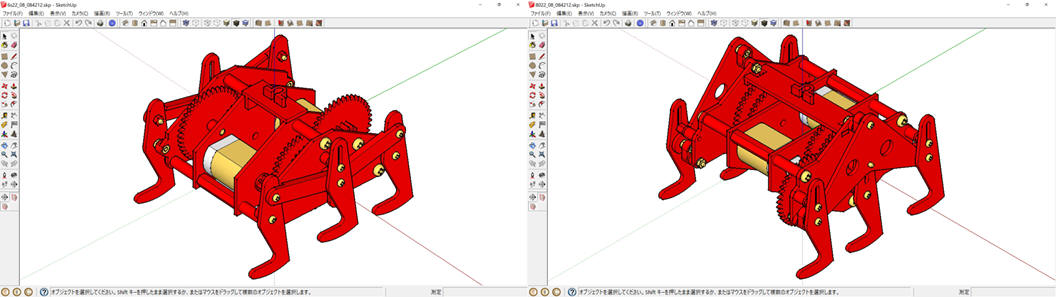
モジュール0.75!の歯車を3Dプリンターで印刷
3Dプリンターを使って、規格外の歯車も手軽に作ることができます。
「Pitch Radius(ピッチ円半径)」=「モジュール(0.75)」×「歯数」÷2 → 「モジュール(0.5)」の1.5倍
歯車の軸間距離からモジュールを逆算
3Dプリンターで自由に歯車を作ることができるので、動力伝達機構をリンクから歯車に変えてみました。
m・42/2+m・12/2=71.5/4 軸間距離(71.5mm)は当初の設計を踏襲しています。
モジュール:m≒0.66 →0.64(バックラッシュをとるために歯車を小さくしている)
[6Sm064_084212.skp] 6本足
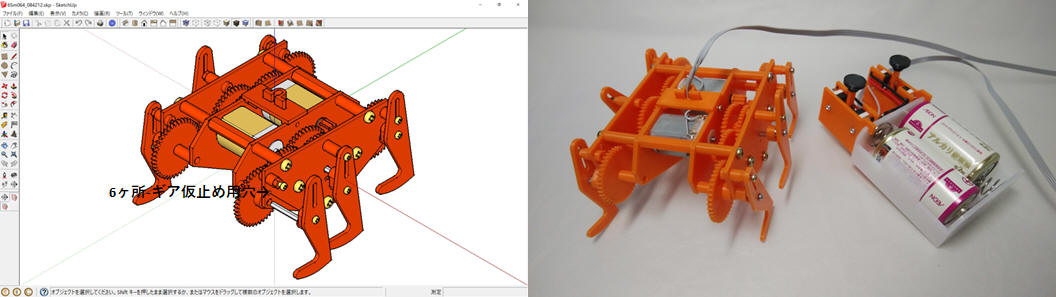
組立時、歯車の位相を合わせるための「仮止め用穴」を設けています。
[8Sm064_084212.skp] 8本足←更新20220714
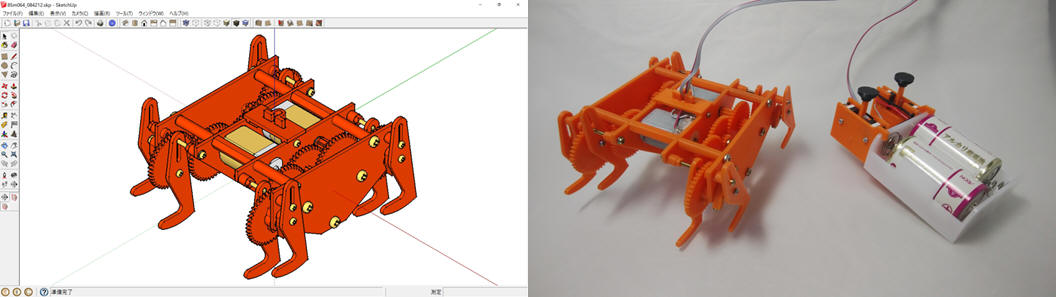
ギアにピン(m2小ネジ)を刺して「クランク」にしています。
比較のため、モジュール0.8の歯車でも同機構で試作
[6Sm08_084212.skp]
6本足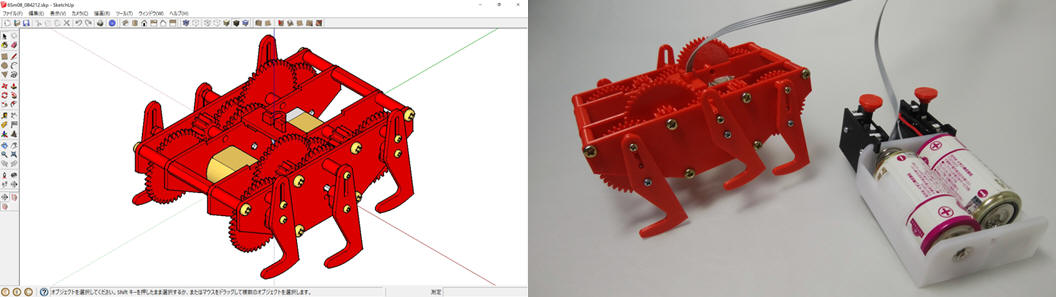
ギアの配置を変えてみました。
「軸間距離から逆算」 m・42/2+m・12/2=19.02(実測値) モジュール:m≒0.7
→0.68
[6Sm068B_084212.skp]
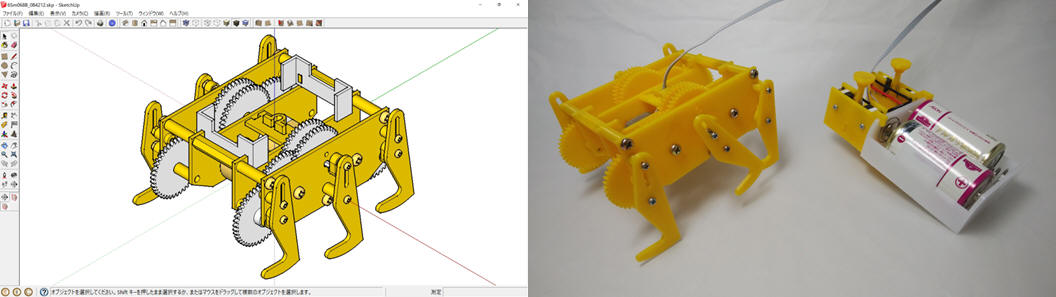
上下動が安定する分、スピードが落ちました。
モジュール0.64のPLAギアでPLAロボットラジコン化
歯数8のPLA製ギアを3Dプリンターで作るには、当方の環境ではこの辺が(伝達効率のうえで)限界のようです。
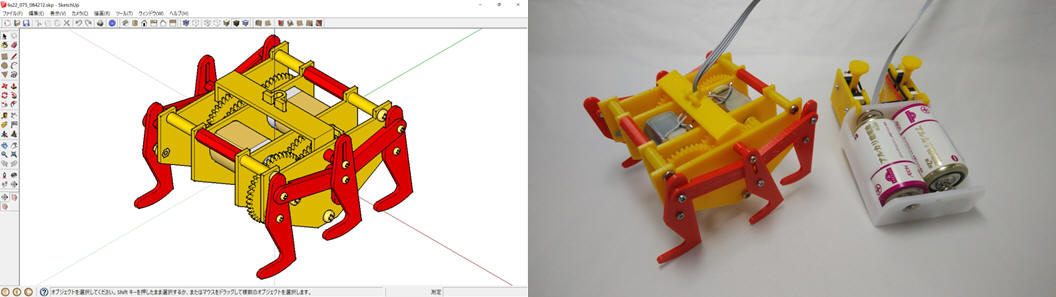
市販のトイラジコン送受信機(基板のみ)セットから
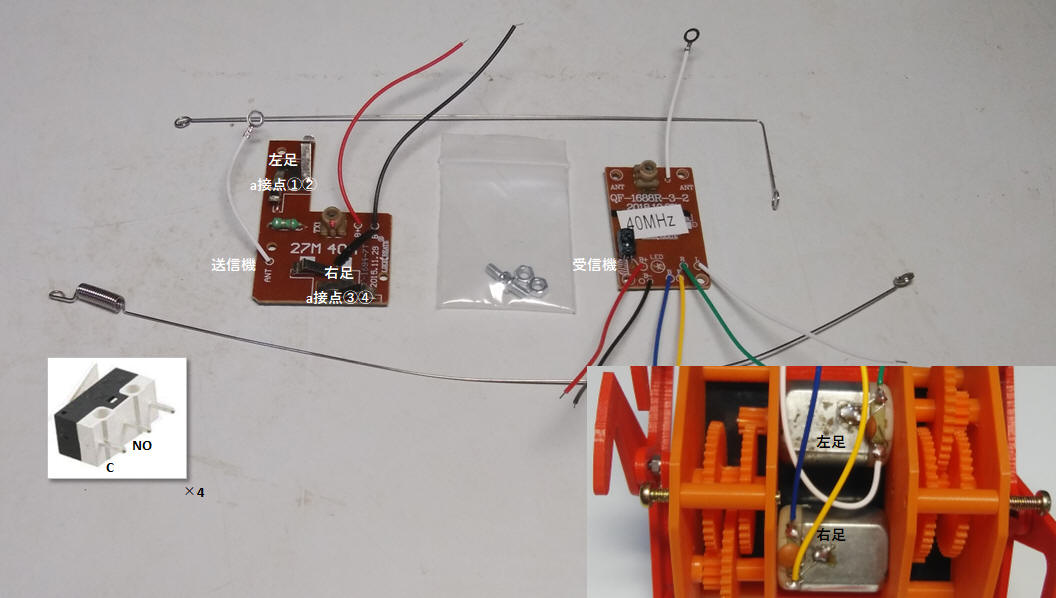
モーターはジャンク品
2chラジコン送信機[RCassy.skp]
基板のa接点をマイクロスイッチに置き換え、電源スイッチ無し
[6S22m064RC.skp]
6本足ラジコンPLAロボット(40MHz)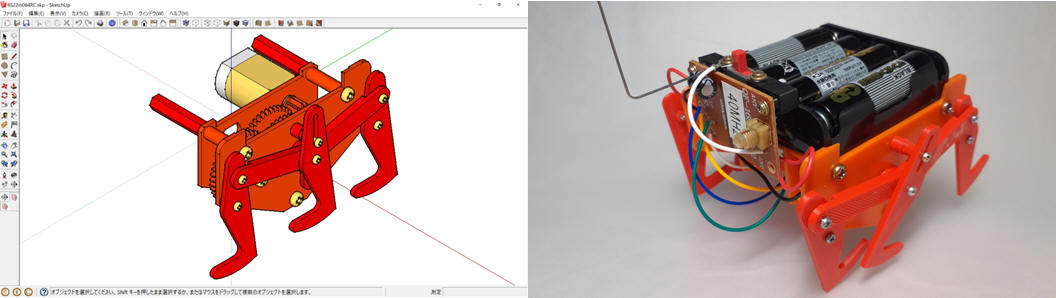
電池ボックスに直接、基板とスイッチをPLA製部品で取り付けています。
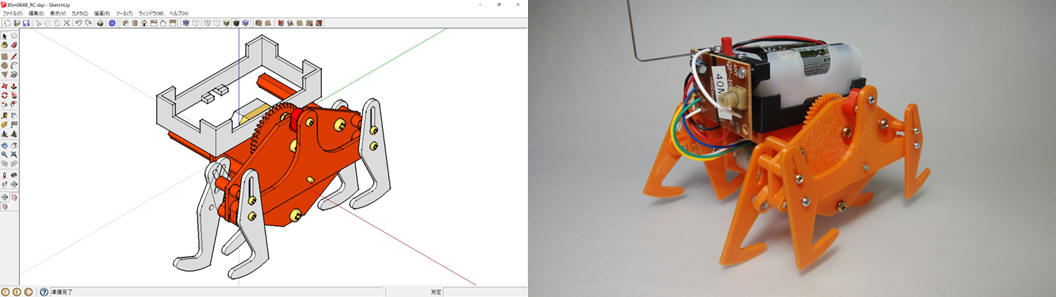
[8Sm064B_RC.skp] 8本足ラジコンPLAロボット(40MHz
送信機共用)
市販のトイラジコン送受信機セットで3バンドそろいました。
27MHz、40MHz、2.4GHz
印刷精度を上げてモジュール0.5の歯車に挑戦
ノズル交換
標準の穴径0.4mmから0.2mm(別途購入)に交換しました。
m0.5 ピニオンギア 歯数8 [m05z8x16.skp]
一度に16個作っています。個数が少ないと熱が蓄積され変形してしまいました。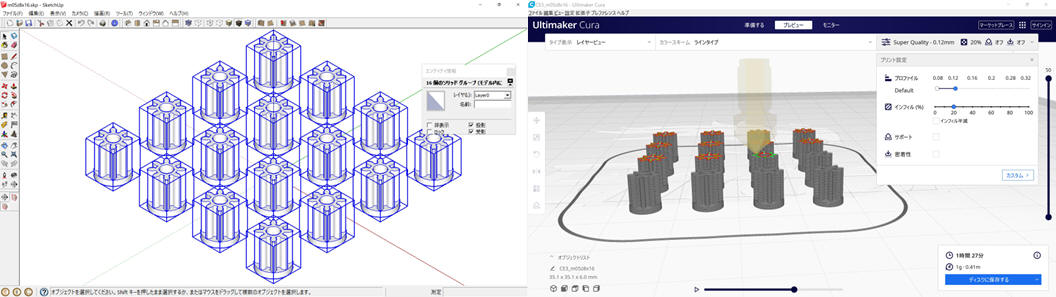
「Cura」のメニューバーから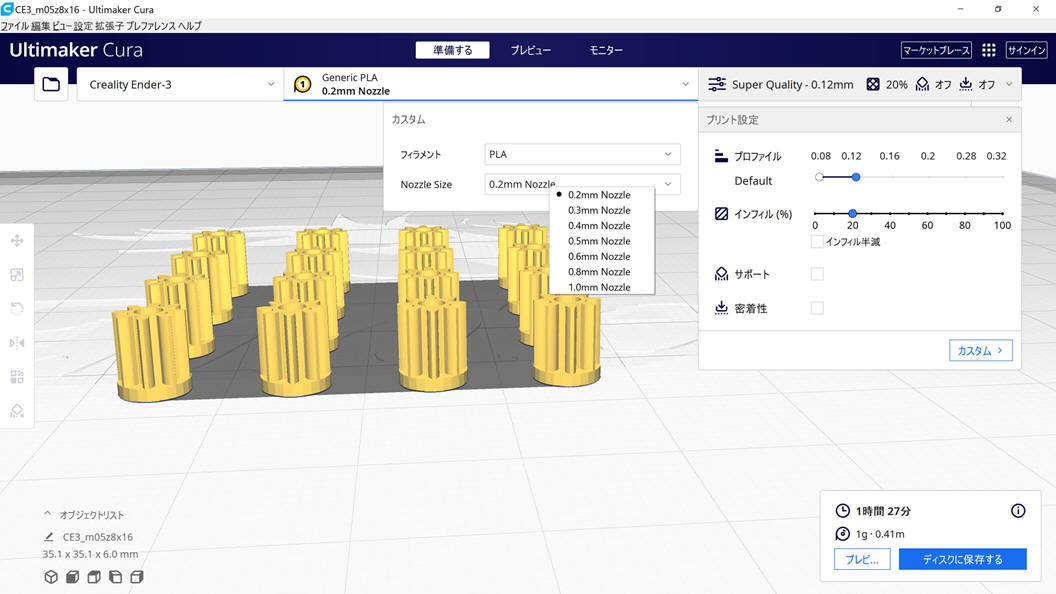
「Nozzle
Size[0.2mm Nozzle]」
市販のギアボックスと融通しています。
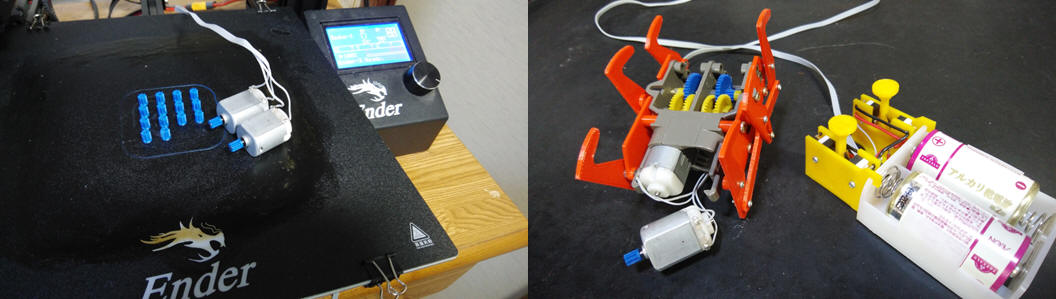
「ピニオンギア」モーター軸に圧入(しまりばめ:インフィル 20%)、インフィル密度を上げ過ぎると圧入時に割れやすくなる
[6Sm05.skp]有線、無線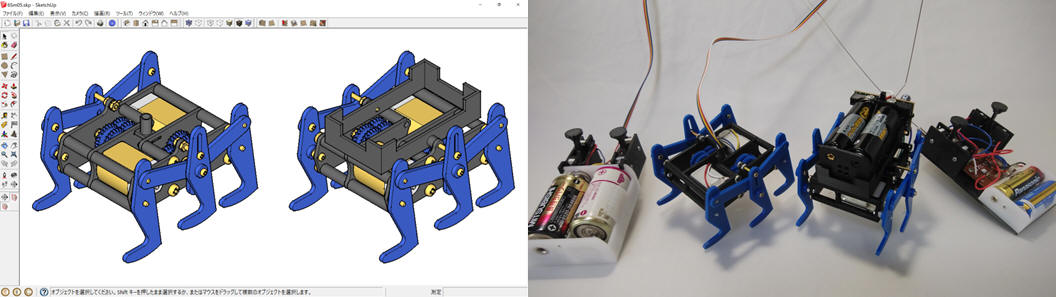
タミヤの六角シャフト使用、歯車は全て 0.2mm Nozzle
[戻る↑]
3Dプリント同好会
3D Print club
メンバー募集中
合志市栄のマイファブラボ SAKAEPC ものづくりサポートCAD講座 [目次へ] [←前へ][次へ→]