合志市栄のマイファブラボ SAKAEPC
ものづくりサポートCAD講座
SketchUp 8 で3Dプリンターを動かす
「PLAロボット」の工作・・・「機械設計支援ツール」としての用法を探る
[進む↓]
当初(1980年設計=^x^;=)は主要部品を2mmアクリル板から機械彫刻機で切り抜いて作りました。

左端↑は2chラジコンサーボ(動力用に改造)を直に挟んだ「タランチュラ」の残骸
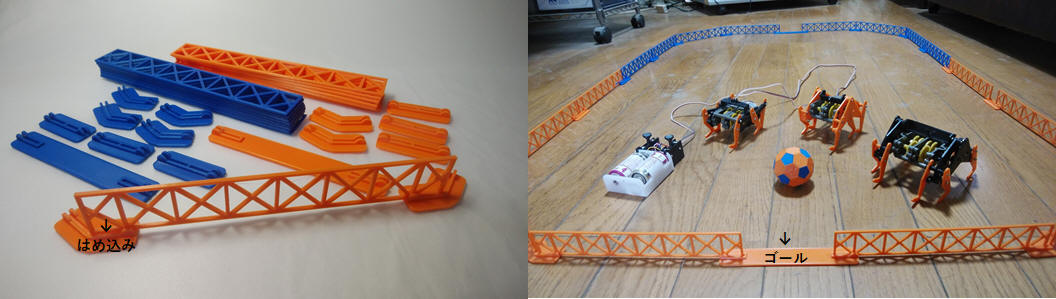
これからは、3Dプリンターを使いPLAで作りましょう。アクリルロボットならぬ?PLAロボット!
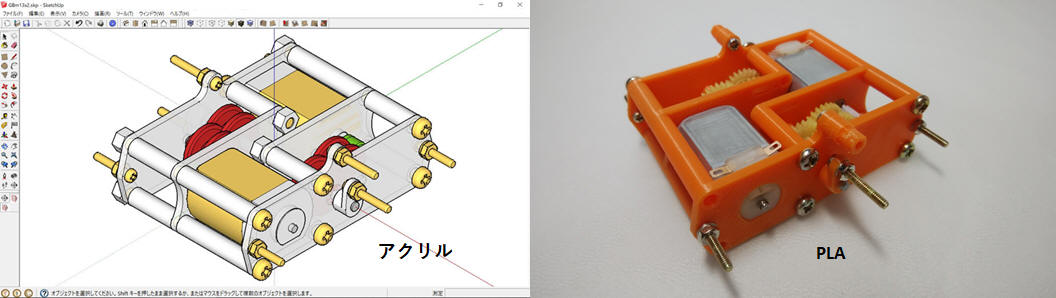
印刷時の配置など、全てSketchUp 8 で編集しています。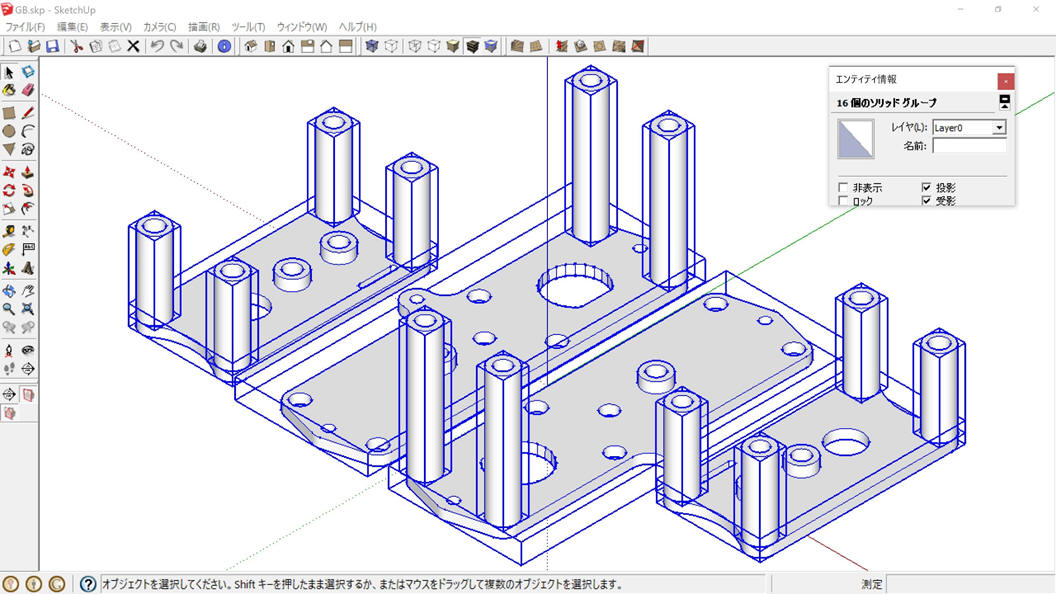
stl変換
ここでは、「SketchUp STL」を置いた「ダウンロード」フォルダに保存しています。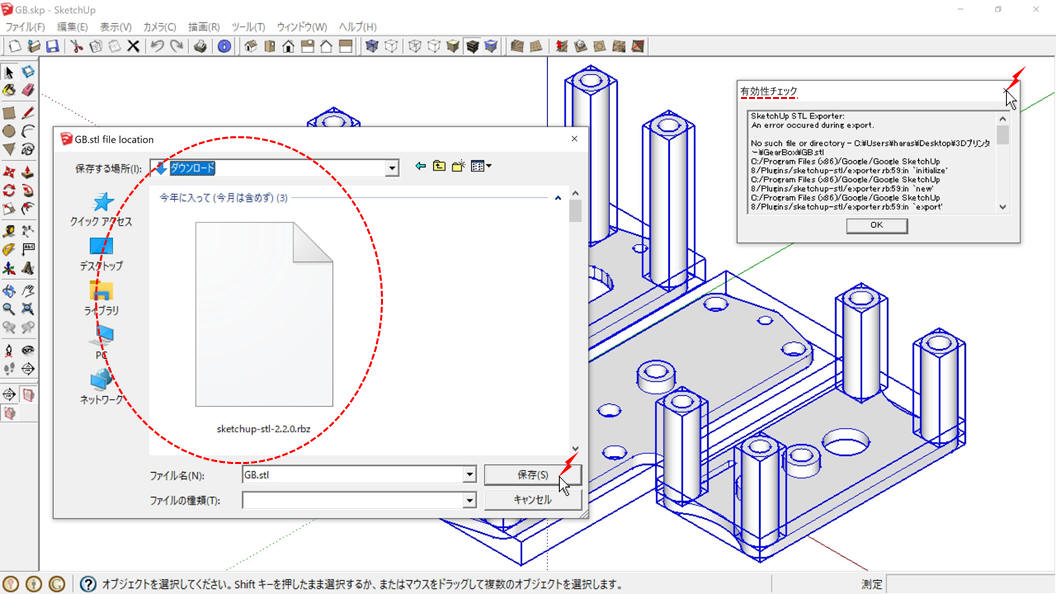
他の場所を指定すると「有効性チェック(エラー)」が表示されます。[×(閉じる)]
「CURA」では、設定をそのままで[スライス]します。
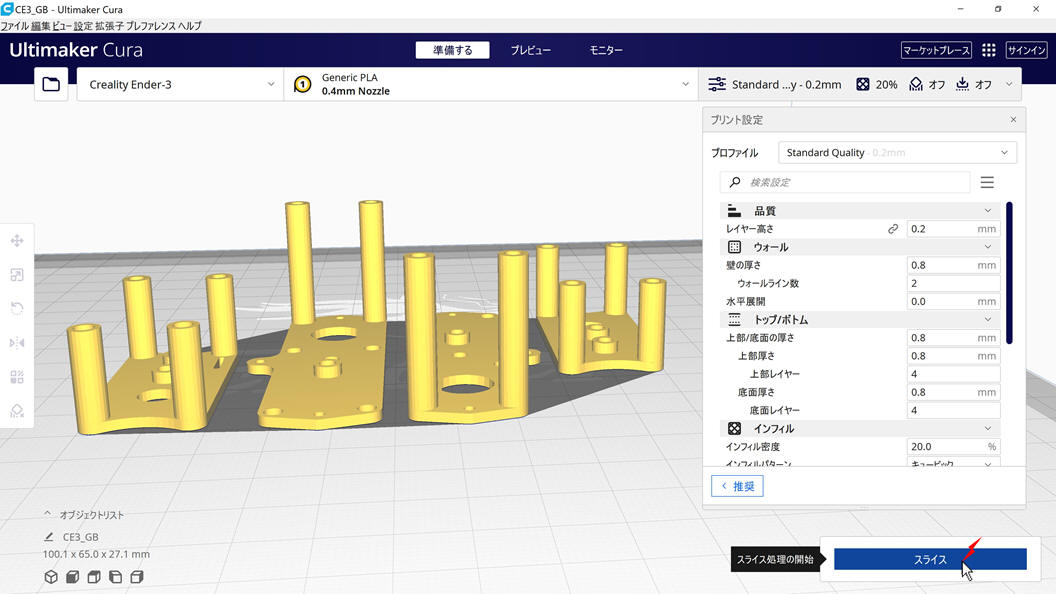
作成した「.stl,.gcode」ファイルは用済み後削除して、図面管理は「.skp」ファイルを置いたフォルダで行っています。
市販の駆動模型ギアボックスを使う
入手が容易で、軸やモーターもセットでそろい便利です。
出力軸が端なので、中央に改造(軸穴貫通)しました。ギヤー比 58:1
穴あけ(ピンバイス使用)治具[GBTdrill.skp]を3Dプリンターで印刷
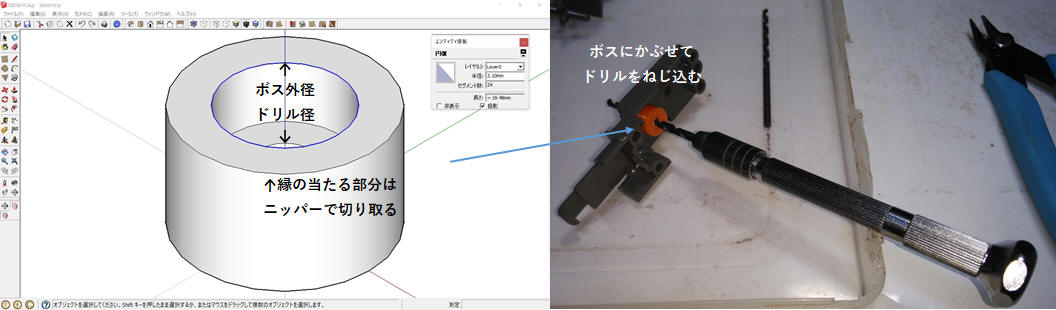
穴径は小さく印刷されます。半径+-0.05で調整しました。
いきなり3mmのドリルで突いたので、わずかながら偏心してしまったが、「良(OK=^x^;=)」とする
「C穴」にネジ(M3×20 付属のものは太くて使わない)を通しハトメ,スプリングワッシャー,ナット,スペーサーで固定(G2フリー軸)

六角シャフトを貫通穴に通し、出力側G3(六角ボス固定),入力側G1(フリー)の軸とする
取付位置検討用ゲージ作成
取付用穴と軸の位置関係を実測して、部分的に印刷しながら確認を進めました。
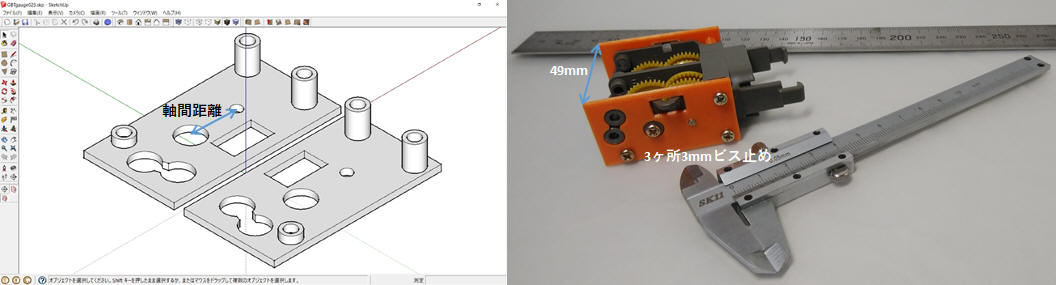
「軸間距離」を0.25mm広げた設計になっていると判断しました。ベンチマーク データはコチラ→[GBTgauge025.skp]
汎用動力ユニット組図[GBm13x2.skp]から「側板」の軸穴位置(4ヶ所)を写し取っています。
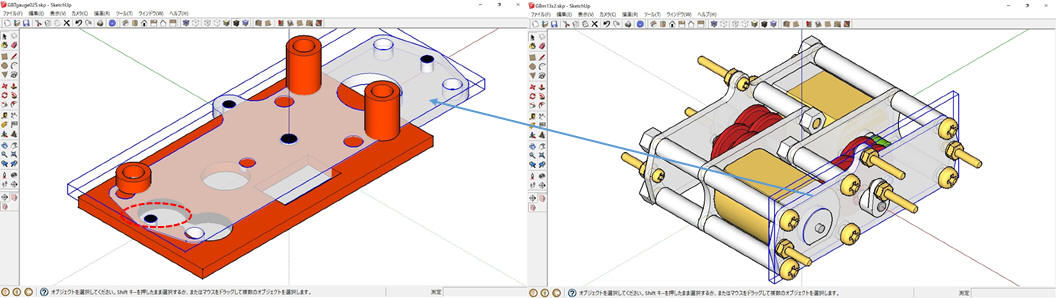
軸穴の一つがあけられないので、ホイールベース?を(他のタイプと同じに)広げましょう。
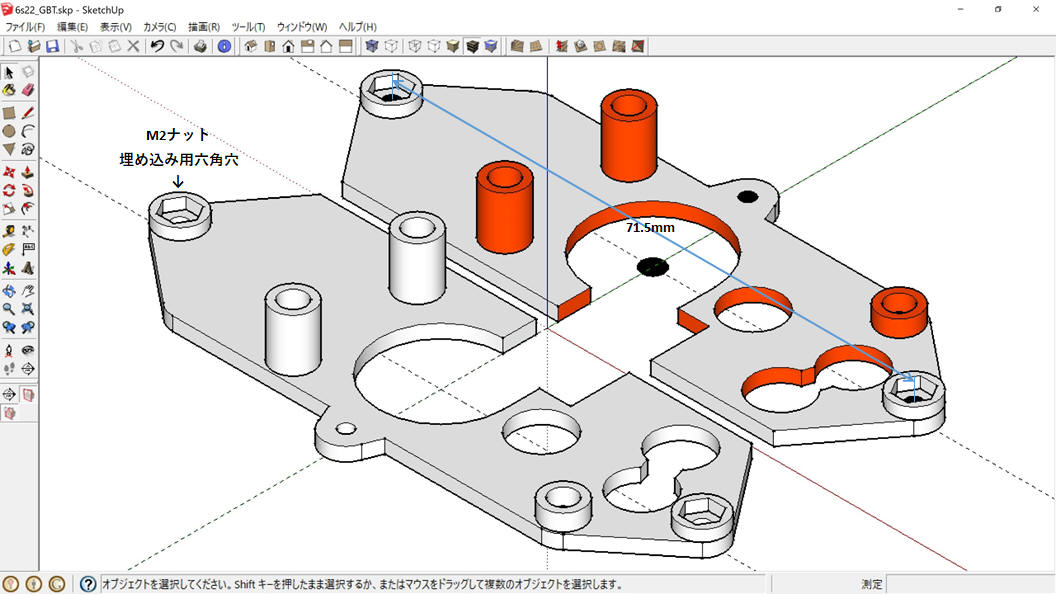
材料と印刷時間節約のため体積をできるだけ小さく、かつ作図しやすいデザインにしています。→[6s22_GBT.skp]
順次印刷して具合を見、組み立てながら設計を進めています。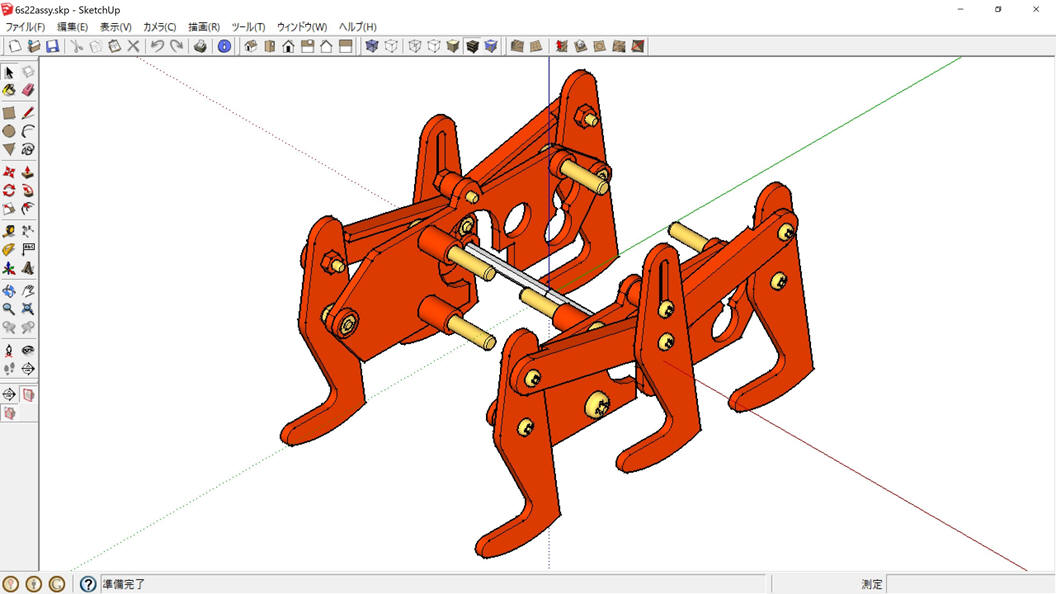
試作品が出来上がるころに、組図[6s22assy.skp]も仕上がります。
ビスを軸として使用しています。ゆるみ止めにシート材から抜いたナイロンナットを使っていましたが、PLA製は保持力が弱いようです。
固定方法を変更、下穴にねじ込んでダブルナット、強い力が加わるところは金属ナット,スプリングワッシャーで挟みこみ
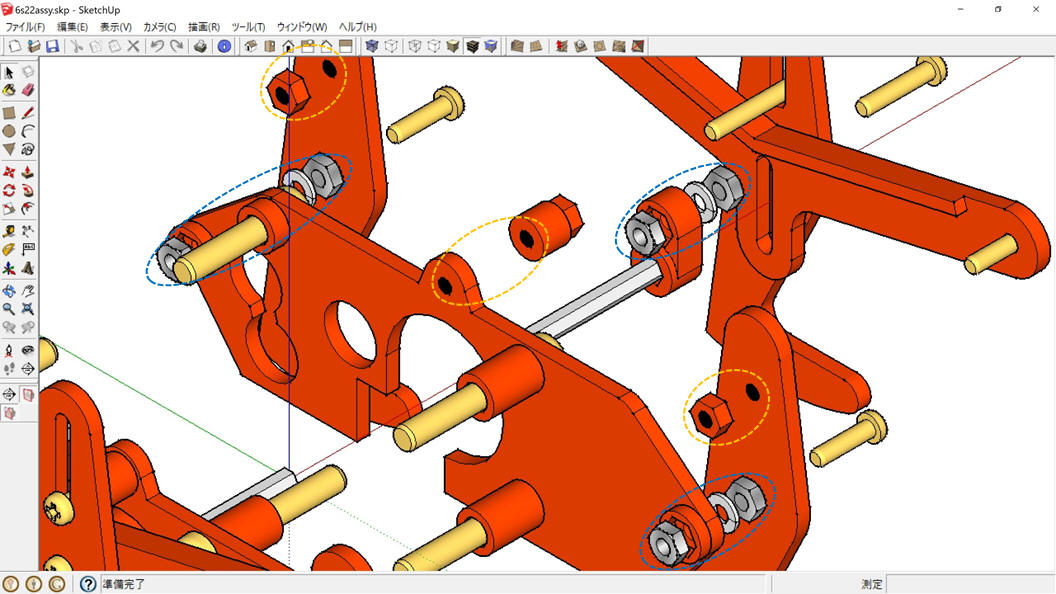
組立調整には薄いスパナが必要です。六角シャフトは金切鋸で切断、鑢仕上げ
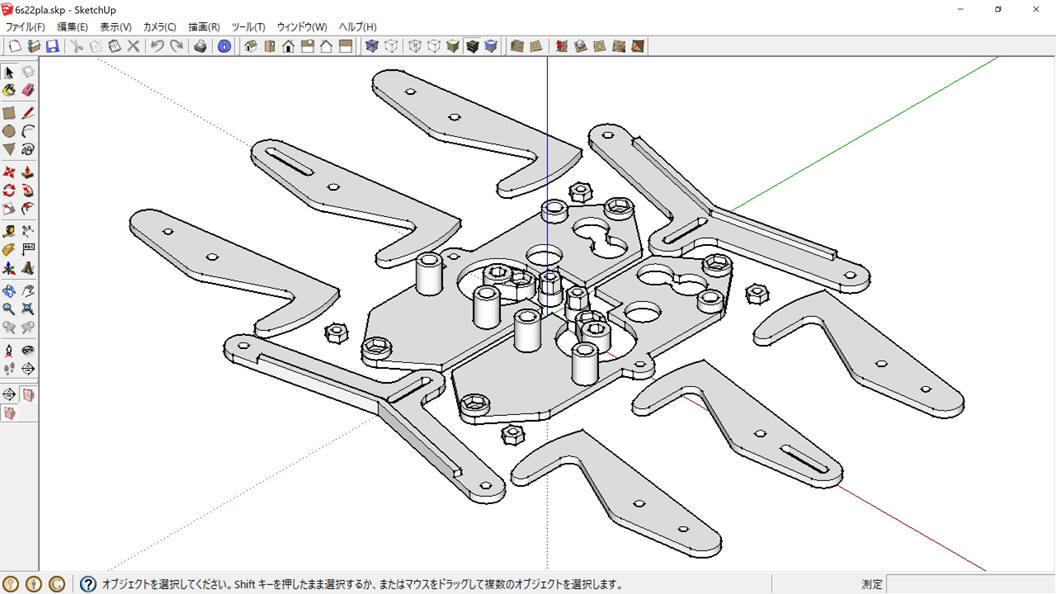
一台分のPLA部品を一つのファイルにまとめました。[6s22pla.skp]
「CURA」でスライスすると、印刷時間と材料の使用量が表示されます。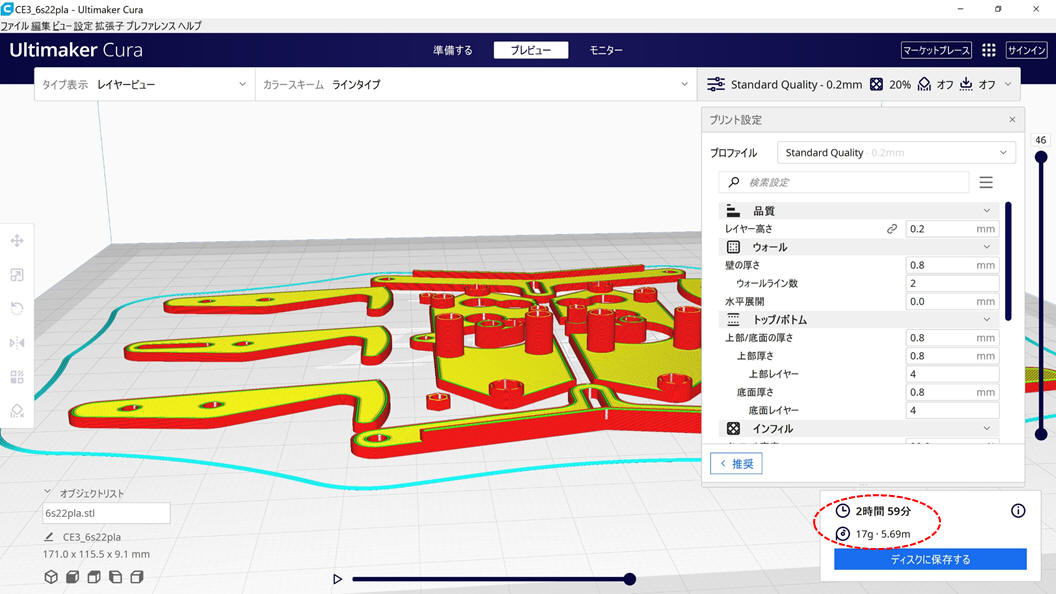
「PLAロボット」の操縦器
もちろん、PLAで印刷しましょう。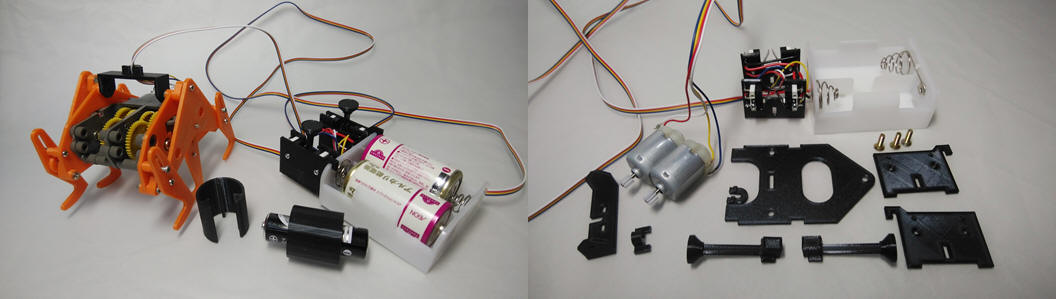
対のマイクロスイッチの一方を押して正転/逆転、PLAレバーの弾性でモーメンタリ動作を行う
コードとモーターを一体で着脱するようにしました。
配線図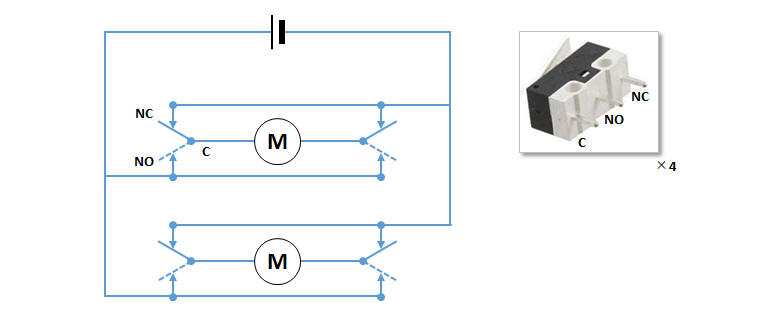
組図[SBassy.skp]、印刷ファイル[SB.skp]
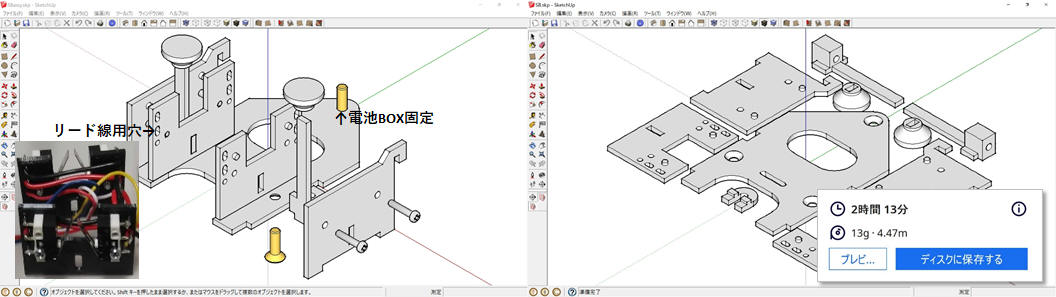
内側のプレートに穴をあけ、配線治具として使っています。仮組しながらハンダ付けを行う
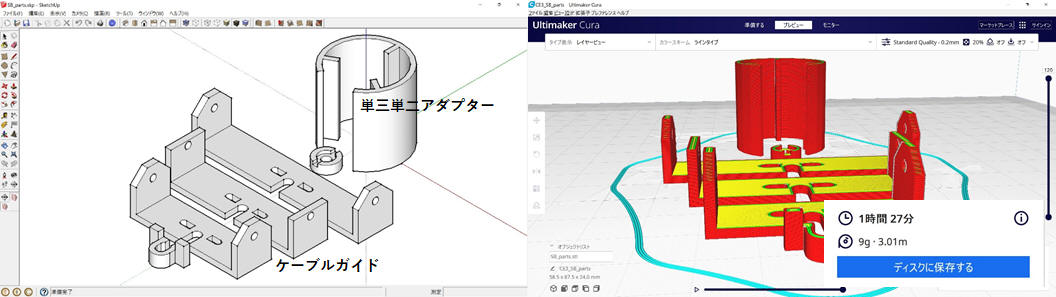
残りのパーツ[SB_parts.skp]も印刷しましょう。
PLAの接着
「塩化メチレン(模型製作用市販品)」で溶着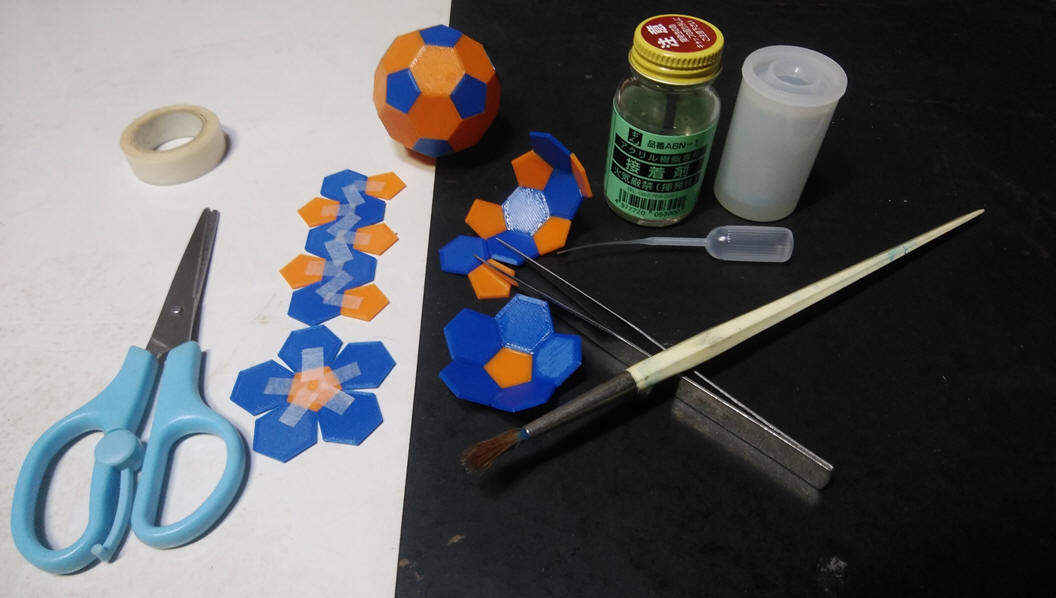
サッカーボールをPLAで印刷(一体で印刷する製作記事はコチラ→三十二面体)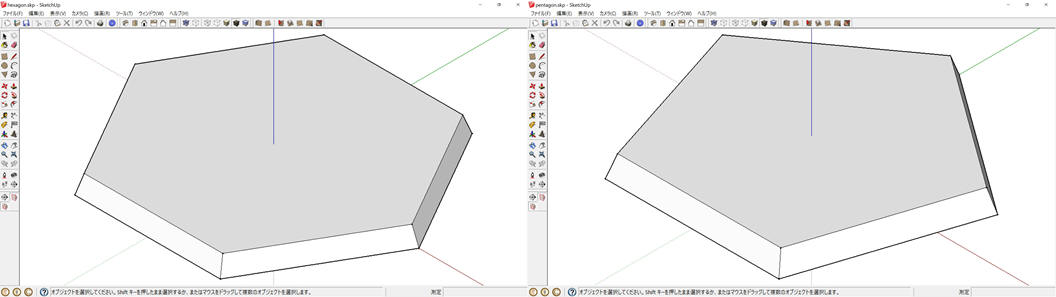
32面体のうちの六角形(20面)[hexagon.skp]、五角形(12面)[pentagon.skp]
「CURA」で数を調整
モデルの上で右クリック→[選択内容を増倍]→「選択した…コピーの数[必要数入力]」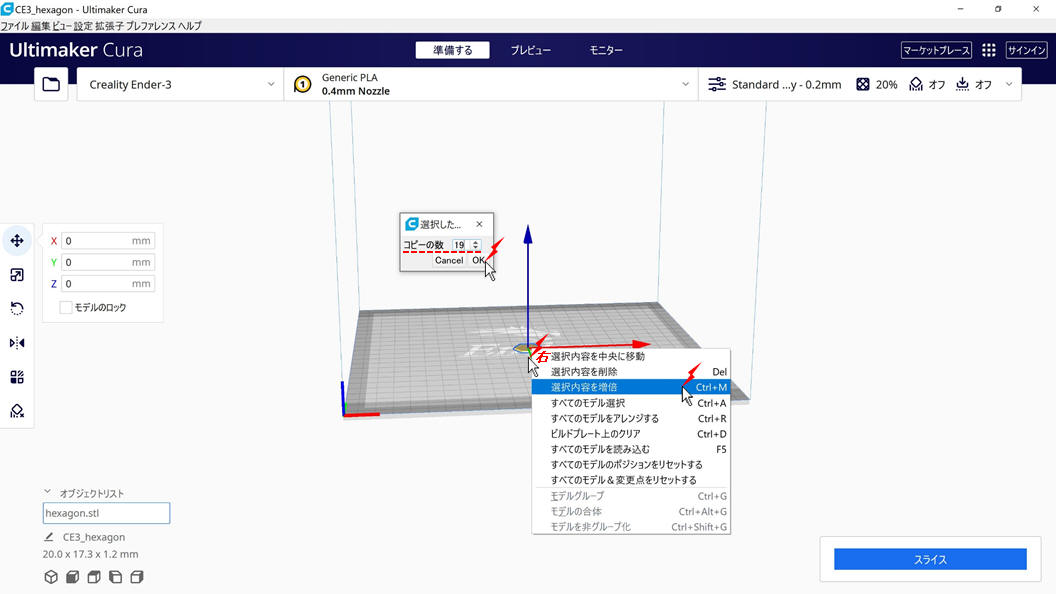
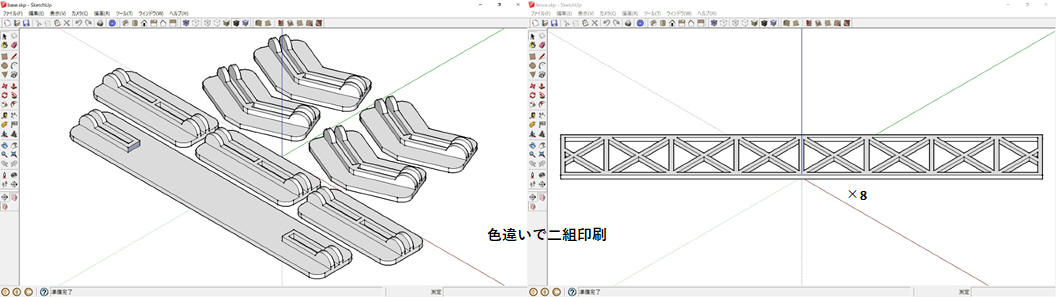
グランドも、PLAで印刷したゴール[base.skp]とフェンス[fence.skp]の組み立て式
「PLAロボット」の動画
| アクリルロボットならぬ?PLAロボット! | 「PLAロボット」の工作 |
[戻る↑]
合志市栄のマイファブラボ SAKAEPC ものづくりサポートCAD講座 [目次へ] [←前へ][次へ→]