合志市栄のマイファブラボ SAKAEPC
ものづくりサポートCAD講座
SketchUp 8 でアニメーション作成
標準化(つづき)・・・動きのパターンをそろえる
[進む↓]
 |
 |
| [UFOdn.skp] | [UFOup.skp] |
等加速から等速
速度(移動量:15コマ/秒)を「Susan姉さん」の身長(162cm?)を目安に割り出しました。乗り心地は考慮していません。
エクセル使用
 |
 |
| [MacaronStart.skp] | [MacaronStop.skp] |
 |
 |
| [MirabellStart.skp] | [MirabellStop.skp] |
「サンプルファイル.skp」では「アニメーション 設定[シーンの切り替え(0.06秒),[シーンの遅延(0秒)]」としています。
GIFアニメはアプリから「各フレームの表示時間(80ミリ秒)」に設定、MP4は
Windows 10 に付属の「フォト」を使って「期間(0.06秒)」に設定
MP4動画「SketchUp8でアニメーション作成
標準化教材 動きのパターンをそろえる UFO」をYouTubeにアップしています。
「表(Excel)」を用いた「乗り物の動き」
「MacaronM17Assy.skp」を開いてください。ここでは「発車シーンの編集手順」を解説しています。
方向転換、高さ位置を調整
[レイヤを追加]→全選択→「レイヤ間移動」
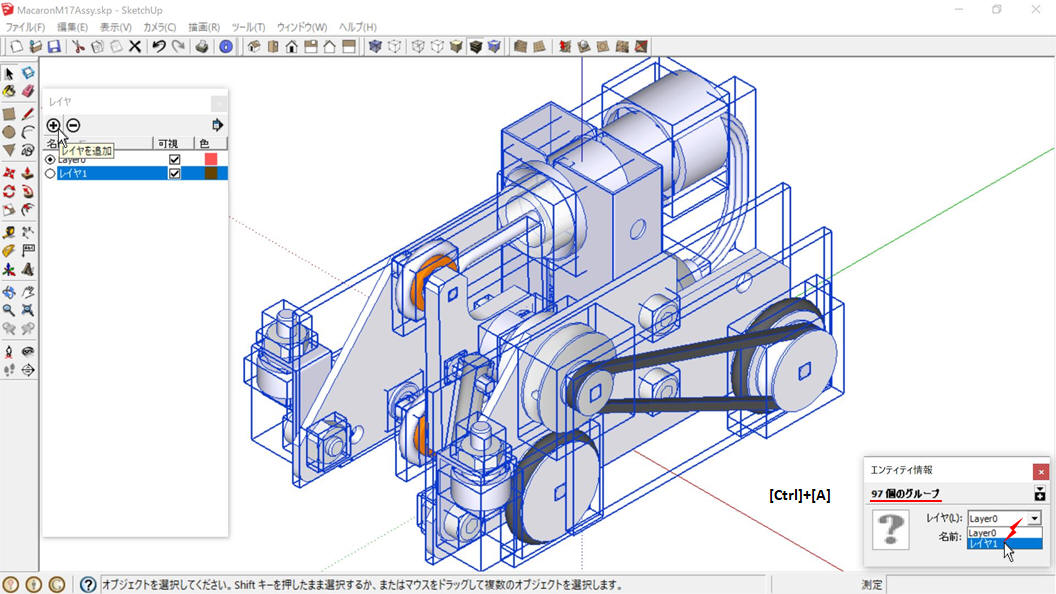
「Layer0」が空となり、「レイヤ1」が全選択状態です。
「移動/コピー」、ここでは「緑の軸上(表より1mm前進)」→[レイヤを追加]、選択状態を保ったまま、追加したレイヤに「レイヤ間移動」
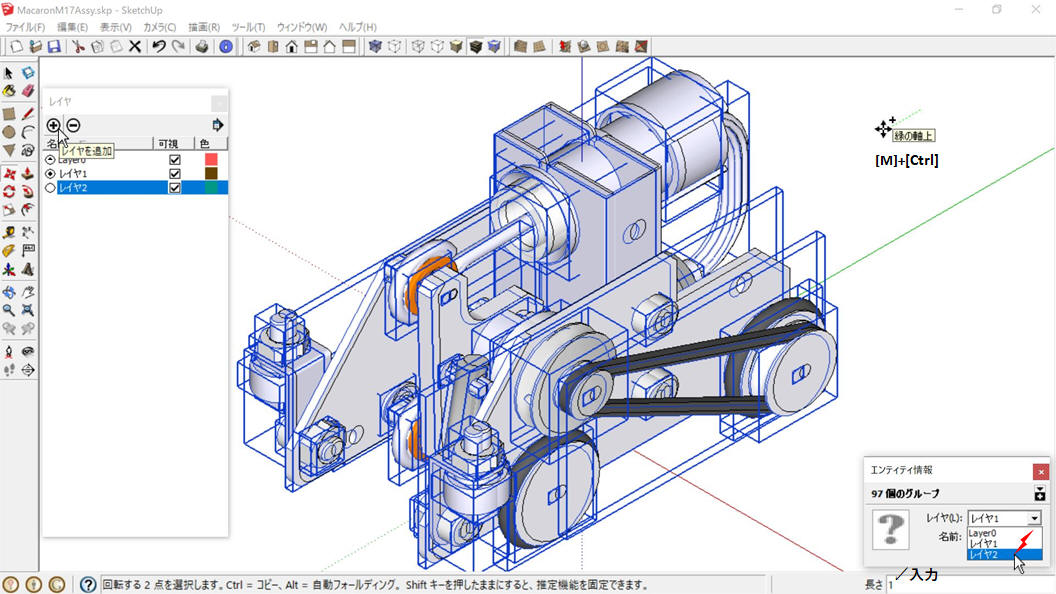
「移動」と「レイヤ間コピー」を合わせて行っています。
表に合わせて、同様の操作を繰り返す
「レイヤ ウィンドウ」でレイヤの可視/不可視を、順次切り替えて作業しています。
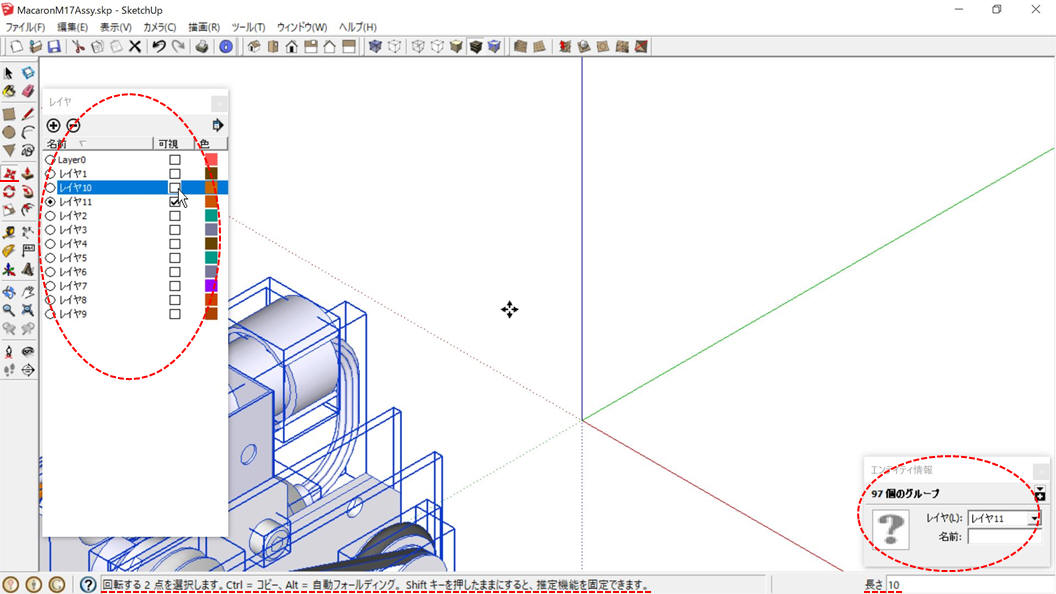
「レイヤ24」まで作業を終え、リネーム(レイヤ名を2度クリック)
「カメラ[遠近法]」、「レイヤ11,18」可視、[全体表示]
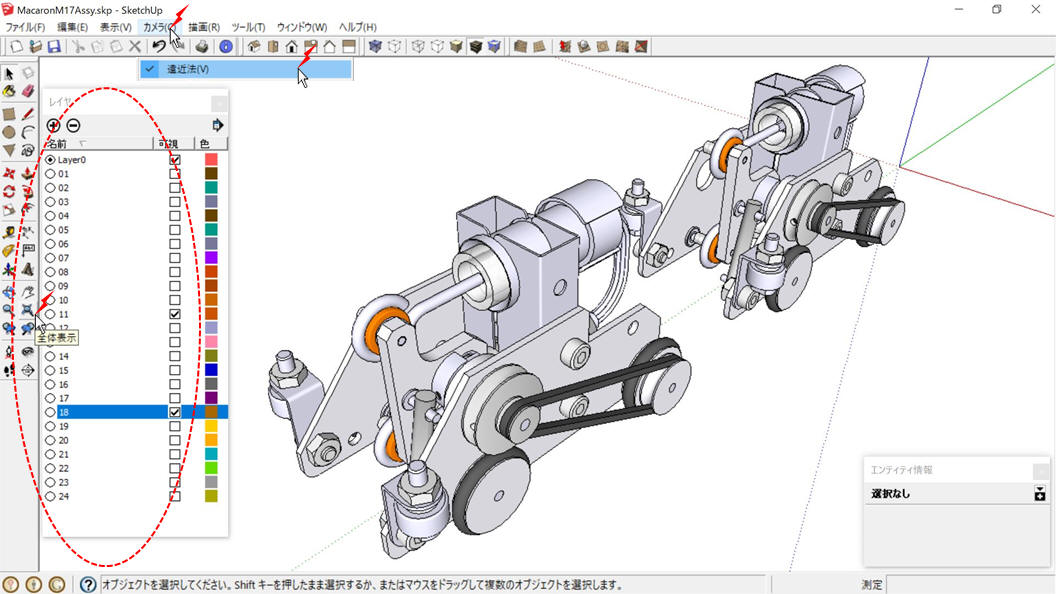
「カメラ
ビュー」を固定したまま(書き込みレイヤ[Layer0])、「可視レイヤ(01〜24)」を順次切り替え、「シーン(1〜24)を追加」
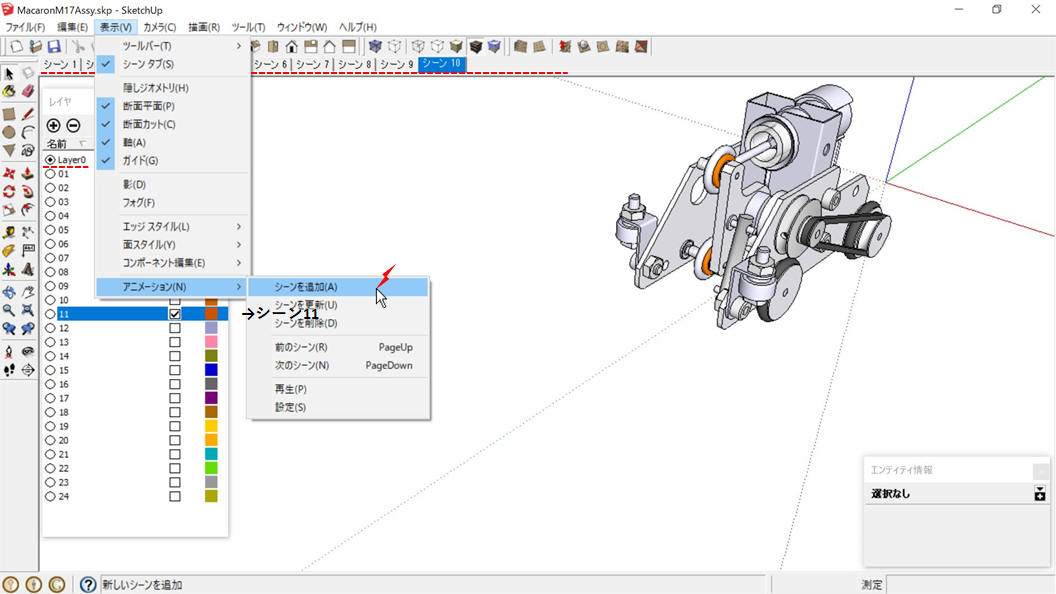
「アニメーション[設定]、[再生]」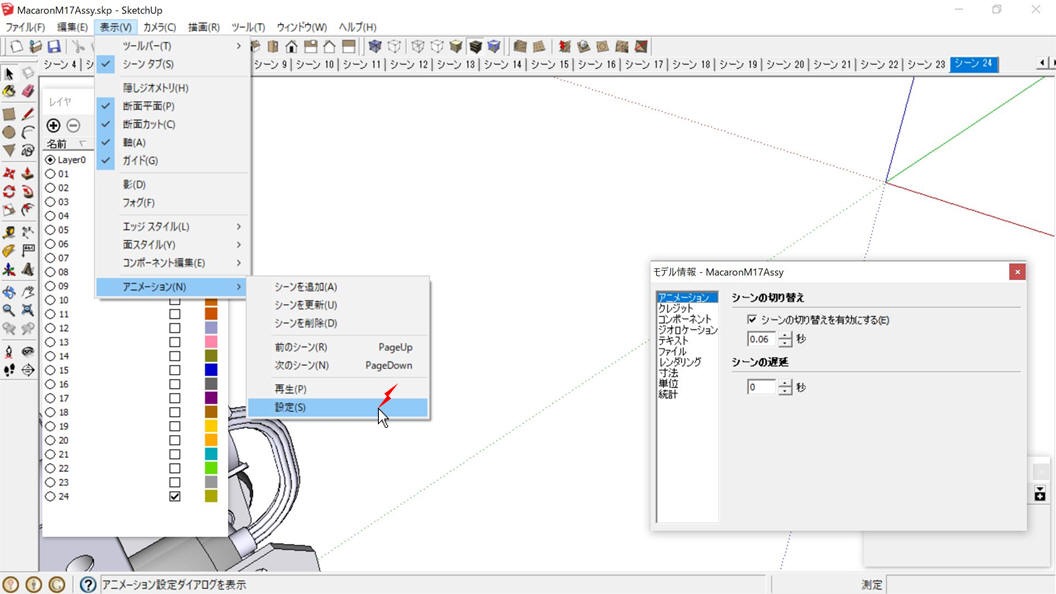
動きを確認したら、ここで一旦保存してください。
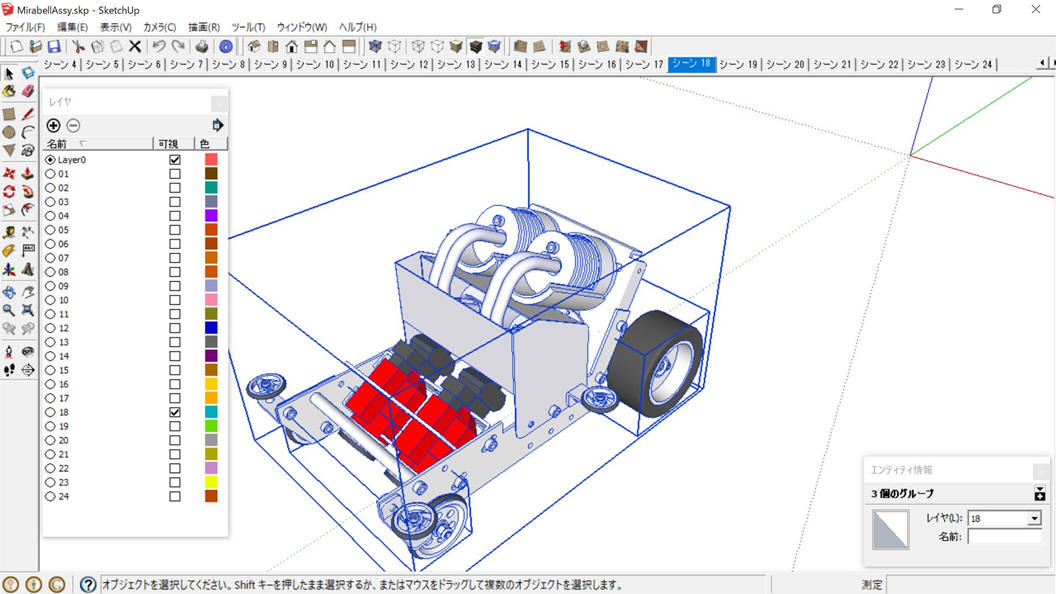
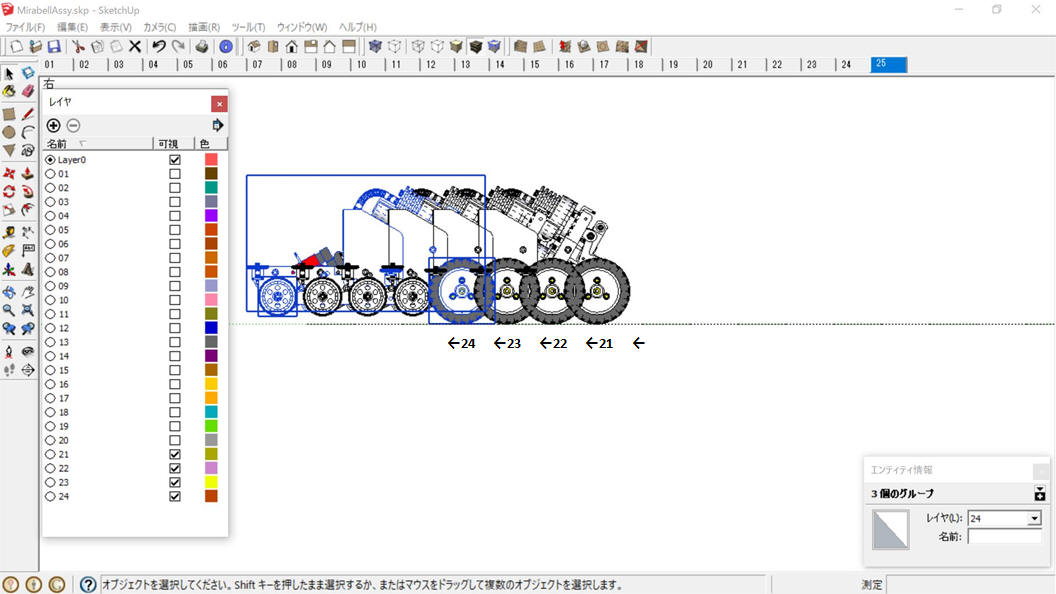
続けて「MirabellAssy.skp」を開き、同様の「発車シーン」を作成
「軽く」するために外から見えない部品を消去しました。全長が「Macaron」と同じになるよう「縮小」して「表」をそのまま使っています。
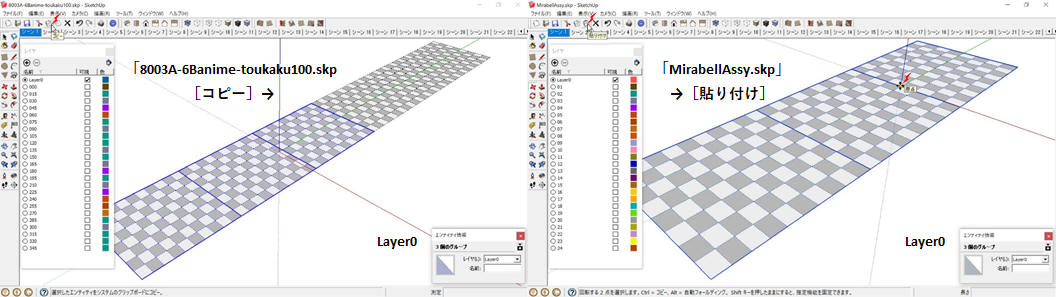
[8003A-6Banime-toukaku100.skp]の「Layer0」から「道」を[コピー/貼り付け]
「シーン24」で「Layer0」のみ表示にして[シーンを追加]→「シーン25」追加
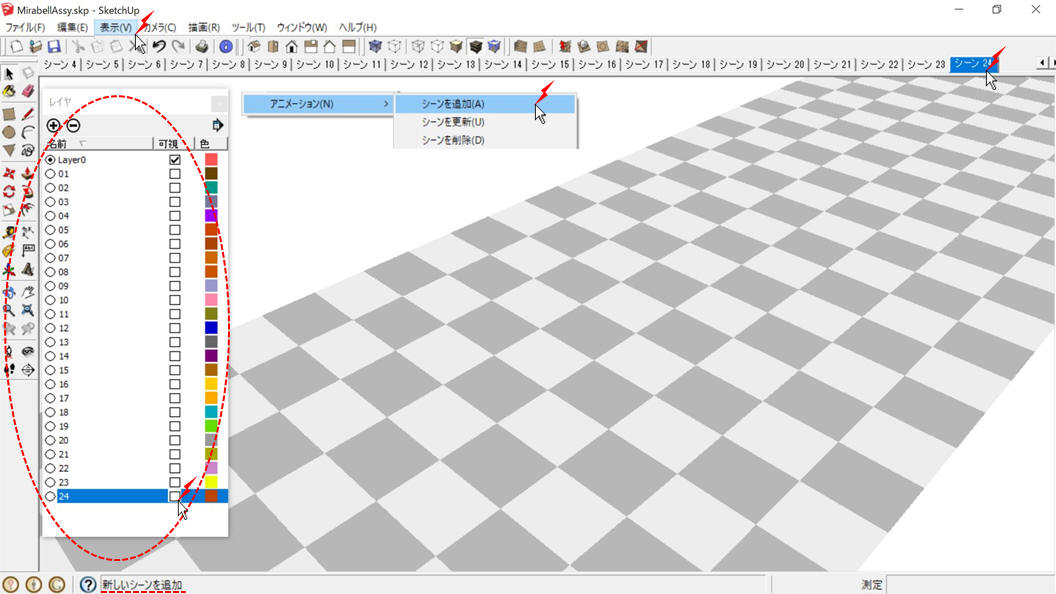
「シーンマネージャー」から、「シーン名」をリネームしています。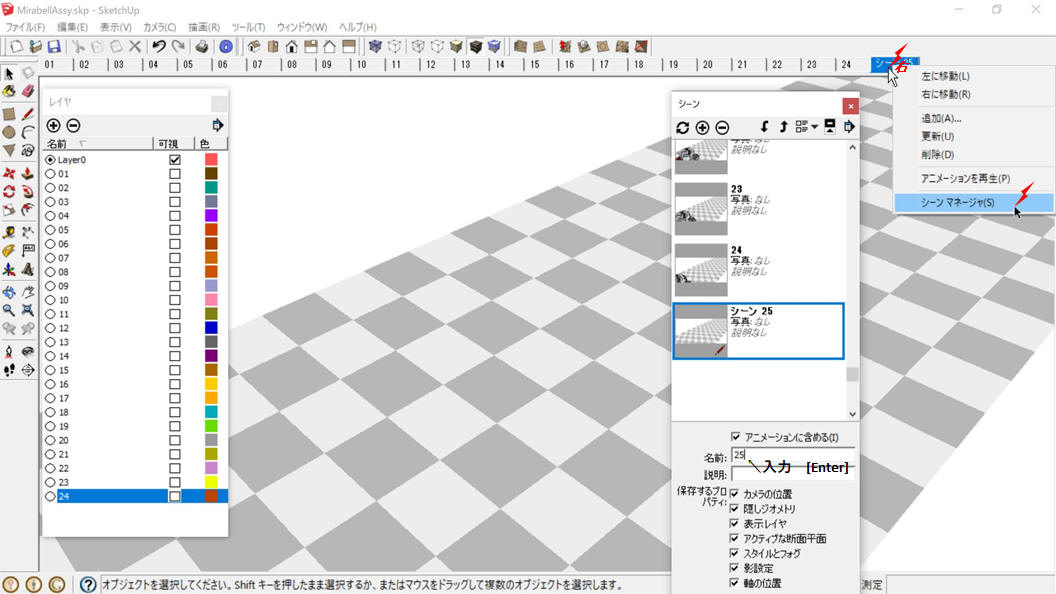
「アニメーション[設定]、[再生]」 、動きを確認
前輪が浮いてる!!、車輪が回ってない、シーン25で後輪が見切れてない・・・全てOK(=^x^;=)
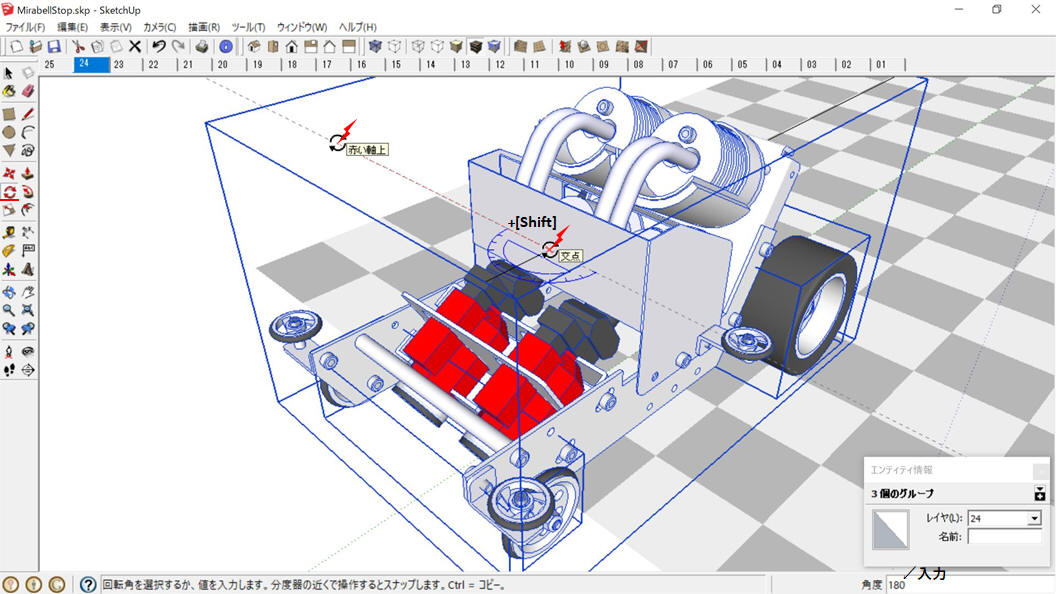
「MirabellStart.skp」と名前を付けて保存し、引き続き「MirabellStop.skp」と別名で保存し「停車シーン」の編集を始めます。
「シーンマネージャー」から、再生順を逆転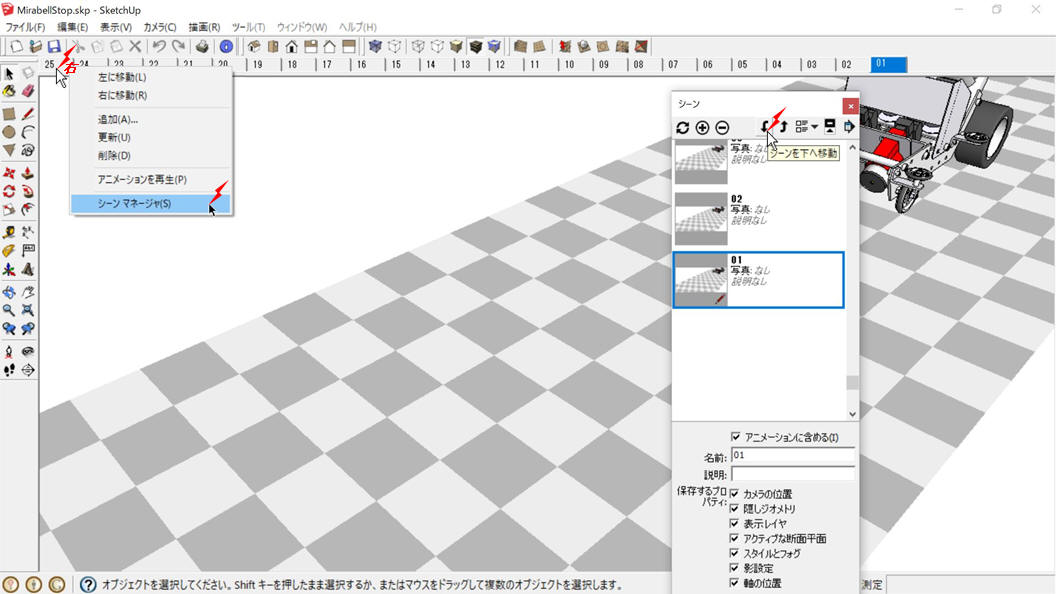
「道」の中心線を引いて(Layer0)、真上(青い軸上)に[移動(20mm)]
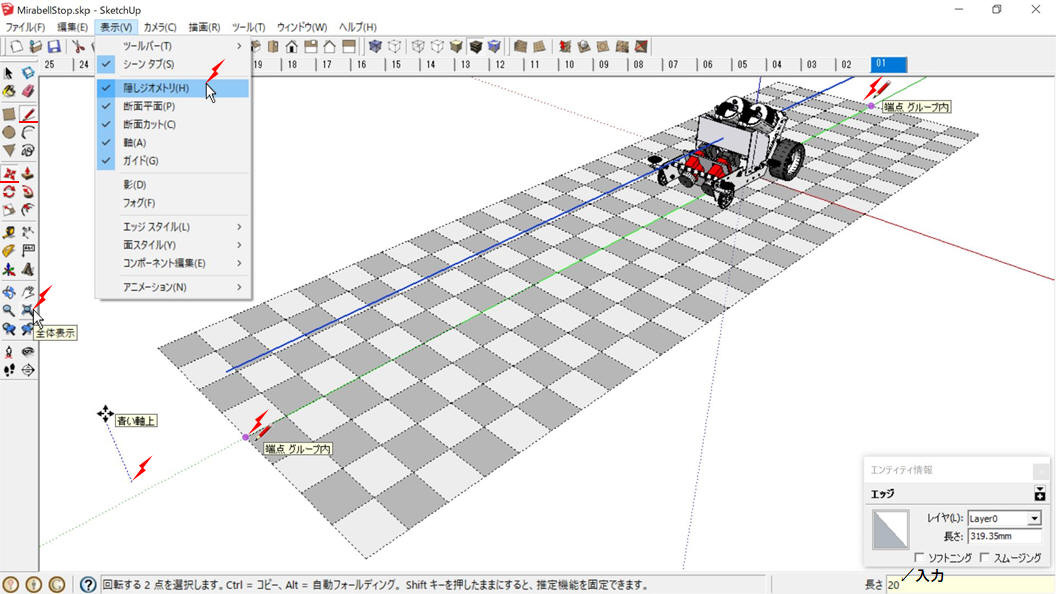
各シーン(24〜01)で車(3個のグループ)の進行方向を反転(中心線と部品の「交点」で[回転(180)])
「Macaron」でも同様の作業を行い、「発車/停車パターン」として「GIFアニメ」と「ファイル.skp」をアップしています。
人体への表(動きのパターン)の適用
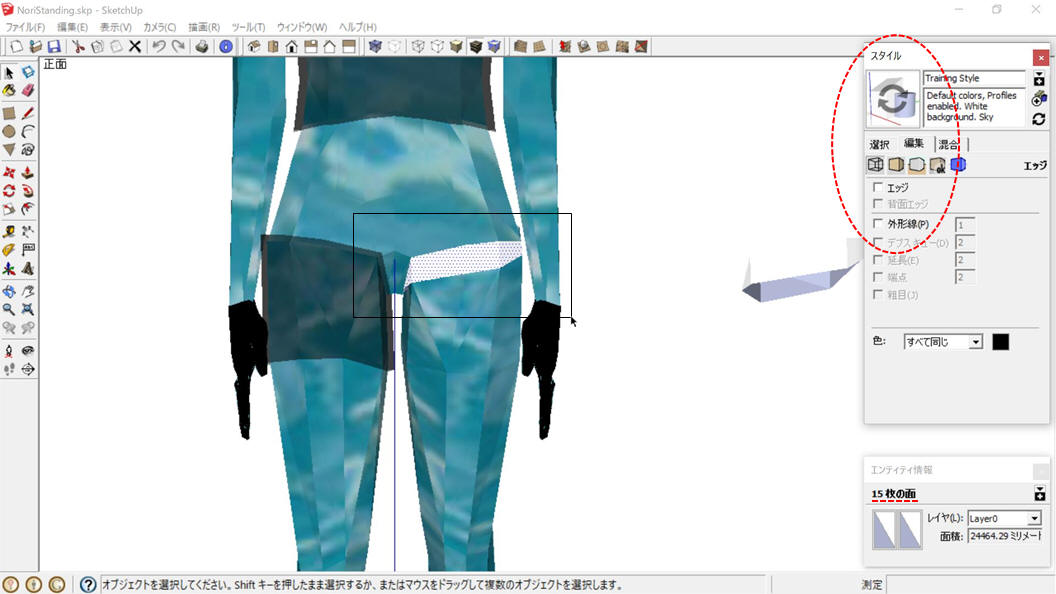
「NoriStanding.skp」を開いてください。
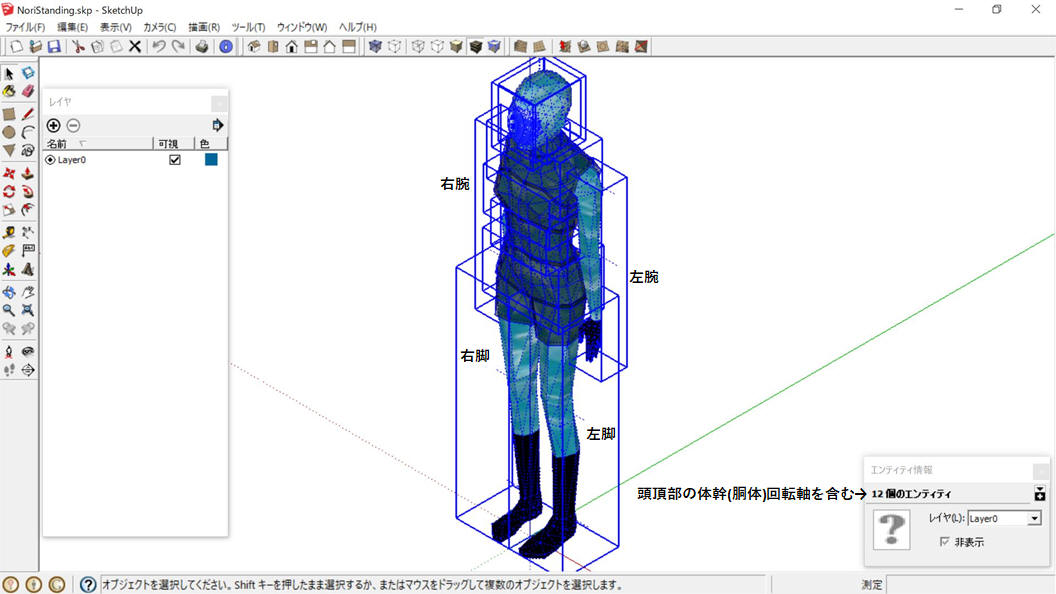
「腕、脚」は正面(「青軸」中心)から見て左右対称です。「回転軸」を「隠しジオメトリ」で各グループに描いています。
「人体」を動かすの「歩く」で使用した「表」をまとめました。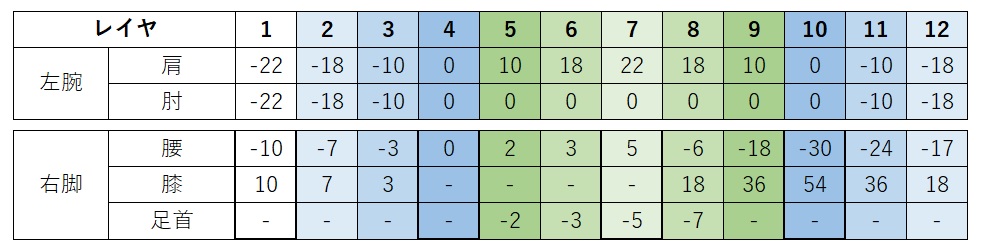
回転方向(+/-)は「右側面」を基準に表記
ここでは、「表」に沿って各レイヤ(01〜12)内でそれぞれ「グループを編集」から「回転軸」ごとに[回転]を行いました。
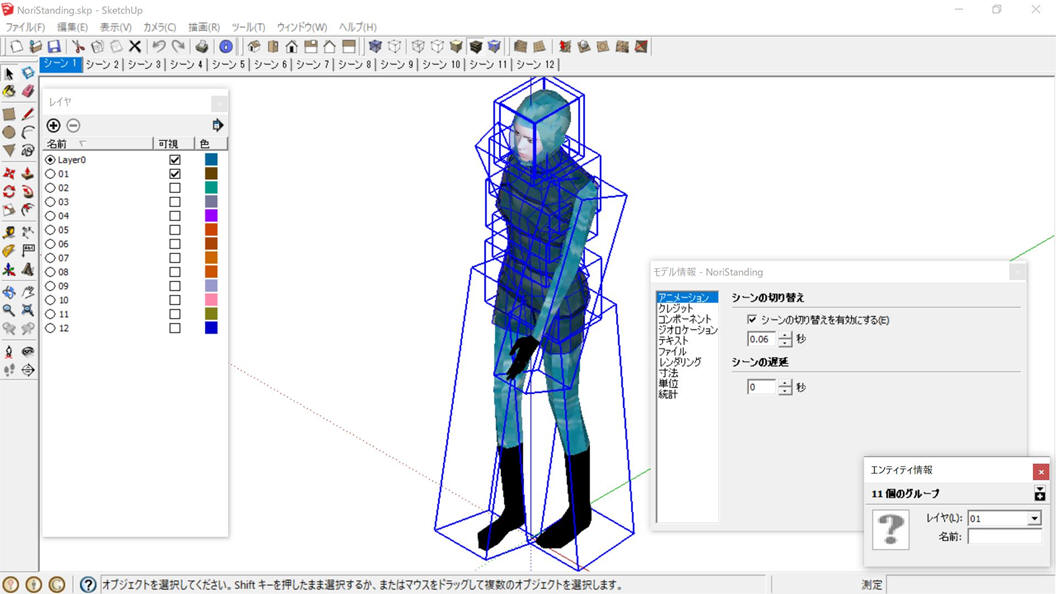
「アニメーションを設定」しています。
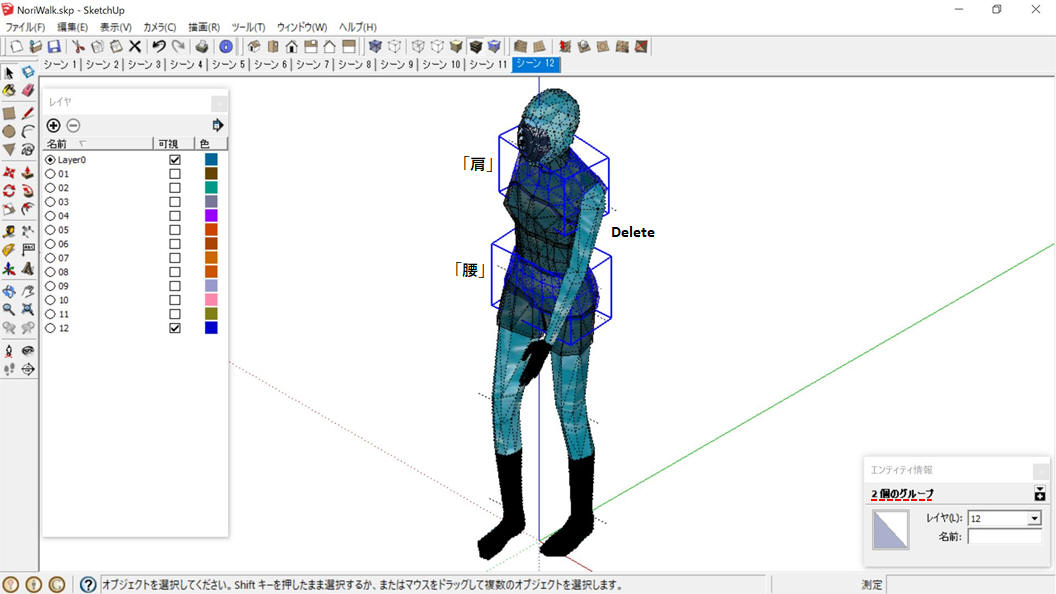
[「肩」と「腰」 を揺らす]で用いた「表」です。
回転方向(+/-)は「平面」を基準に表記
レイヤごとに、グループをまとめて[回転(体幹軸)]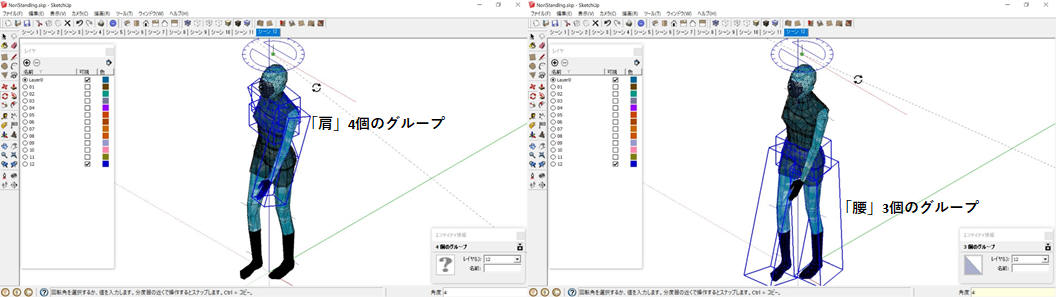
「肩(胸)」と「腰」の間の「胴(外)」を動きに合わせてねじります。
「胴」をクリック連打(5回)
「胴」グループは「内,外」グループから成ってます。図では「胴(外)」が「グループを編集(エンティティ全選択)」状態です
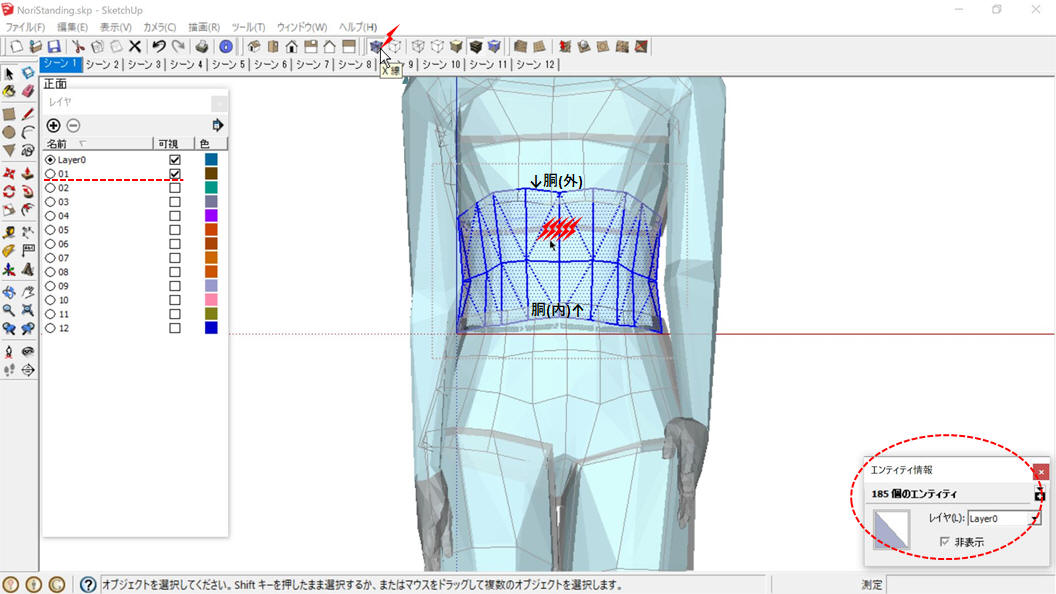
上部のエッジ(ループ状14個)を選択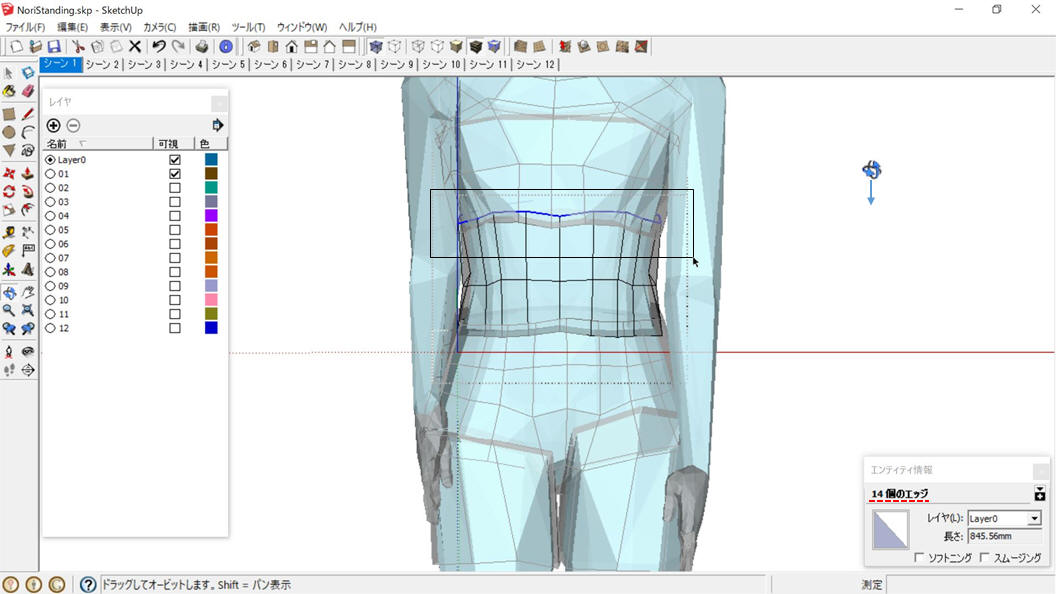
[グループを編集「胴」]操作内の[グループを編集「胴(外)」]操作になります。
分かりづらい場合は以前の解説のように、「胴」を「Layer0」に一旦「レイヤ間移動」して作業してください。
[回転(体幹軸)]、「表」より対応レイヤの「肩」の値(-6)を入力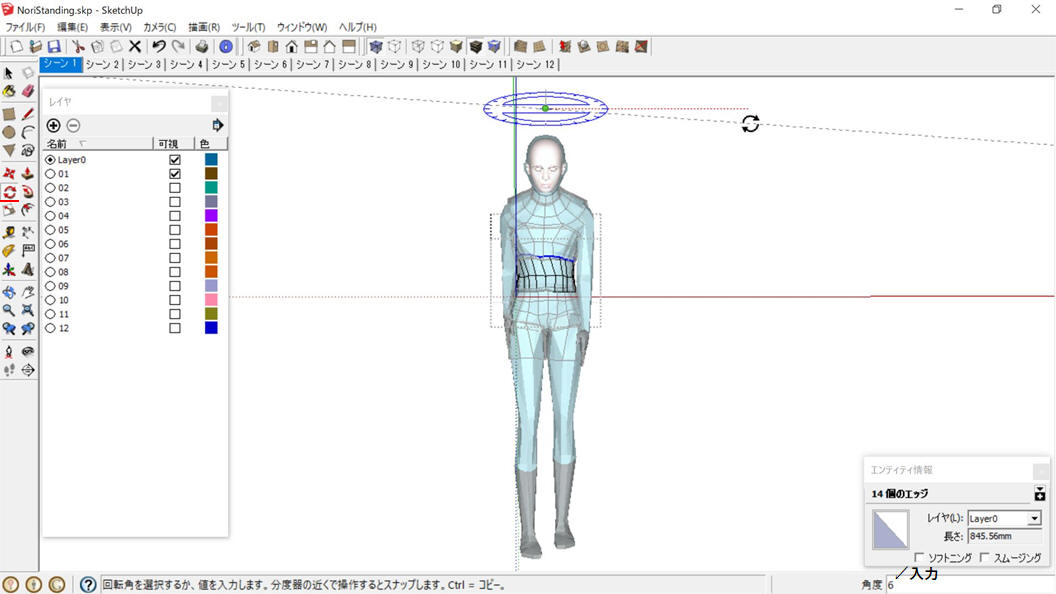
下部のエッジ(ループ状16個)を選択→[回転]、「腰」の値を入力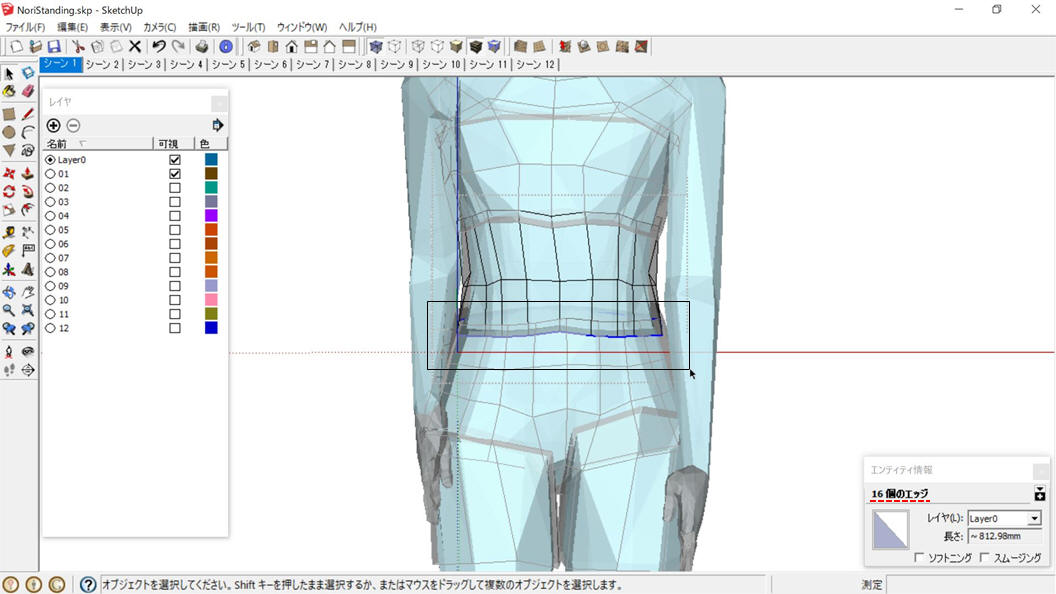
ユニフォームの縦線で、動作が確認できます。
作業中のレイヤのみ「可視」、全選択
一方の爪先(レイヤ1,8〜12:左足、レイヤ2〜7:右足)を基準点とし、垂直(「青い軸上」に[Shift]で固定)に[移動(線に拘束)]
地表面(原点)と高さを合わせる(線に拘束 点から軸方向)
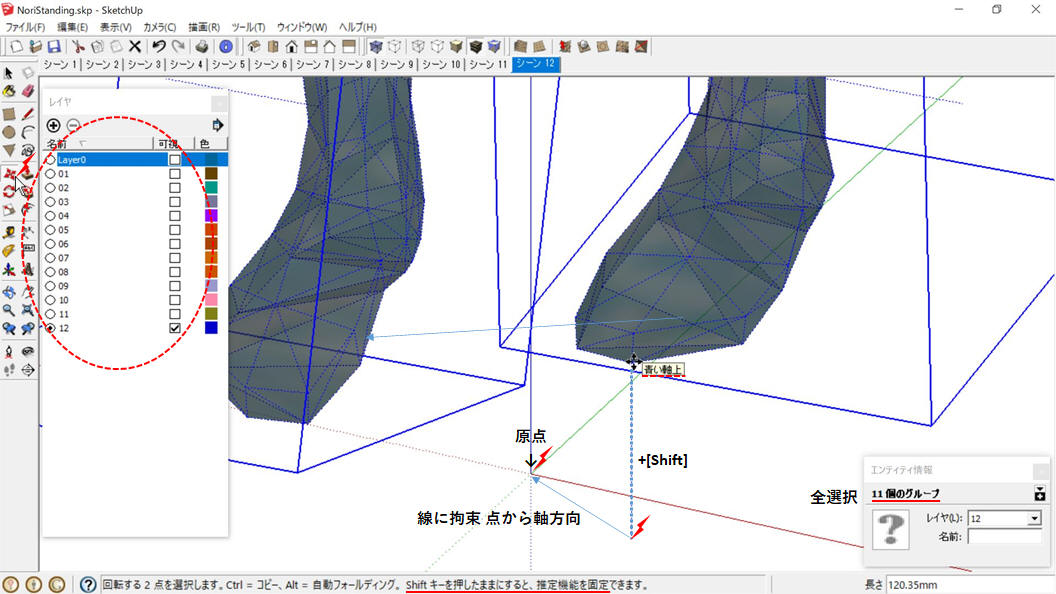
「NoriWalk.skp」と名前を付けて保存
「テンプレート(フォーム)ファイル」の改訂
「脚」をある程度上げると、お尻に穴が開いてしまいました。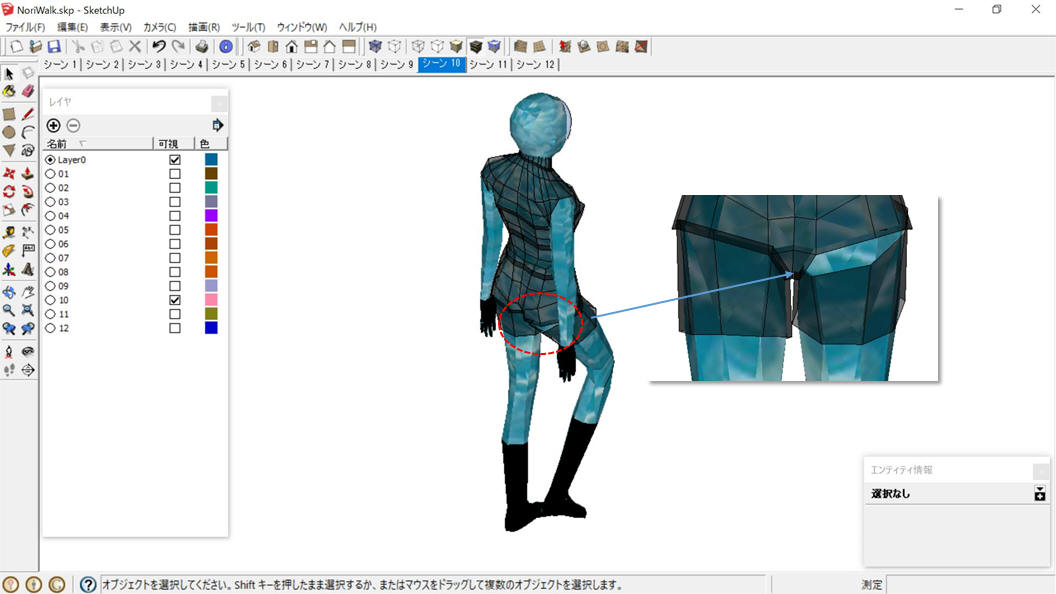
元のファイル「NoriStanding.skp」を開いてください。
「脚(左)」と「腰」を[分解]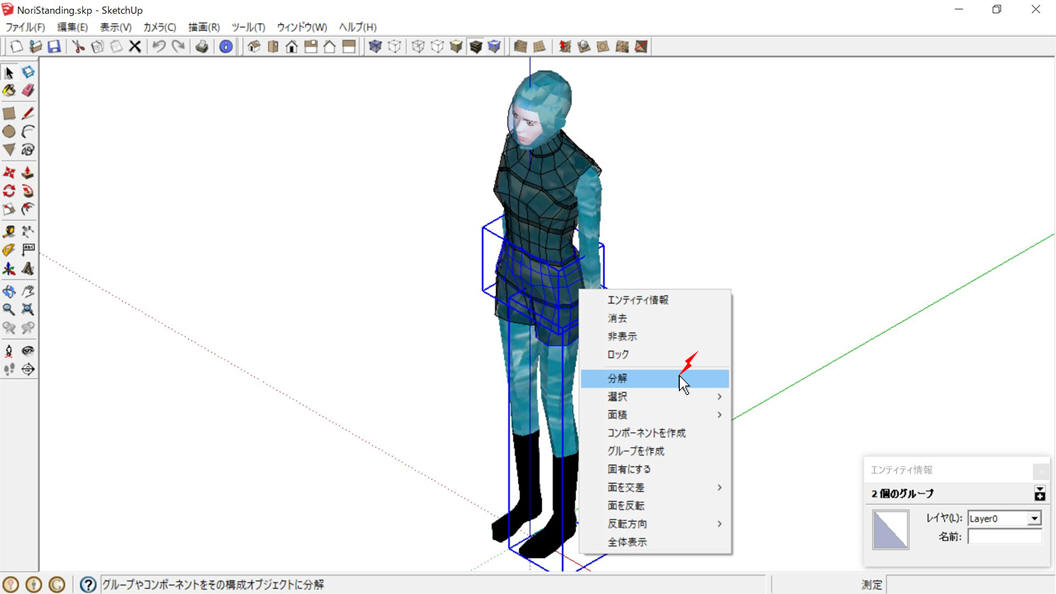
ユニフォームを一旦よける(解説に便利な手順で操作しています)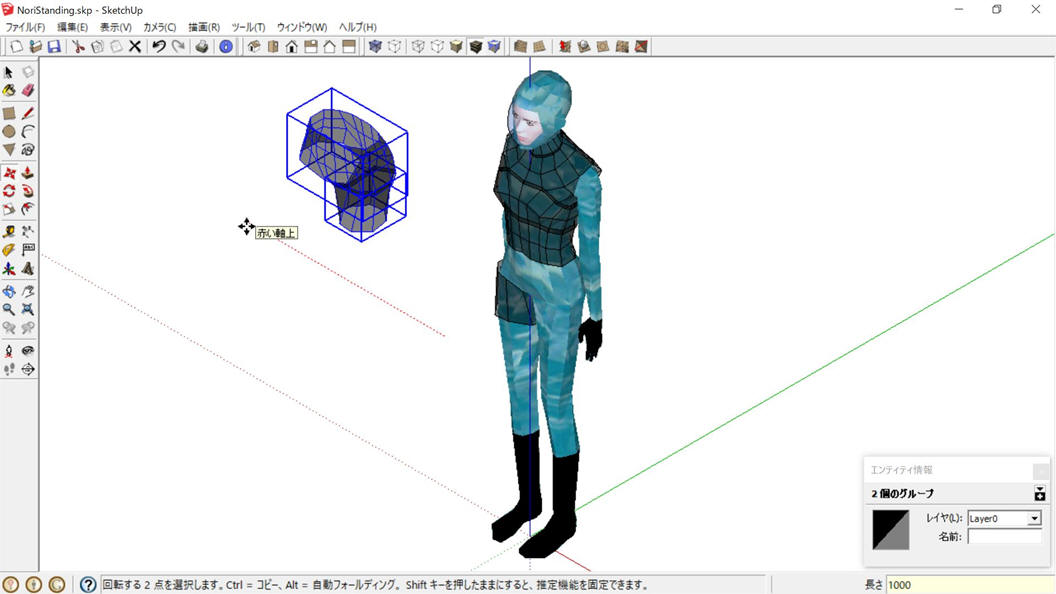
「脚」を[回転(-30)]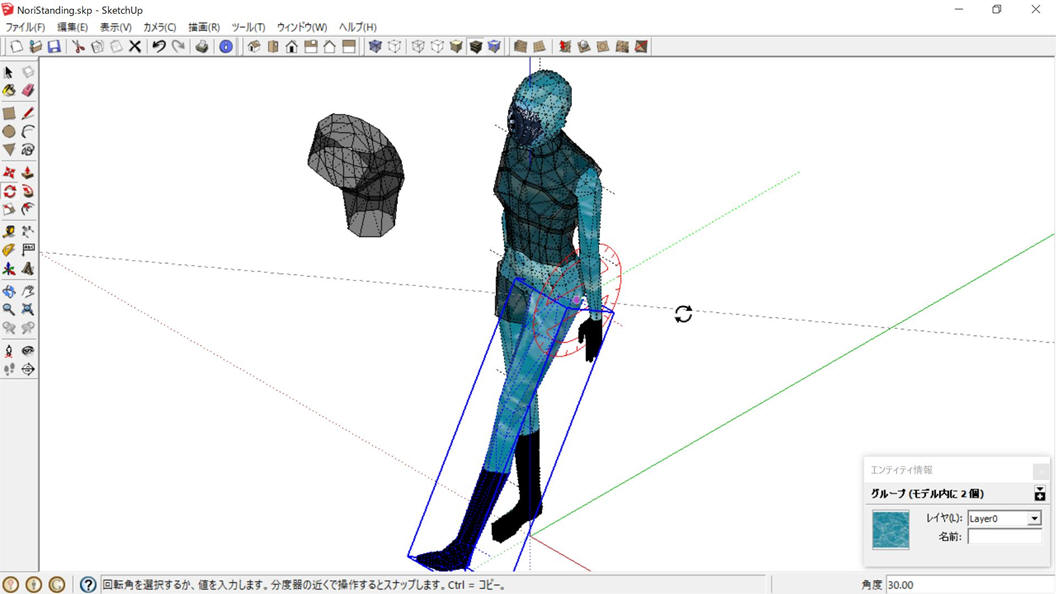
[線]で「面」を作成し、[回転]で生じる穴をふさぐ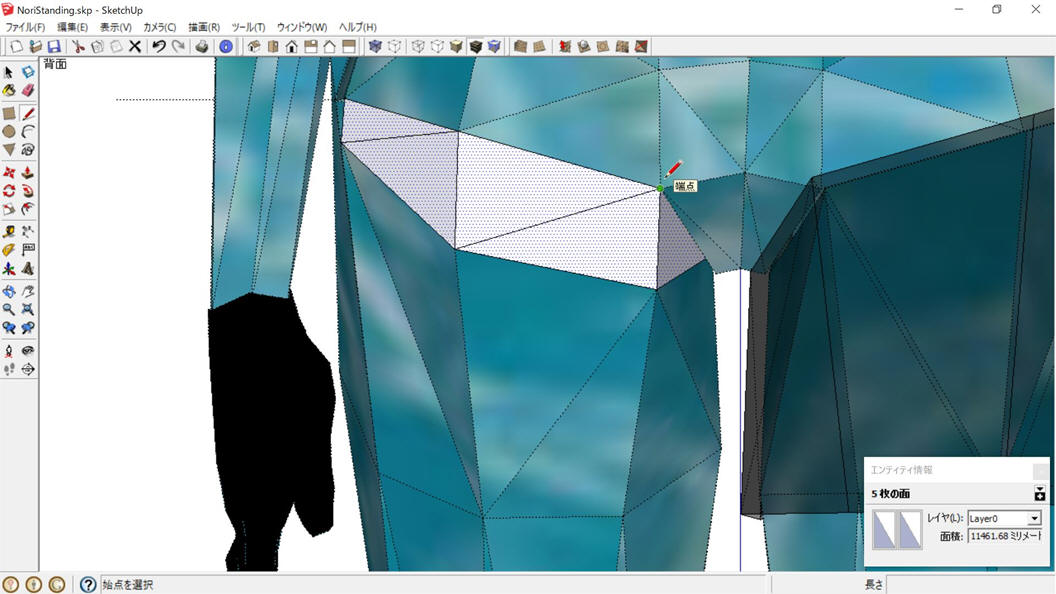
「脚」を[回転(60)]、「走る」の「表」参照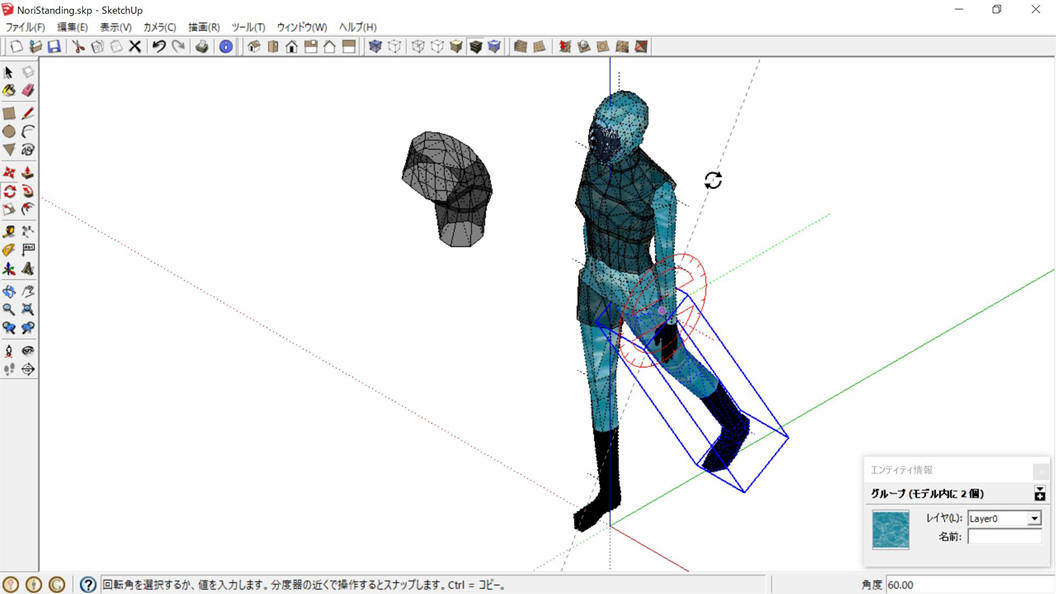
[線]で「面」を作成し、[回転]で生じる穴をふさぐ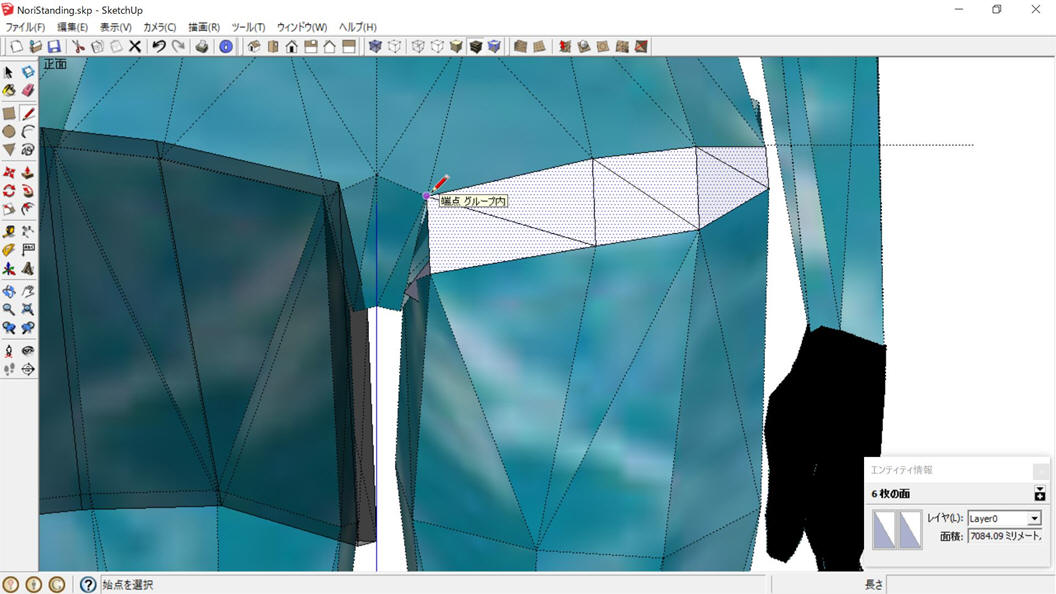
「X線」表示にし、作成した「エンティティ」を[選択]して、見やすくしています。
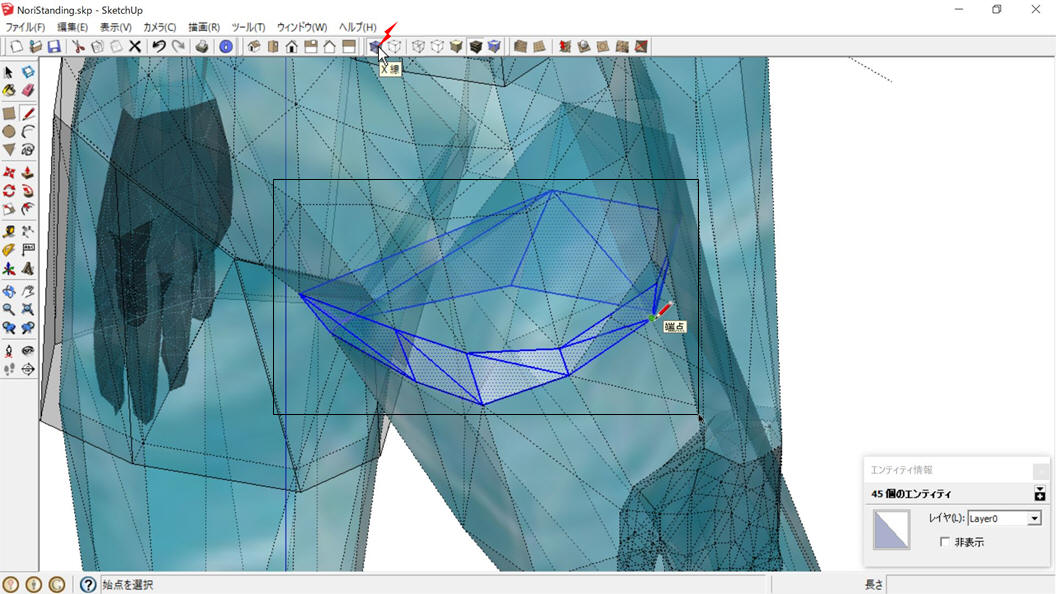
[移動/コピー]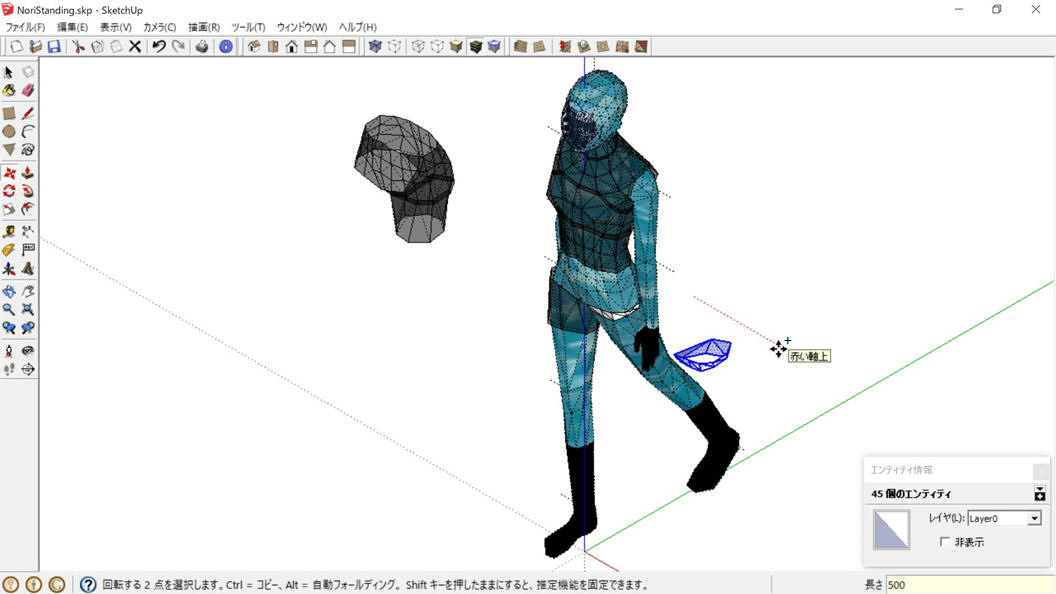
[縮尺]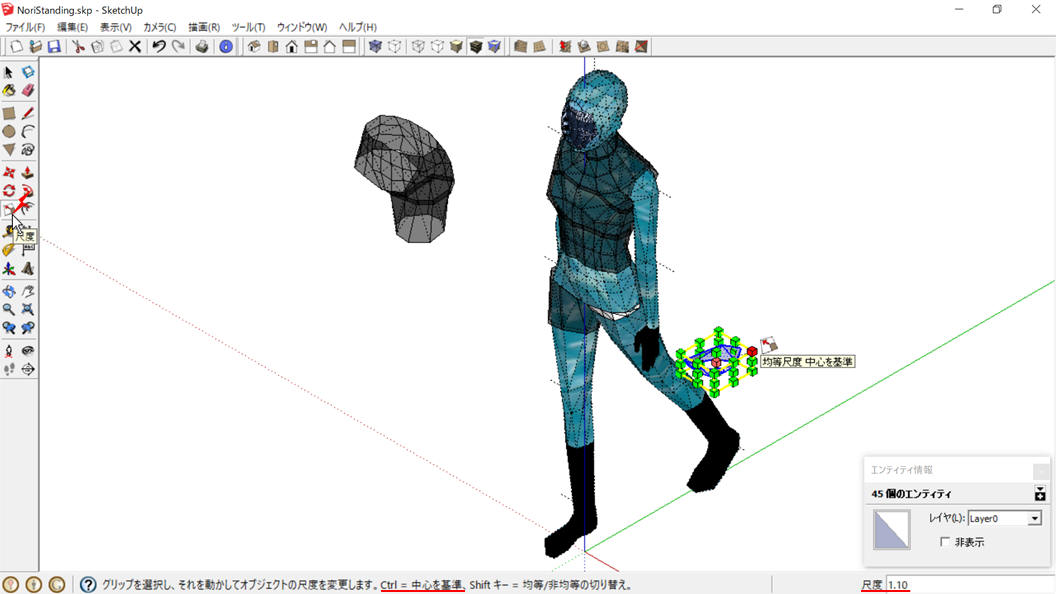
頂点のグリップを選択して[Ctrl]キーを押しながら「均等尺度 中心を基準」に尺度(1.1)で拡大
「スタイル[編集]」から[エッジ,外形線]のチェックを一旦外し、補修部分を選択→「面」のみが選択される
[エッジ,外形線]にチェックを入れ、[Shift]キーを押しながら選択し直す→「エッジ」のみ選択に変わる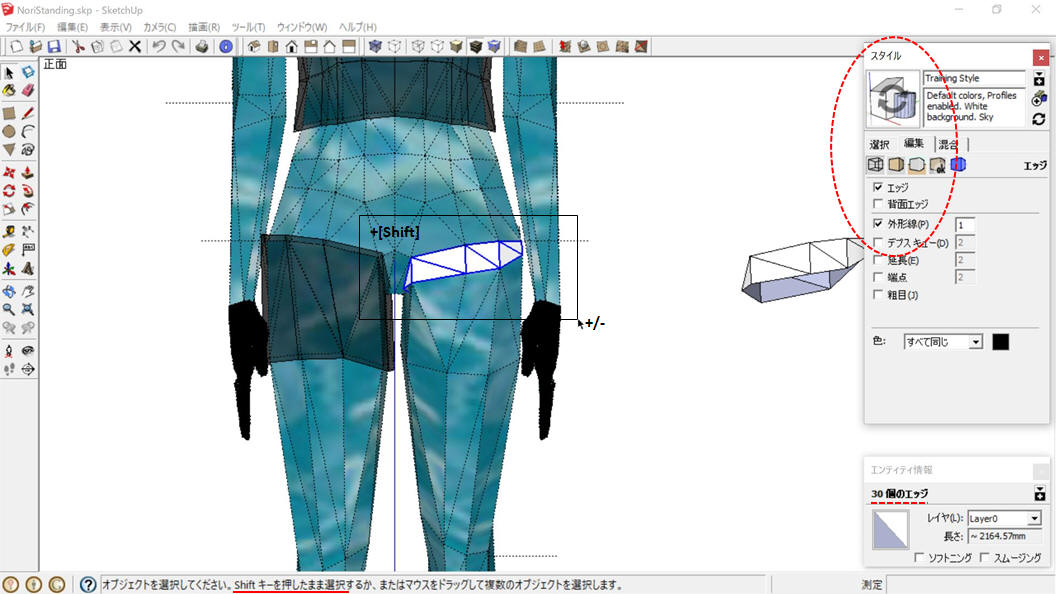
「エッジ」を[非表示]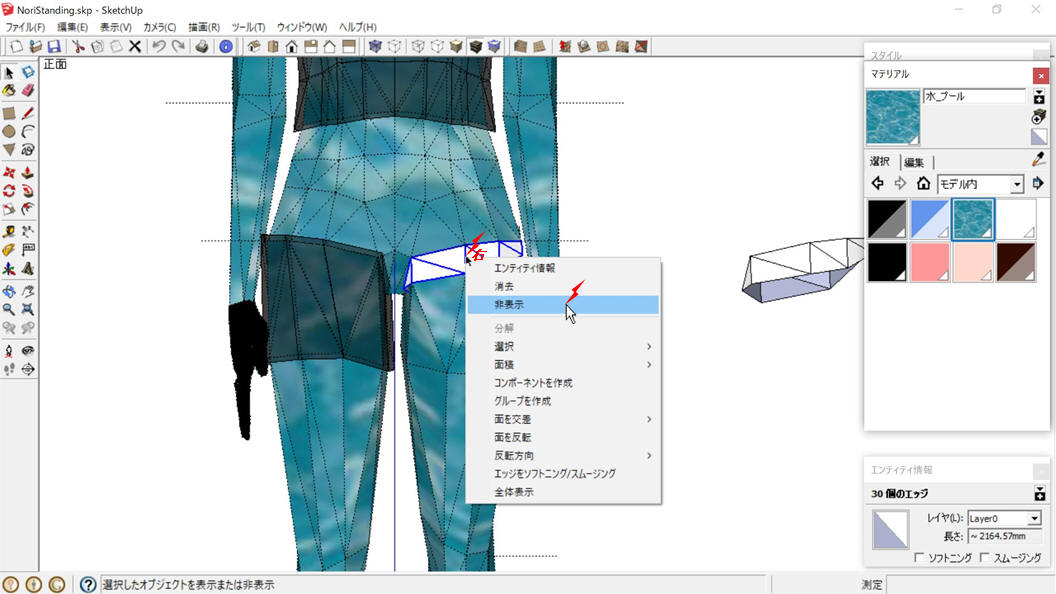
補修部分をオリジナルの色に合わせておきます。
元の位置に戻し、「補修部分」全てを「移動/コピー」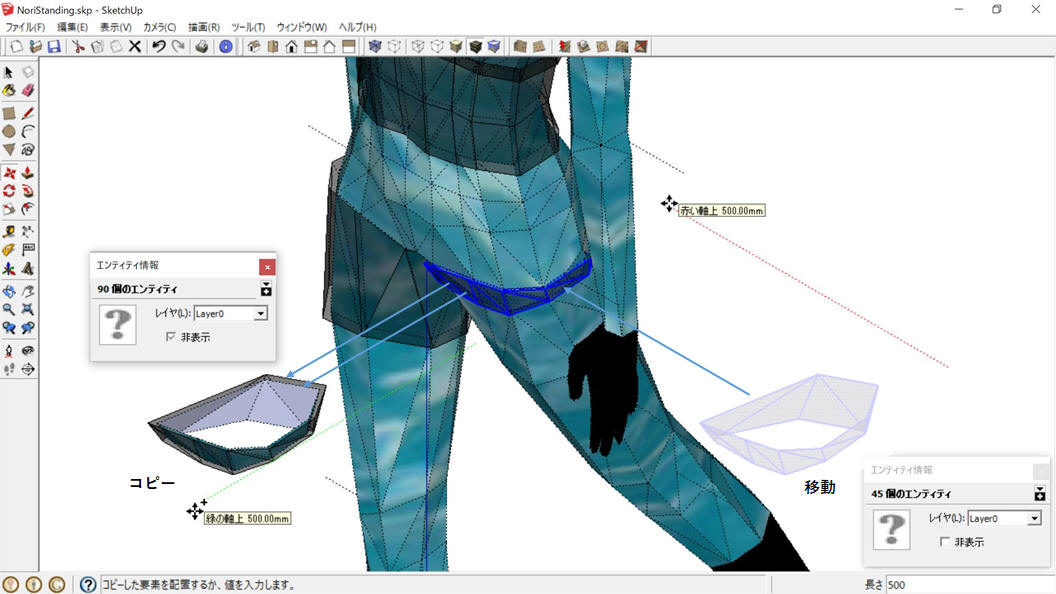
「反転方向[赤の方向]」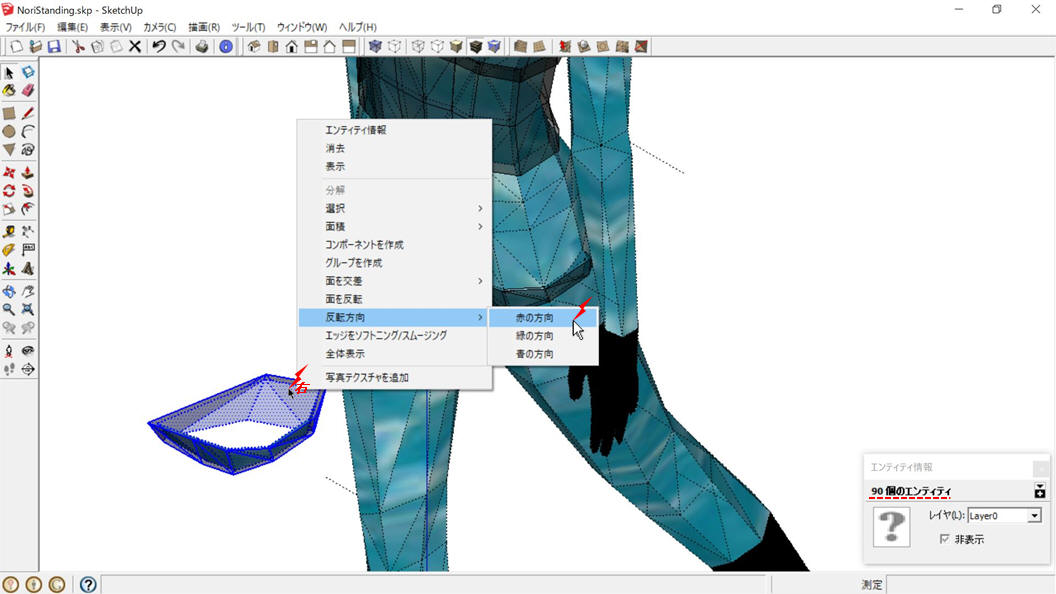
[移動]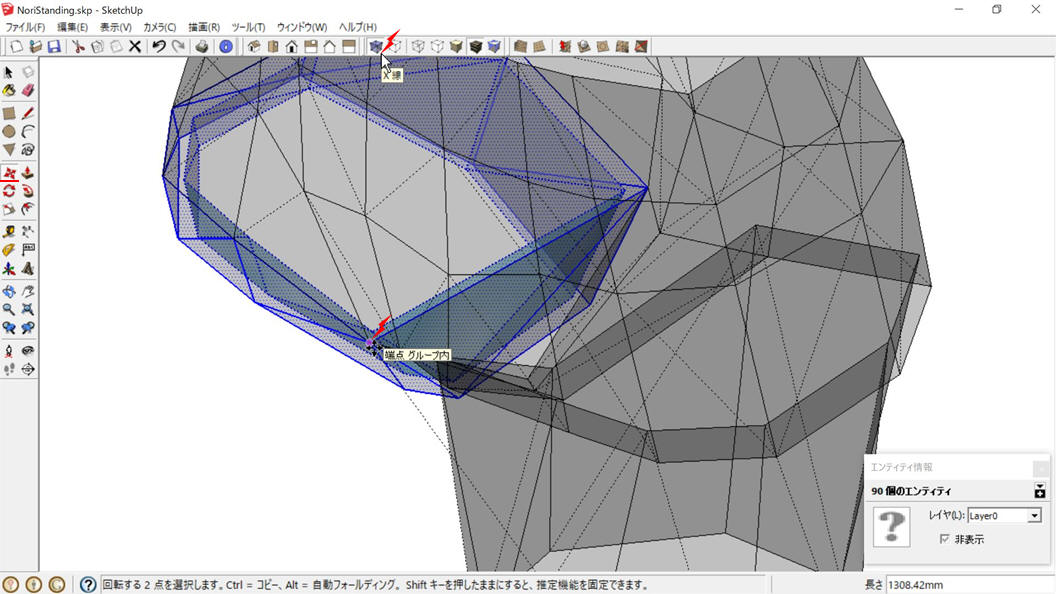
「X線」表示にして、移動先を見つけやすくしています。
元(位置、角度)に戻す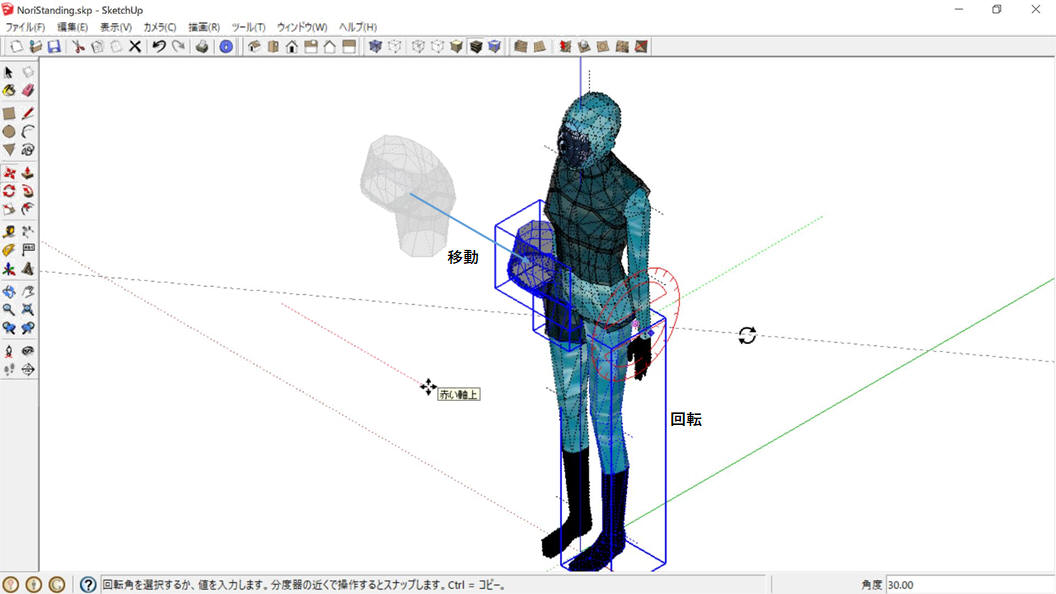
「腰(補修部を含む)[グループを作成]」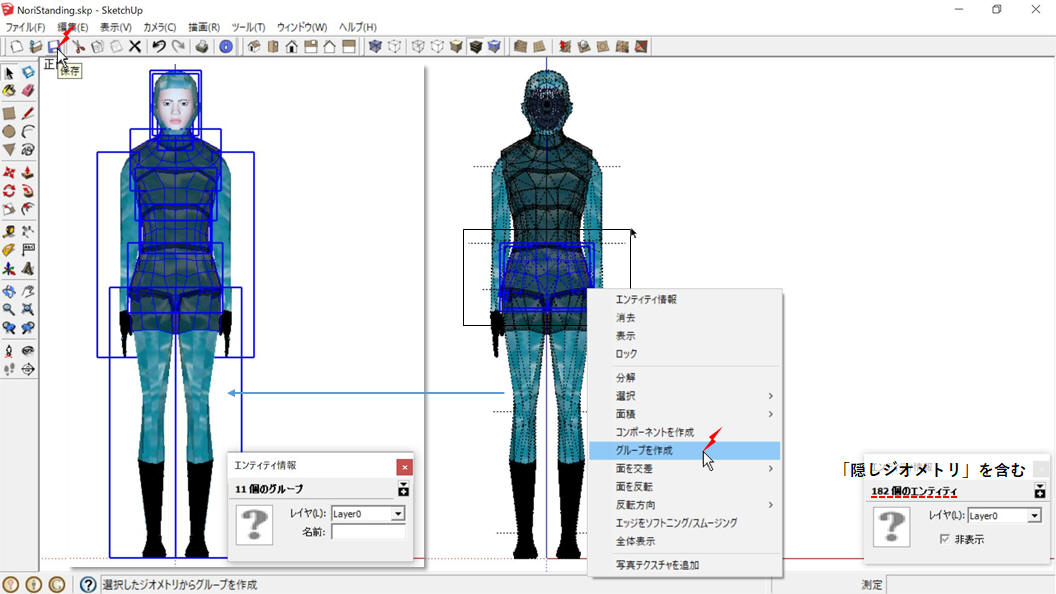
分解した一方の「脚」も再グループ化しています。
ユニホームのデザイン一部変更→[NoriStanding.skp
(最終改訂版)]
「袖」を追加して「腕」とグループ化しています。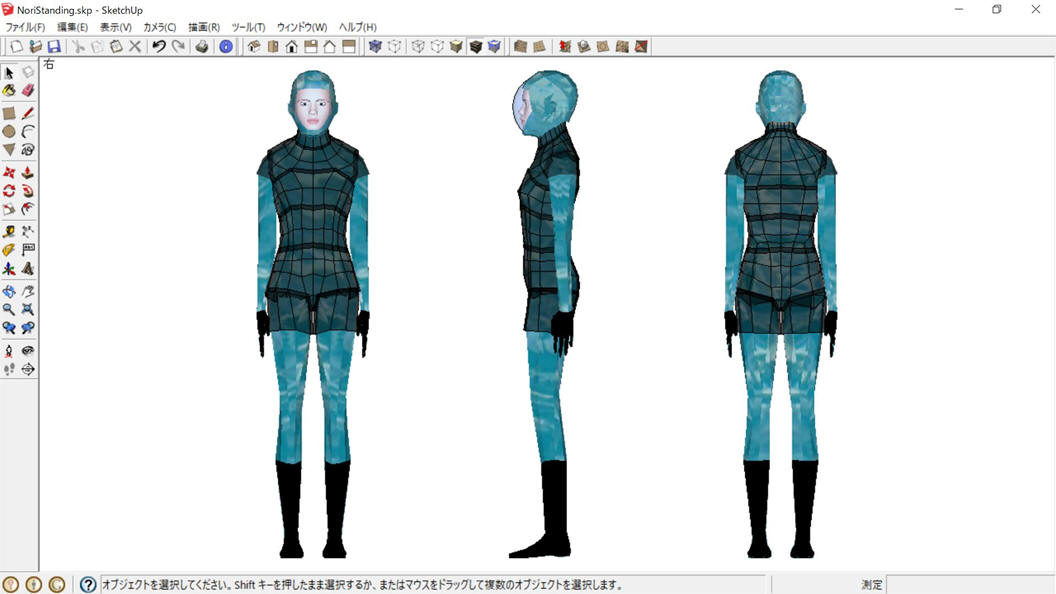
「改訂」の反映
作業中のファイル「NoriWalk.skp」に、変更箇所の差し替えを行います。
レイヤごとに「肩」、「腰」を[消去]
改訂版から「肩」、「腰」、「腕(左右)」、「体幹回転軸」→[コピー/貼り付け(回転軸の端点基準)]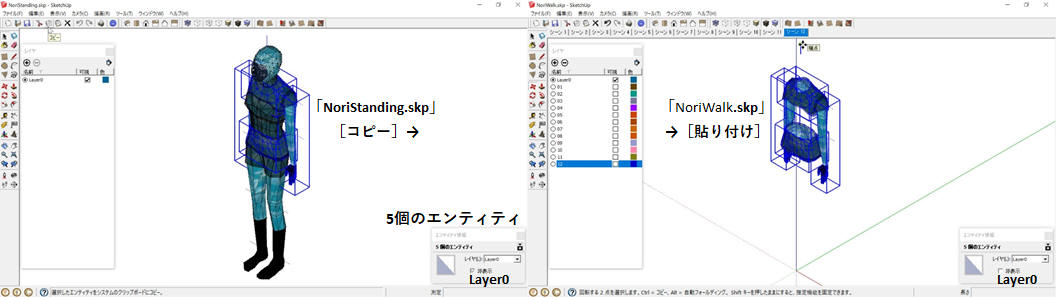
[貼り付け]た「Layer0」のみ[可視]→左右の「腕」、「肩(腕を含む)」、「腰」→表より順に[回転]→[選択]
当該レイヤを[可視]→「腕(肩)」の回転軸を基準に[移動(青軸方向位置合わせ)]
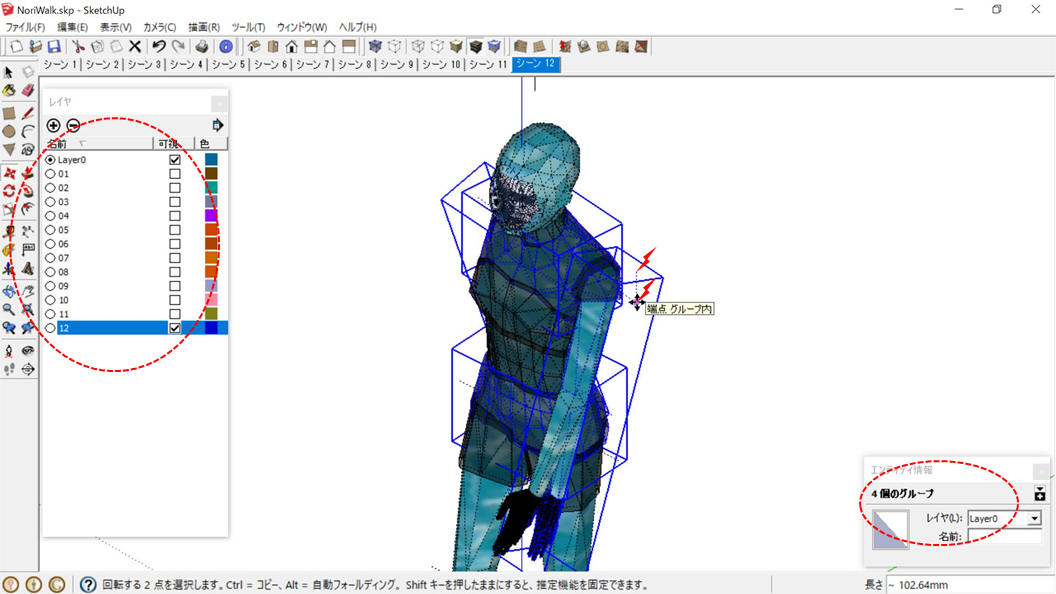
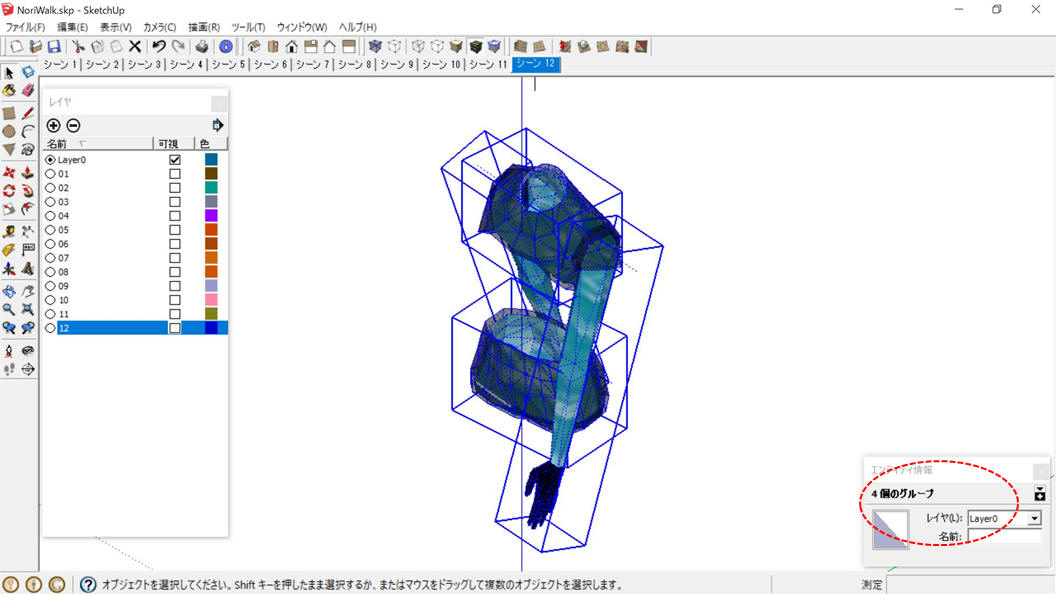
「Layer0」のみ[可視]→「腕(袖を含む)」を編集→グループ内の「腕」を消去(「袖」が残る)
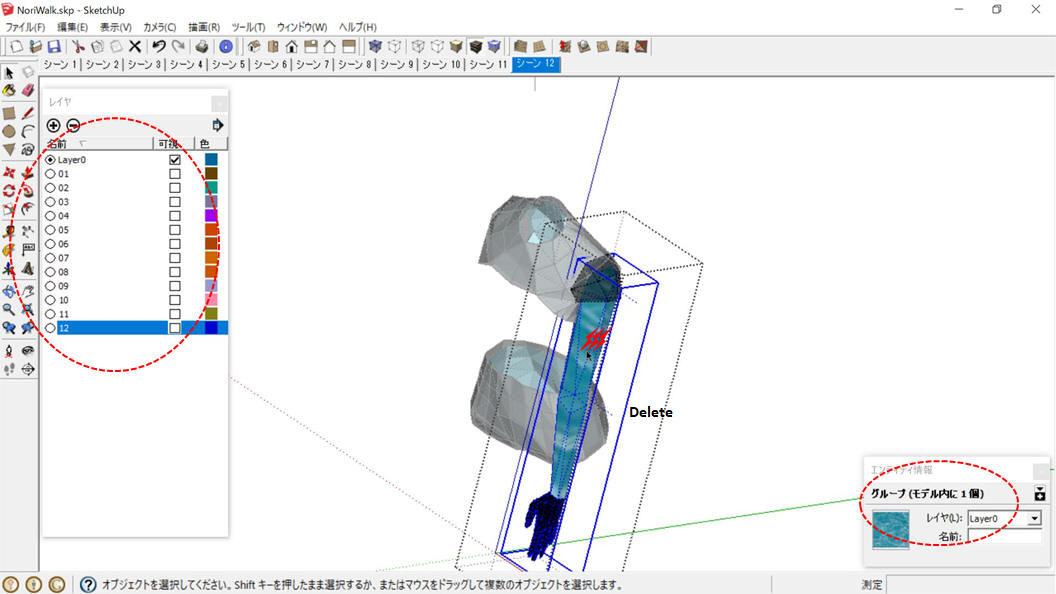
図ではトリプルクリックでグループ内の「腕」を選択しています。
編集を終えた4個のグループを選択して「レイヤ間移動」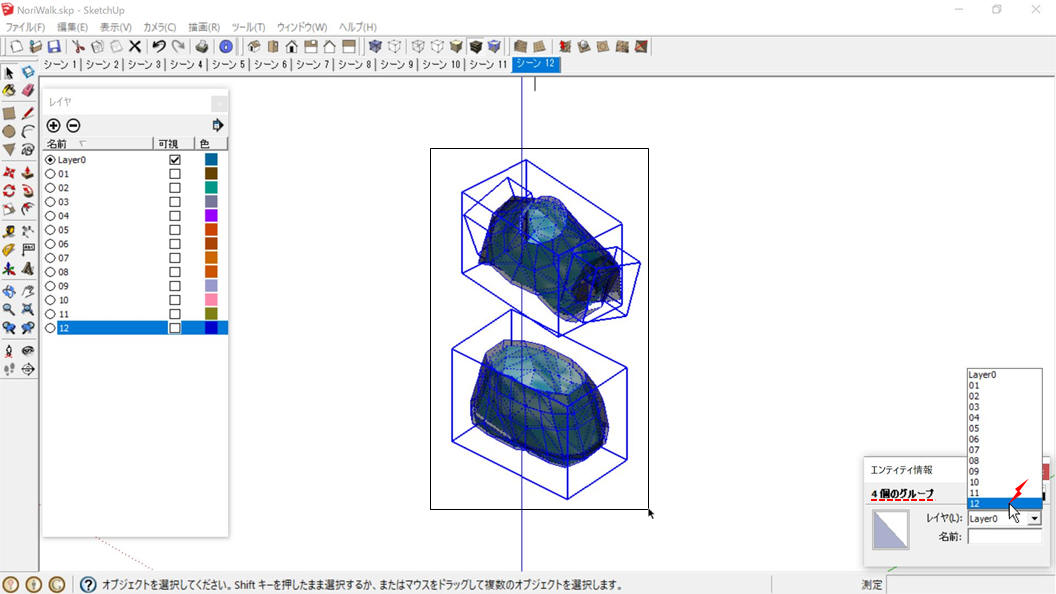
「Layer0」に「体幹回転軸」のみ残っています。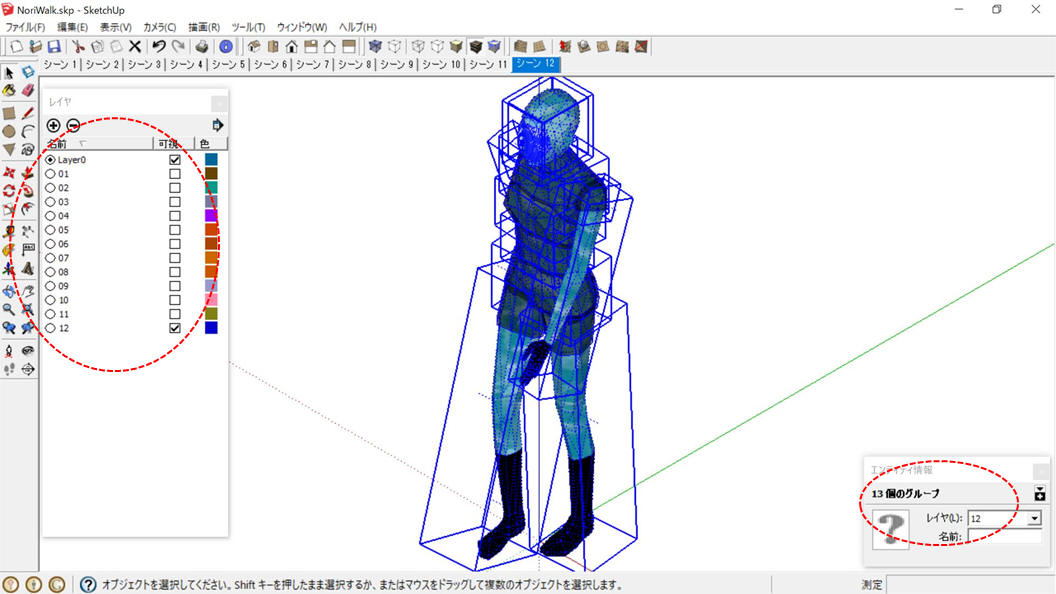
全シーンに同様の作業を行っています。
完成ファイルはコチラ→[NoriWalk.skp 更新2021年10月4日]
「道」の上を歩く
これまでの「人体」の「歩く、走る」は空中で足を動かしている状態で、接地や移動量などを考慮していません。
「道」の上では比較対象(敷石など)により、不具合が見えてきます。
カメラを固定して「人体」を動かしましょう。
標準部品「敷石(8003A-6Banime-toukaku100.skp)」を40倍に拡大して使用しています。
「シーン1」では右脚を踏み出しています。本来、接地していなければならないのですが宙に浮いています。
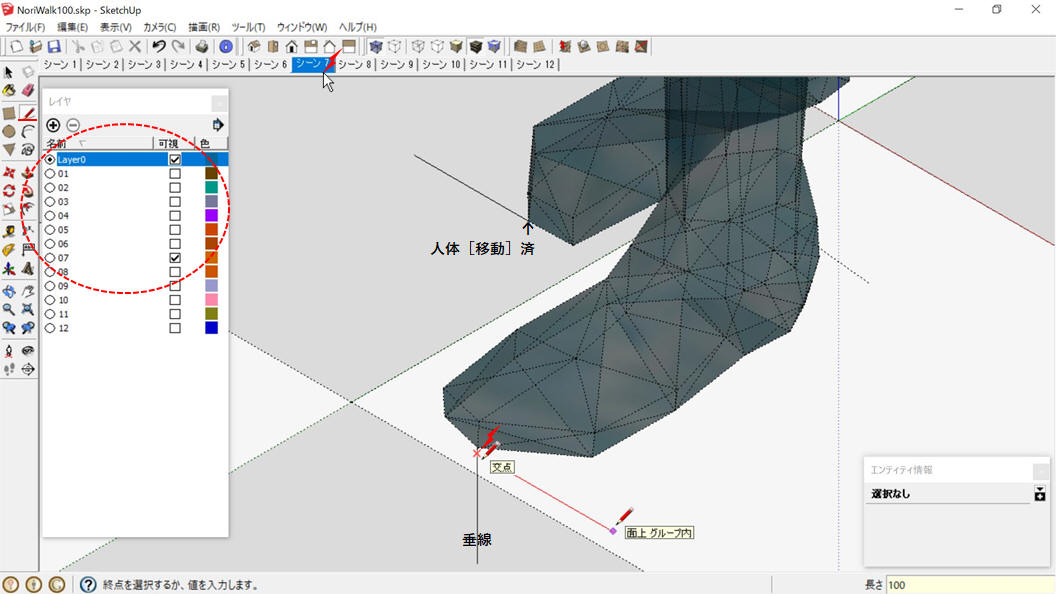
「足」の先端(接地基準点)から垂線を下す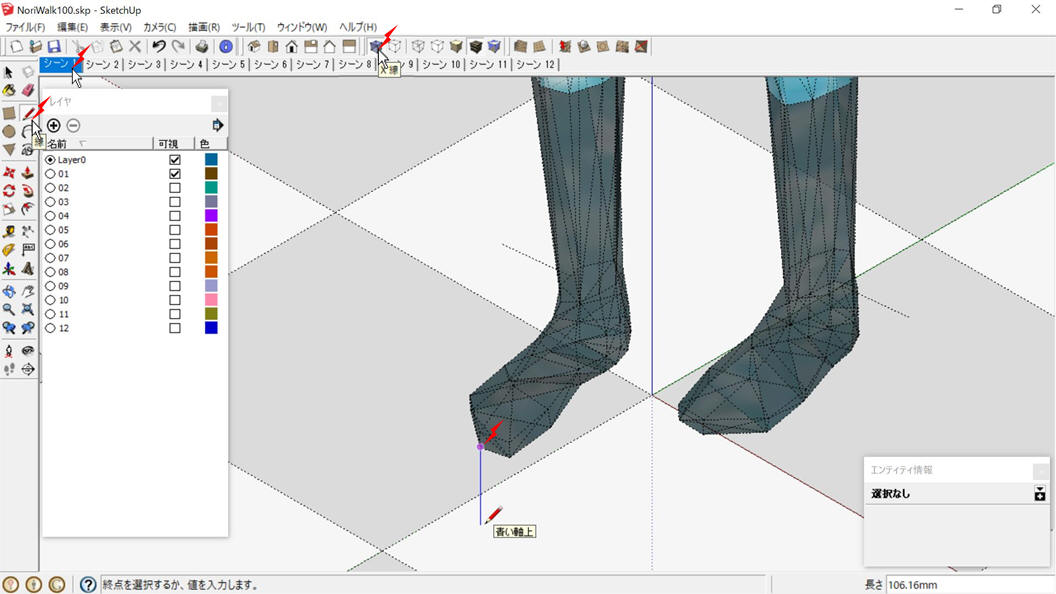
「隠しジオメトリ」表示、[X線]表示で作業しています。
垂線と「敷石(面)」の「交点」から「赤い軸上」方向に「面側接地基準[線(100)]」を引く
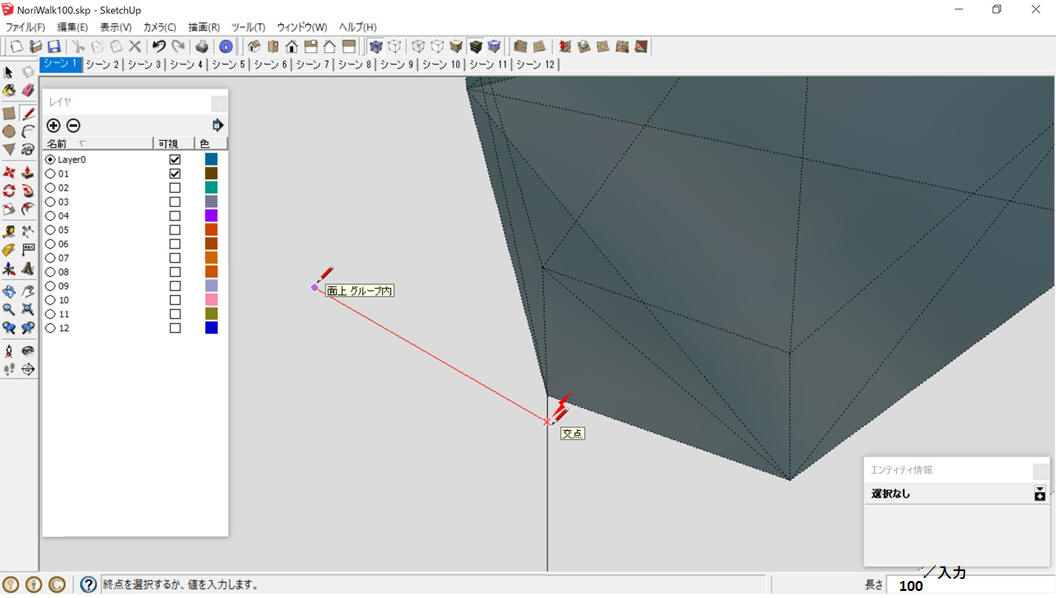
垂線は用済み後[消去]
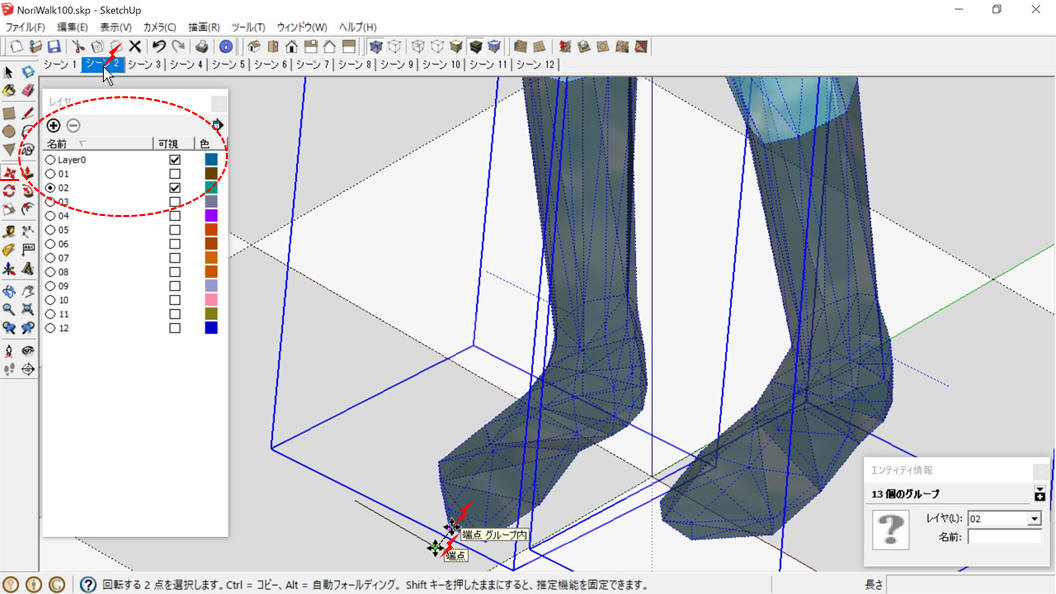
レイヤ[02]のみ[可視]→「人体」を全選択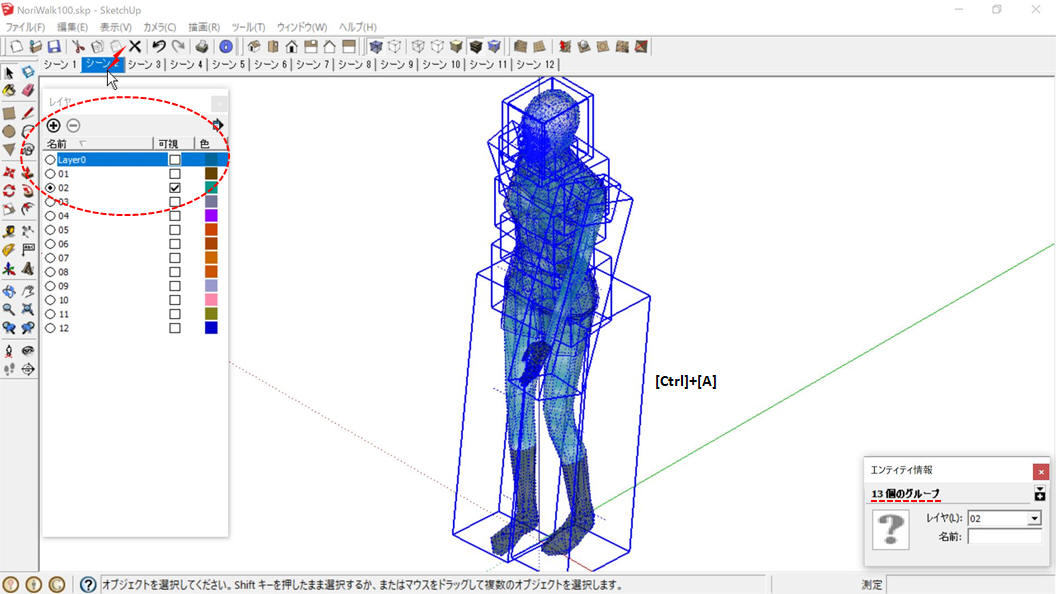
[Layer0]も[可視]→「人体」を前に[移動]、「爪先(接地基準点)」を「面側接地基準点」に合わせる
同様の操作を「シーン7(レイヤ[07])」まで繰り返し、「人体」を前に進める
「シーン7」では左脚を踏み出しています。右脚と同様の手順で「面側接地基準[線(100)]」を引きましょう。
「人体」を前に進める操作を「シーン12(レイヤ[12])」まで繰り返してください。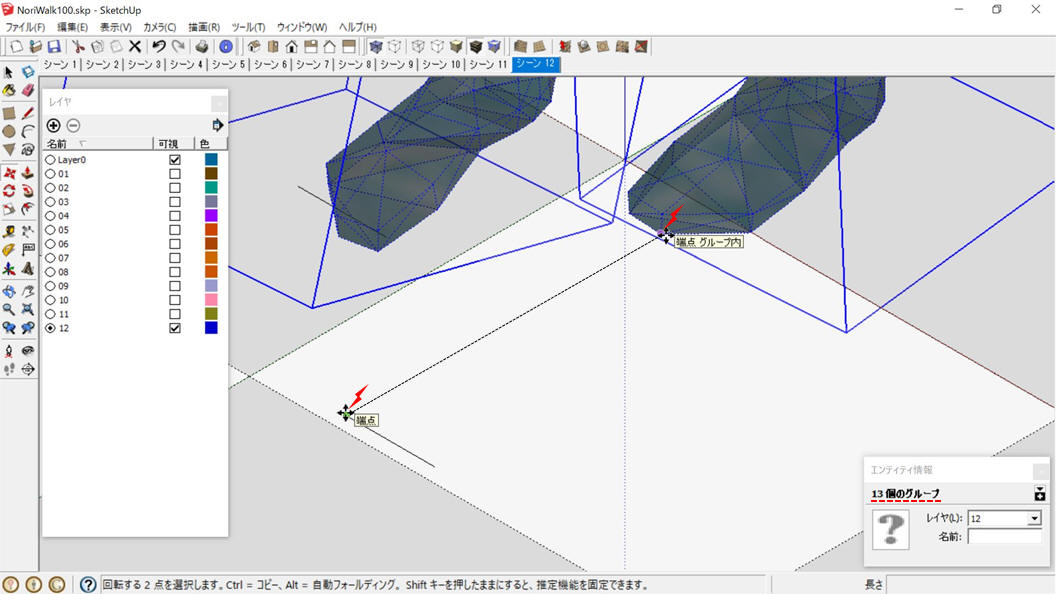
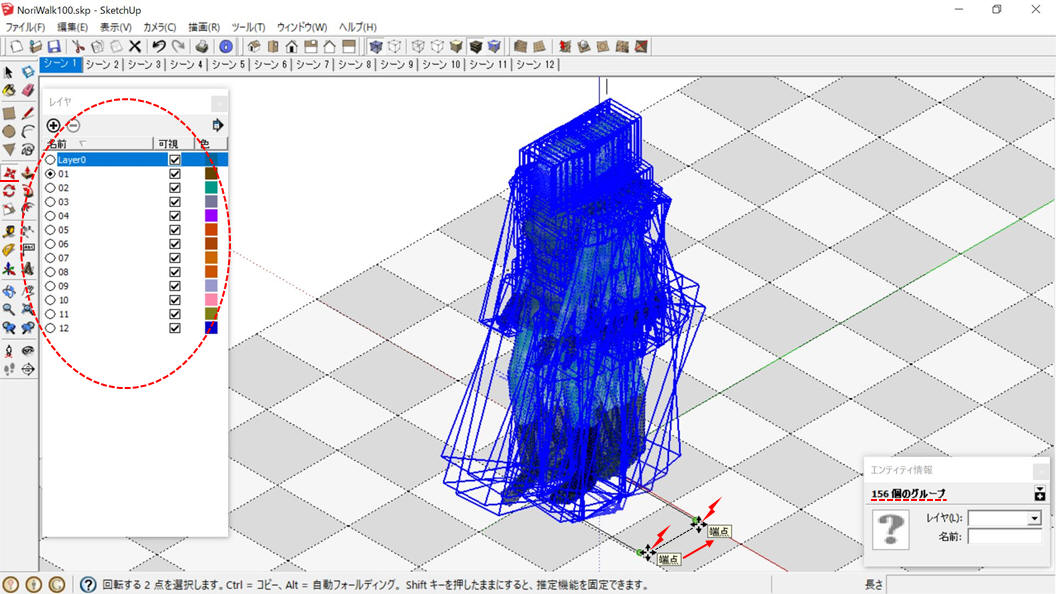
基準線を「隠しジオメトリ」化したうえで、[NoriWalk100.skp 更新2021年10月4日]と名前を付けて保存しています。
一歩前進しました。更に進めて、一歩ごとに別ファイルとして増やします。
「敷石(Layer0)」に移動量を示す補助線を引く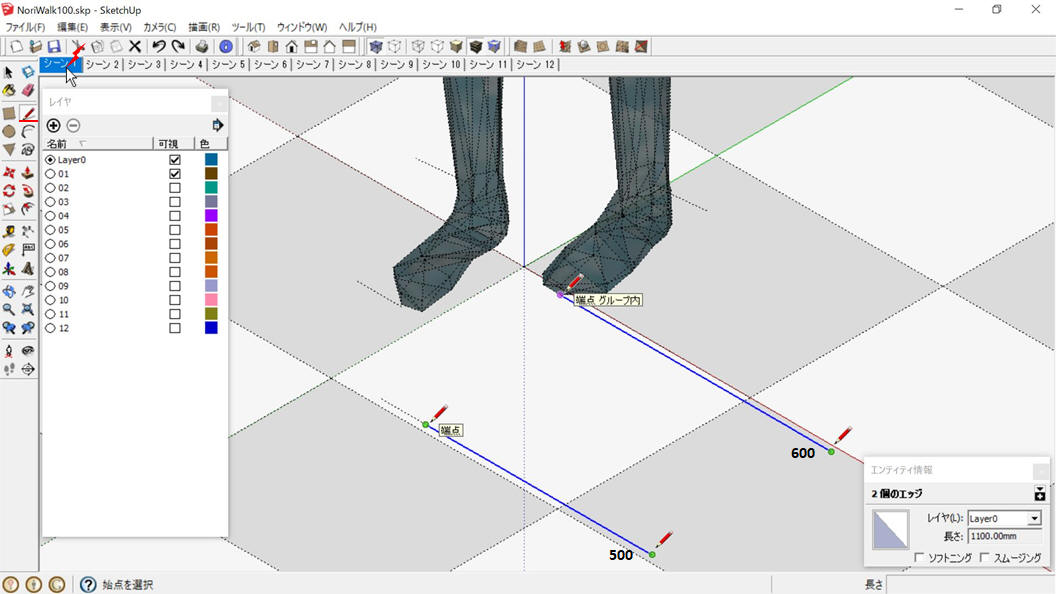
左足つま先の「シーン1(接地点)」と「シーン7(面側接地点)」を基準にしています。
一旦「上書き保存」
「人体(レイヤ01〜12)」を補助線を基準に前に[移動]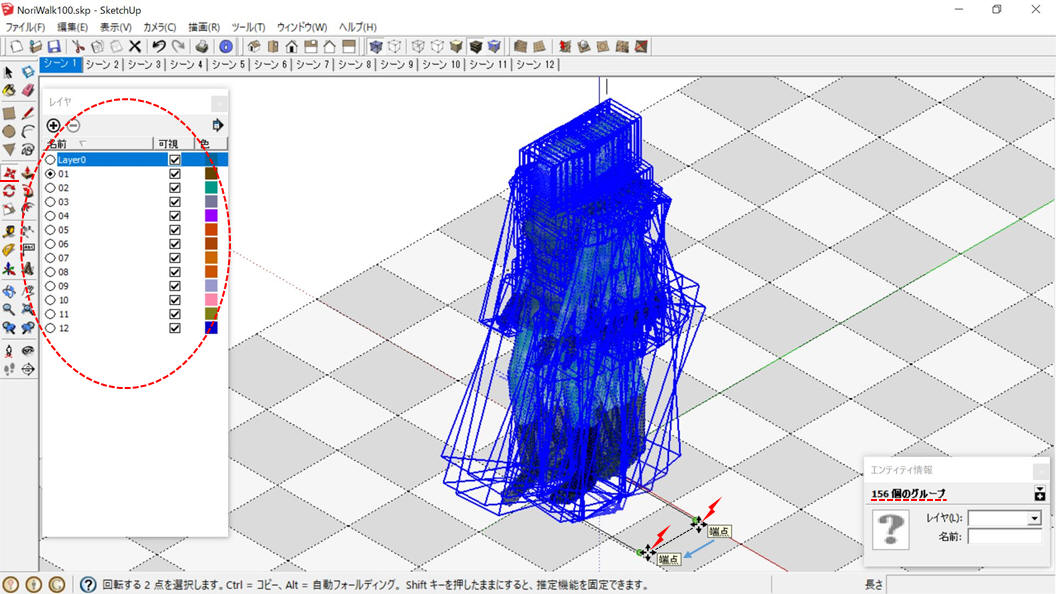
「NoriWalk101.skp」と「名前を付けて保存」、同様の手順で「NoriWalk107.skp」まで連番で作成
再度「NoriWalk100.skp」を開き「人体」を後ろに[移動]、「NoriWalk099〜098.skp」を作成
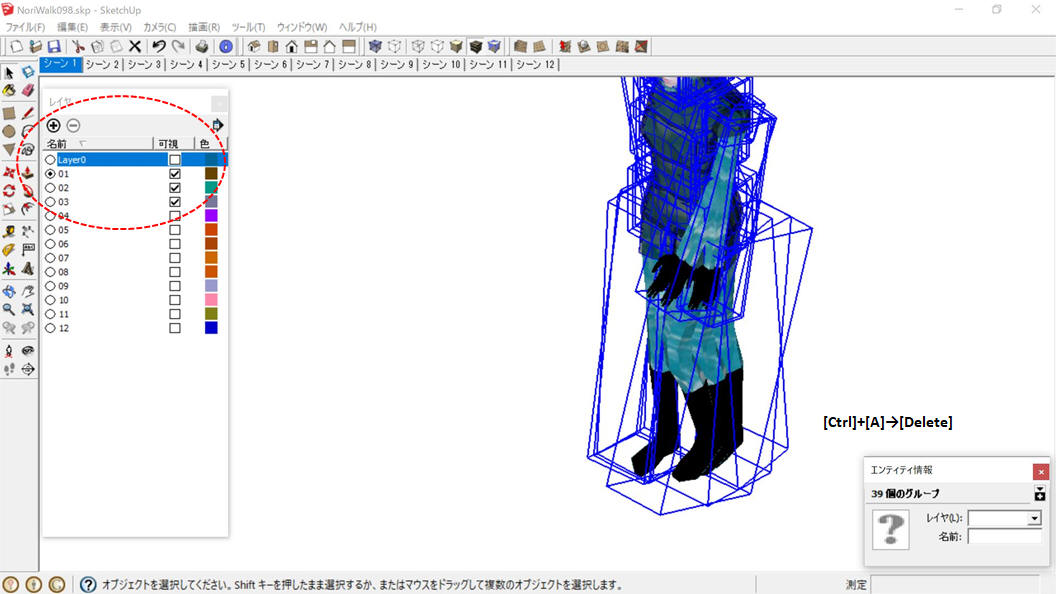
最初の一歩を踏み出すシーンを描きましょう。「NoriWalk098.skp」を編集しています。
「レイヤ01〜03」の「人体」を[消去]
レイヤ[04]の「人体」を「Layer0」に「レイヤ間コピー」
「Layer0」にて「左脚」を、レイヤ[10]の真っ直ぐなものに差し替え
元を[消去]する前に、位置合わせのための補助線を引いています(図では腰の回転軸端点から)。
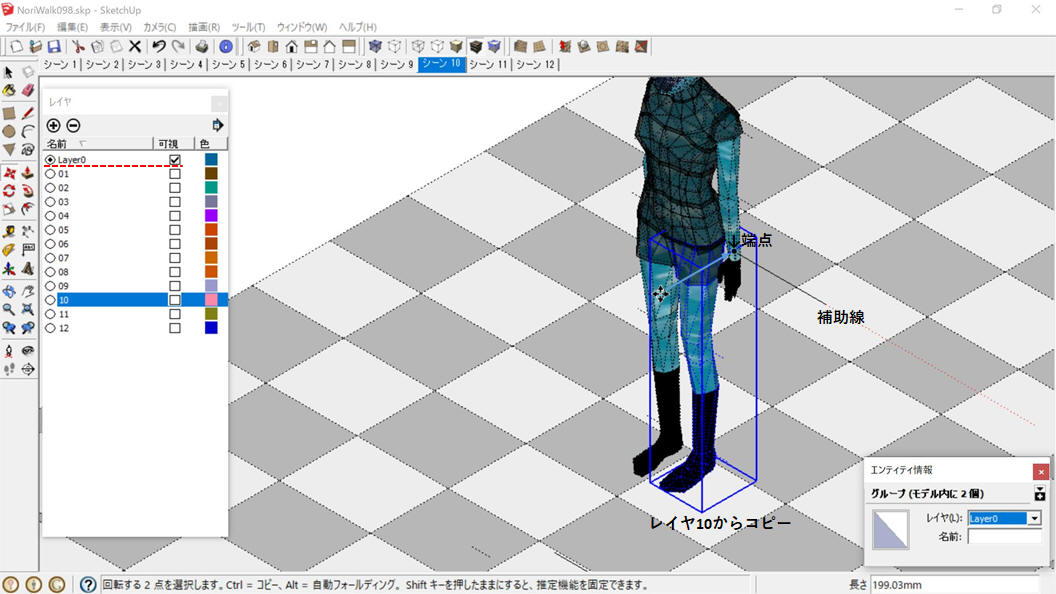
「レイヤ間コピー」→[移動]
編集を終えた「人体」をレイヤ[01,02]に「レイヤ間コピー」、レイヤ[03]に「レイヤ間移動」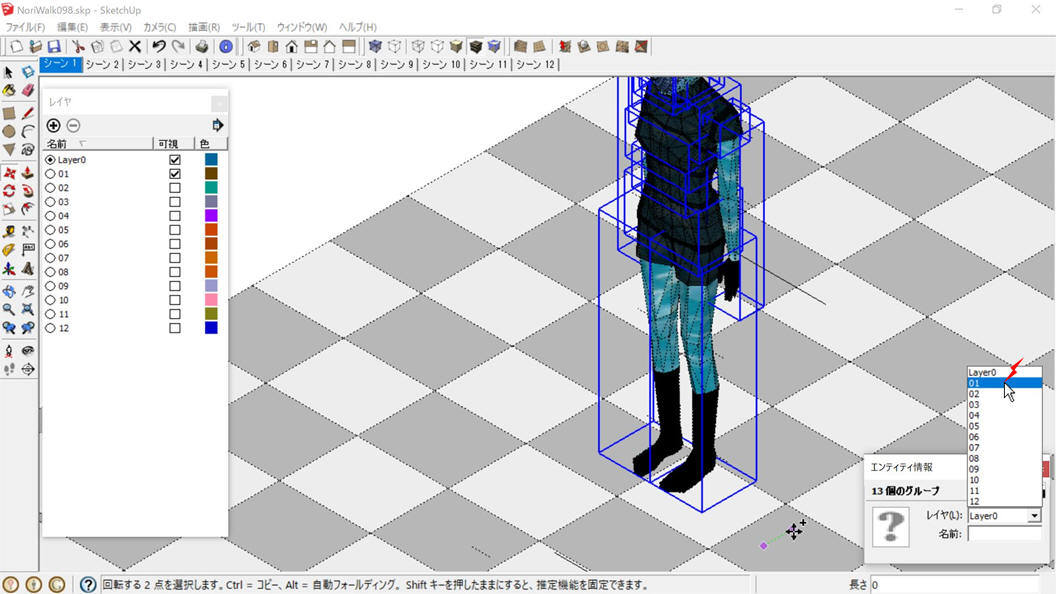
レイヤ[02]、「腕」と「左脚」を[回転]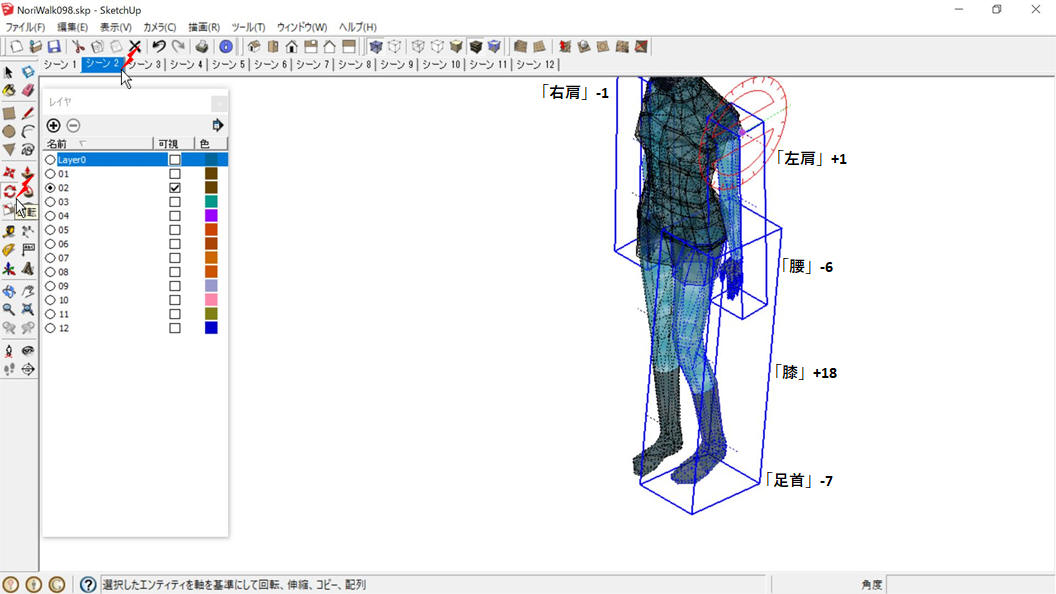
角度は表(腕:当加速、脚:レイヤ[08])から求めています。
レイヤ[03]、角度(脚:レイヤ[09])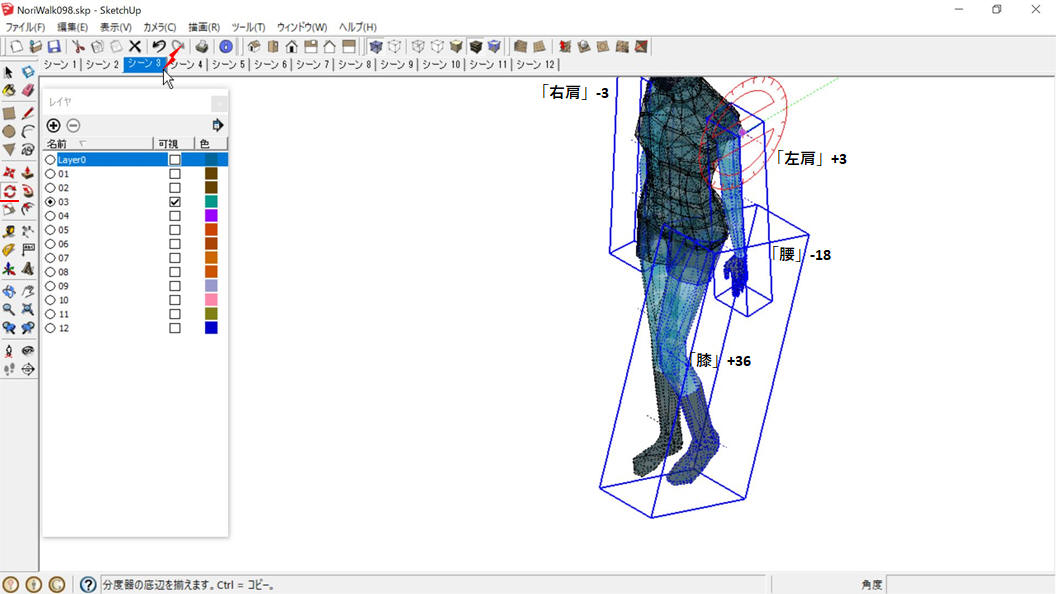
レイヤ[04]、「腕」を[回転]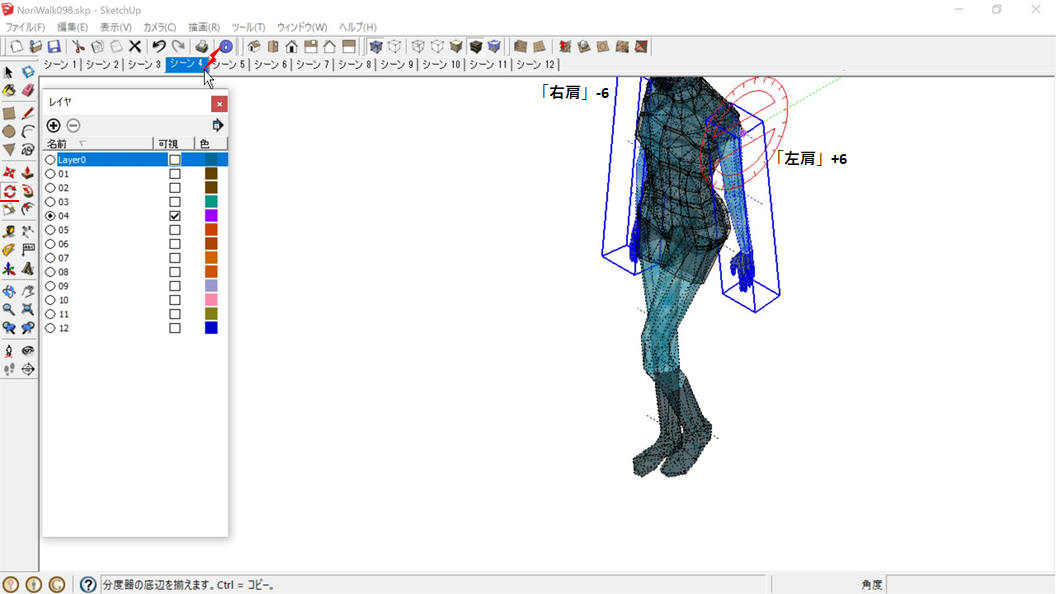
一旦、上書き保存しています。
改訂版を作成
シーン(カメラの位置)を他のファイルに適用
最初、「顔」が見切れています。ここでは「人体」を動かさずに「カメラの位置」を変更しましょう。
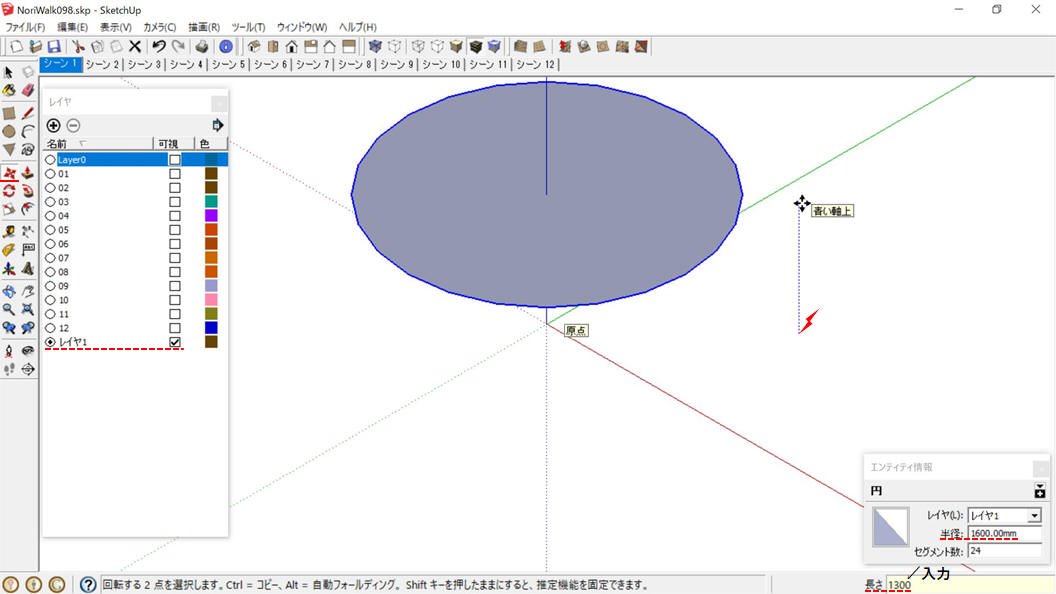
「原点」を中心とし半径1600の[円]を描き上へ1300[移動]
数値は定量化して、標準としたものを適用しています。
「レイヤ1(円のみ)[可視]」→[全体表示]、「シーンマネージャー」で全シーンの[カメラ位置]を更新
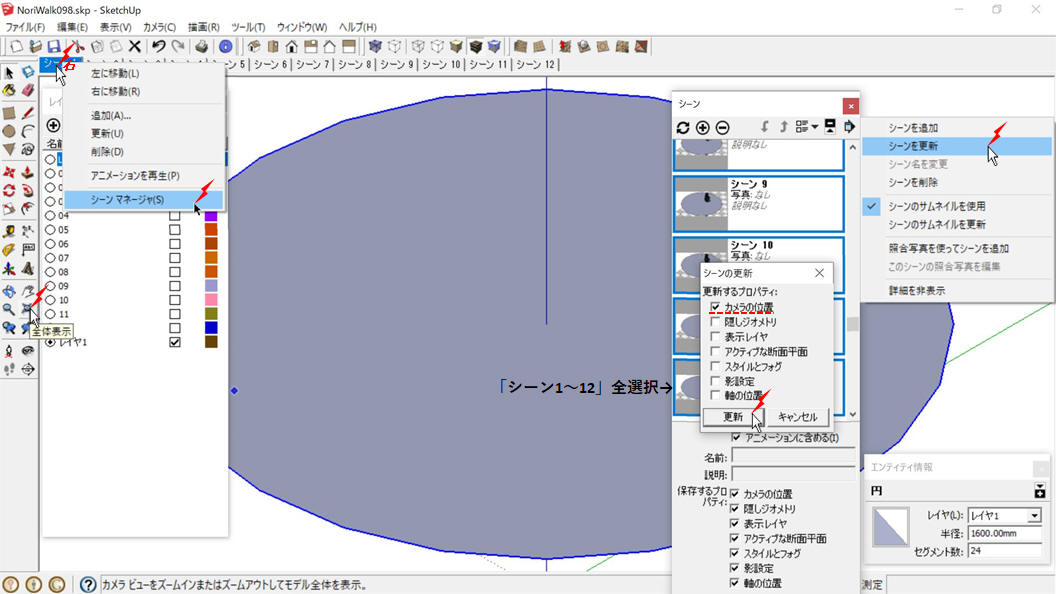
顔が見えるようになりました。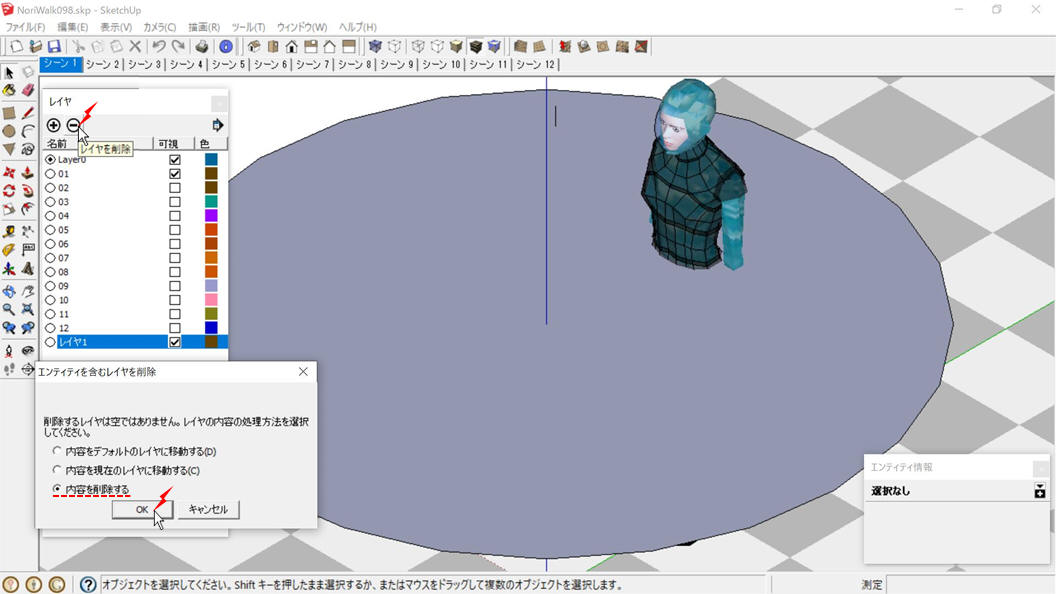
「レイヤ1」を[削除(内容を削除する)]
「NoriWalkStart098.skp」と名前を付けて保存しています。
「NoriWalk100.skp(接地基準線記入済み)」を開き、同様の操作を行ったうえで「NoriWalkStart100.skp」と名前を付けて保存
シーンの仕様を他のファイルに適用するには、エンティティ(描画データ)を全て差し替える方法もあります。
「標準」以外のシーンのコピー(複製)に便利です。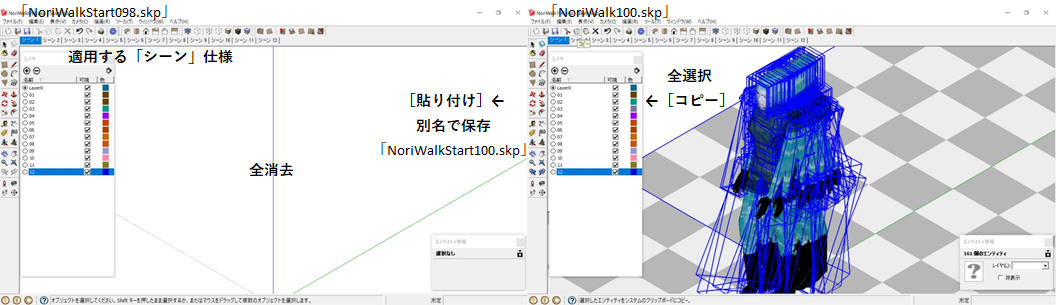
図では右のファイルに左のファイルのシーンをコピーした、新しいファイルを作成しています。
シーンの構成(レイヤ名を含む)が揃っていれば、シーンの[更新]の必要はありません。
改訂版からパターン作成
連続表示すると蛇行していることが分かります。個性的(モンローウォーク?)ですが「行進」にそぐわないので、更に改定を進めます。
シーン1(レイヤ01)にて、「右脚」を選択し「グループを編集」→更にグループ内の下のグループを選択し「グループを編集」
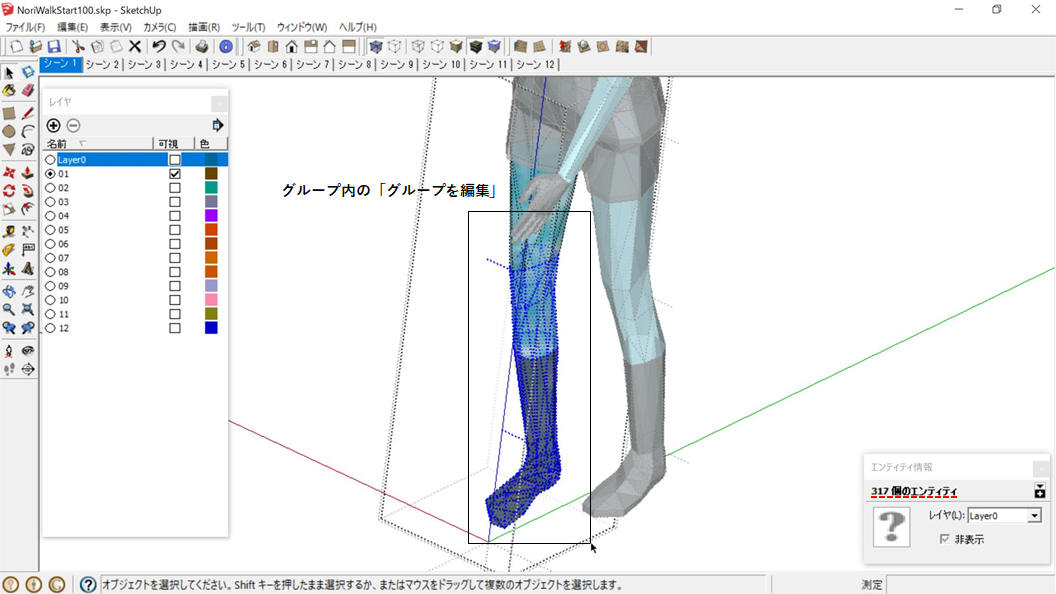
膝から下を選択、エンティティの個数はレイヤによって違います。
かかとを中心に[回転(-6)]
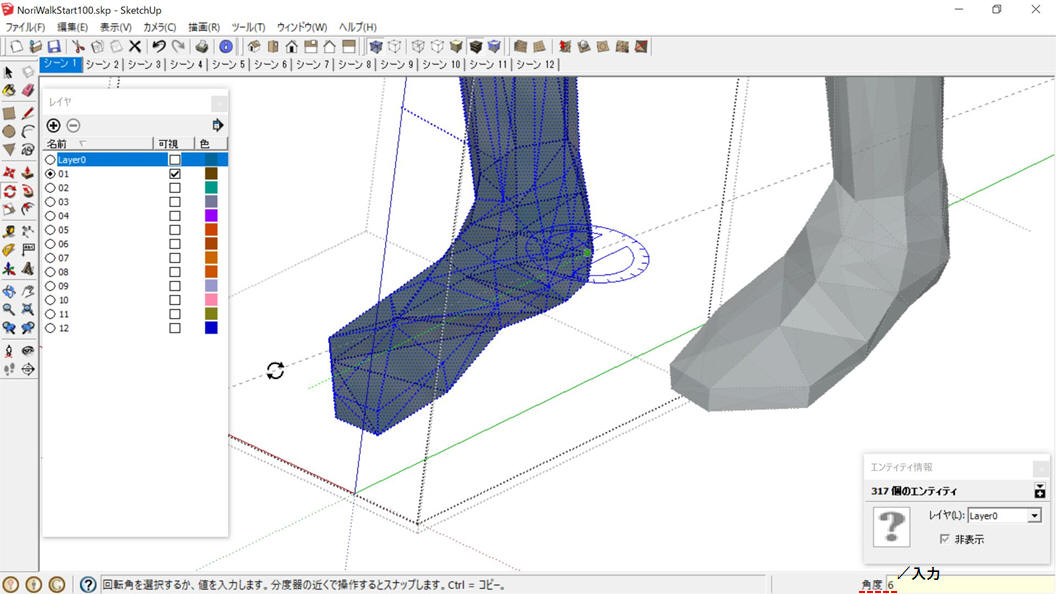
角度は「表」より、対応レイヤの「肩」の値
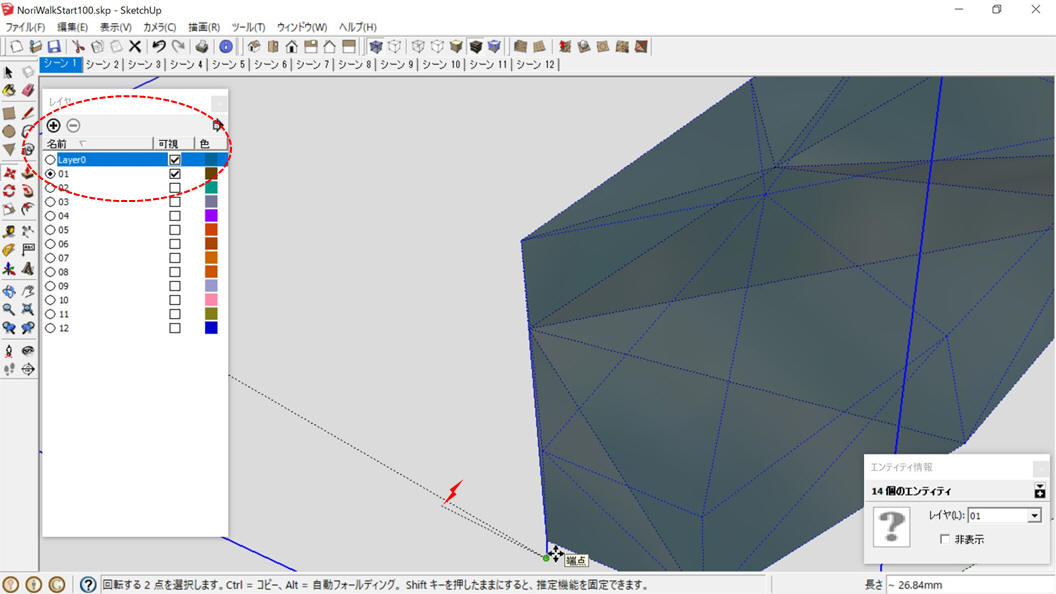
「足」の先端(接地基準点)から垂線を下す
「レイヤ[01]」のみ[可視]として「全(人体、垂線)選択」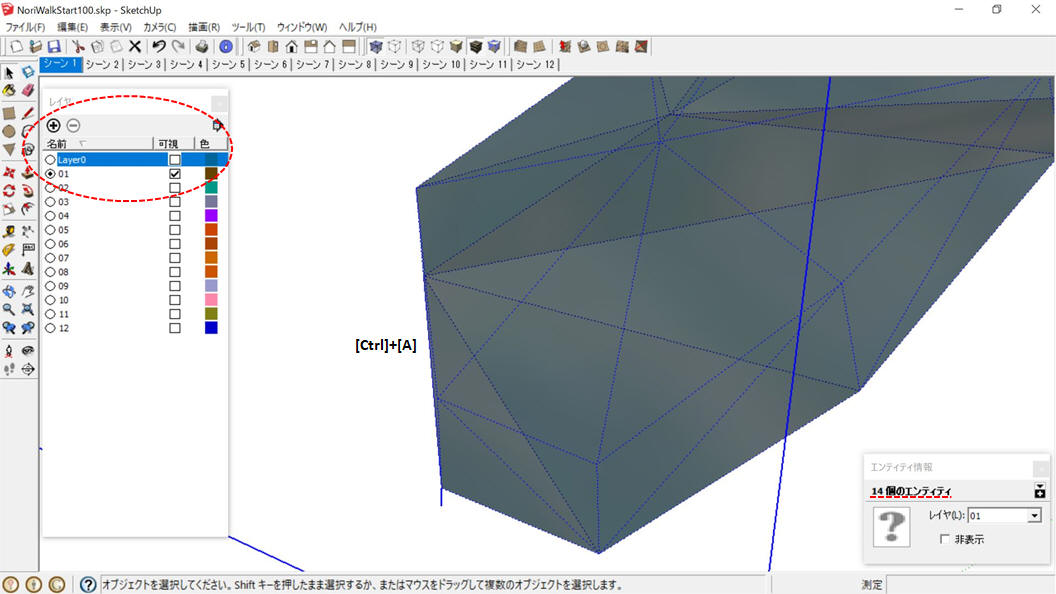
「垂線(下側端点)」を「接地基準線(内側端点)」に合わせて「人体」を[移動]
同様に「右脚」にたいする「一連の操作(位置合わせの「垂線」は不要)」を、表に合わせて「レイヤ[06]」まで行う
「左脚」も「レイヤ[07(要垂線)]〜[12]」で同様の操作を行う
一歩ごと進める別ファイルを作るために、移動量(左右接地基準線の間隔の倍)を示す補助線を引きます。
補助線を「非表示(隠しジオメトリ)」にして、「上書き保存[NoriWalkStart100.skp]」
前述の手順で「人体」を前に[移動]した「NoriWalkStart101〜107.skp」、後ろに[移動]した「NoriWalkStart099.skp」を作成
保存した「NoriWalkStart099.skp」の「レイヤ[05〜12]」の「人体」を、更に後ろに[移動]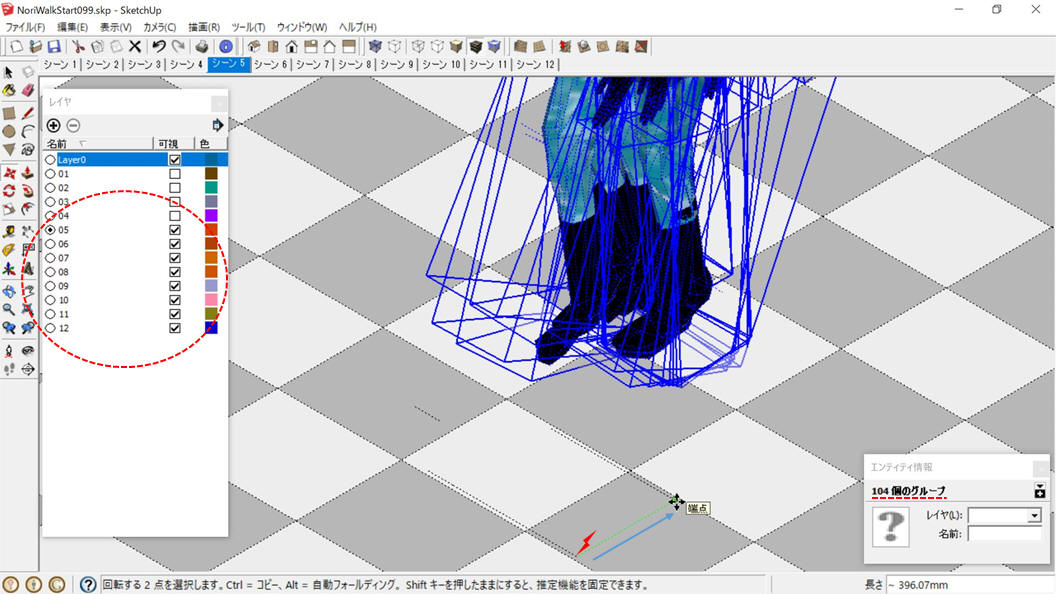
先に保存した「NoriWalkStart098.skp」から「位置合わせ用補助線」と「レイヤ[01]〜[04]」の「人体」を[コピー]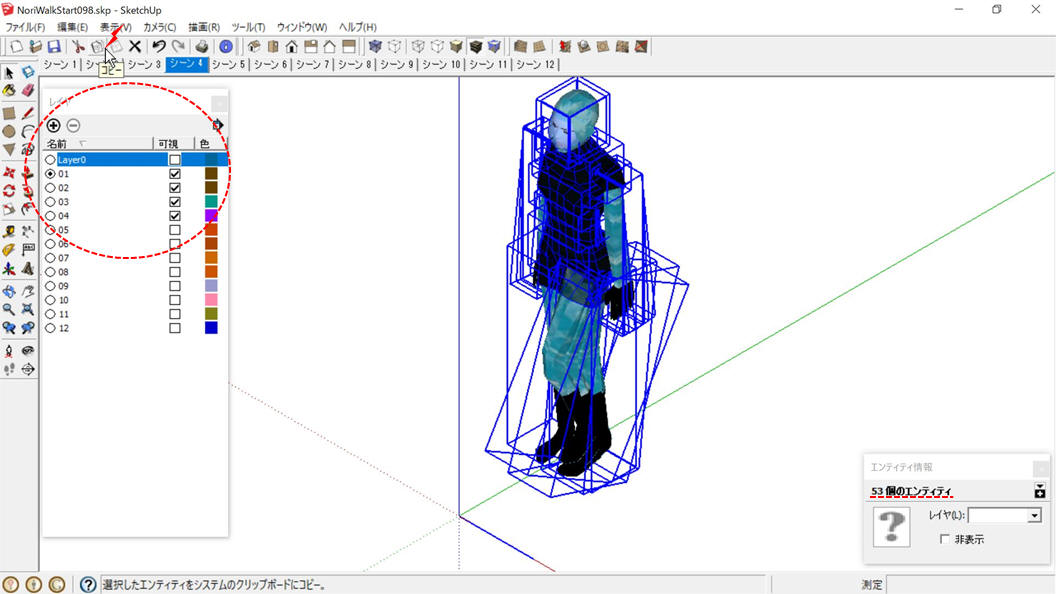
「NoriWalkStart099.skp」の「レイヤ[01〜04]」の「人体」を[消去]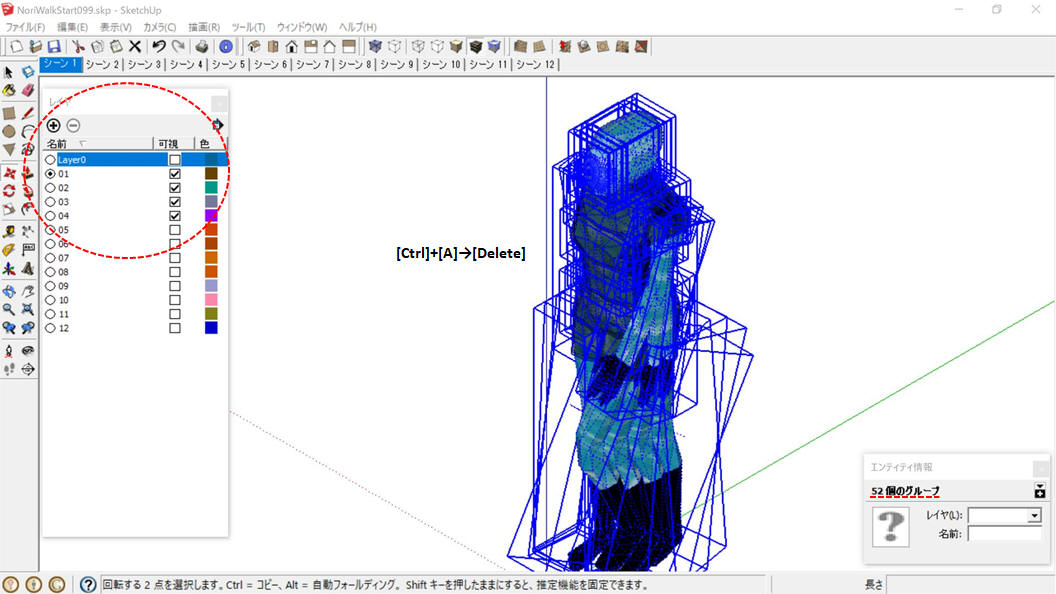
[貼り付け]、補助線[消去]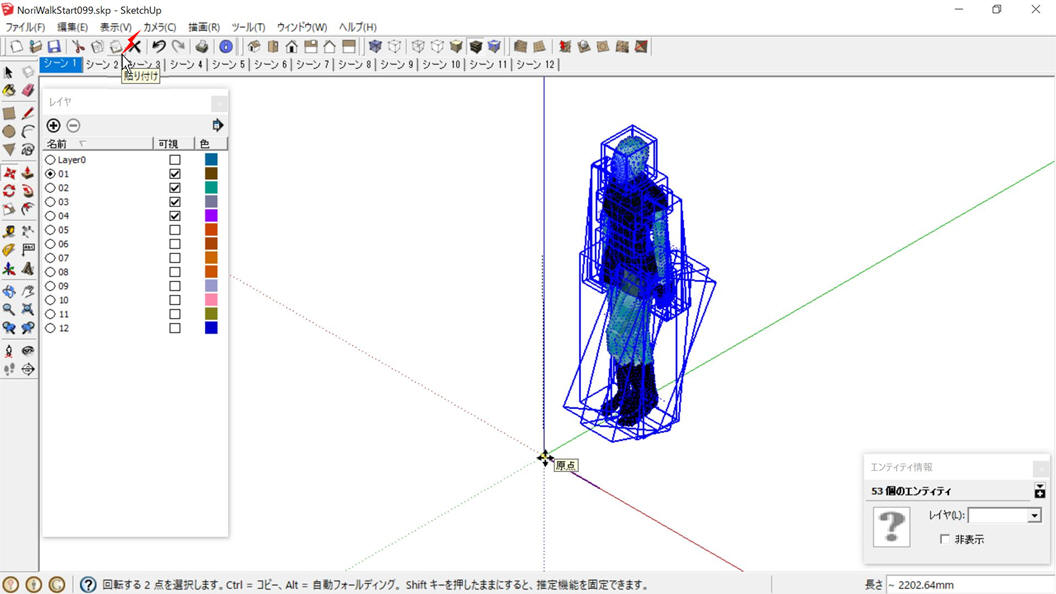
ファイル名「NoriWalkStart098.skp 」で「上書き保存」
「NoriWalkStart098〜107.skp」で、歩き始め(足を踏み出す)からフレームアウトまでを一つのパターンにしています。
[NoriWalkStart100.skp]を開いてください。フレームインから歩き終わり(立ち止まる)までのパターンを作成しましょう。
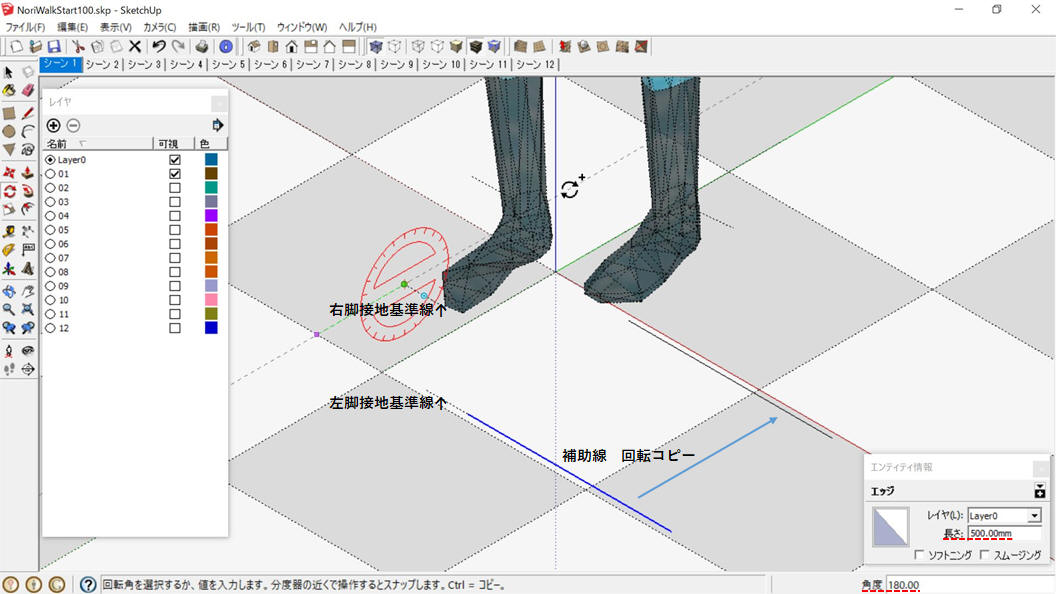
レイヤ[01]と[12]の「人体」の中間に「垂線」を立てる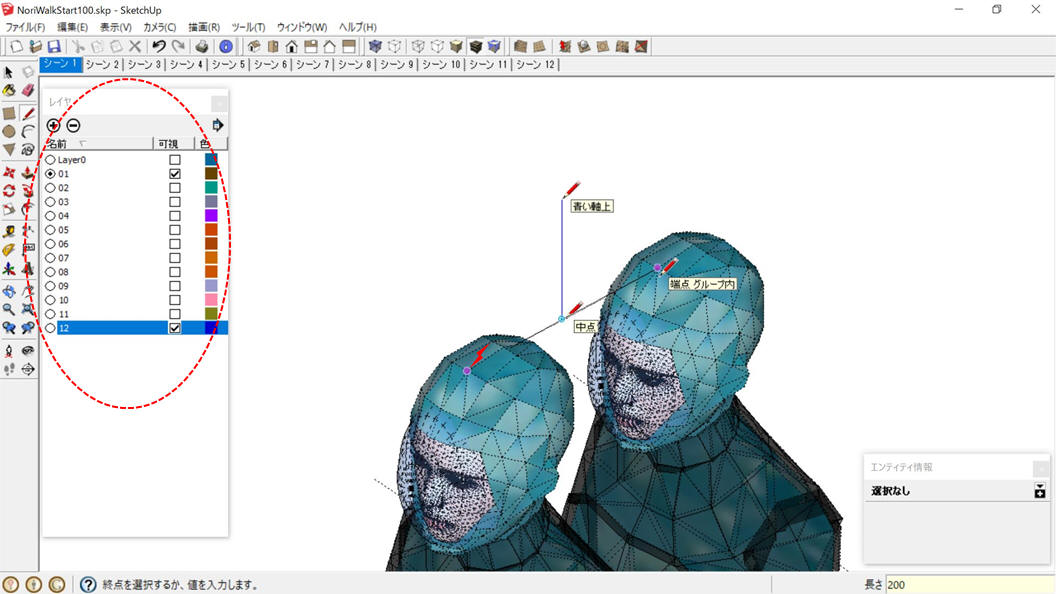
図では「人体」の頭頂部の同じ点をつないだ直線の「中点」から引いています。
レイヤ[01〜12]の全「人体」を「補助線」を基準に[回転[180]]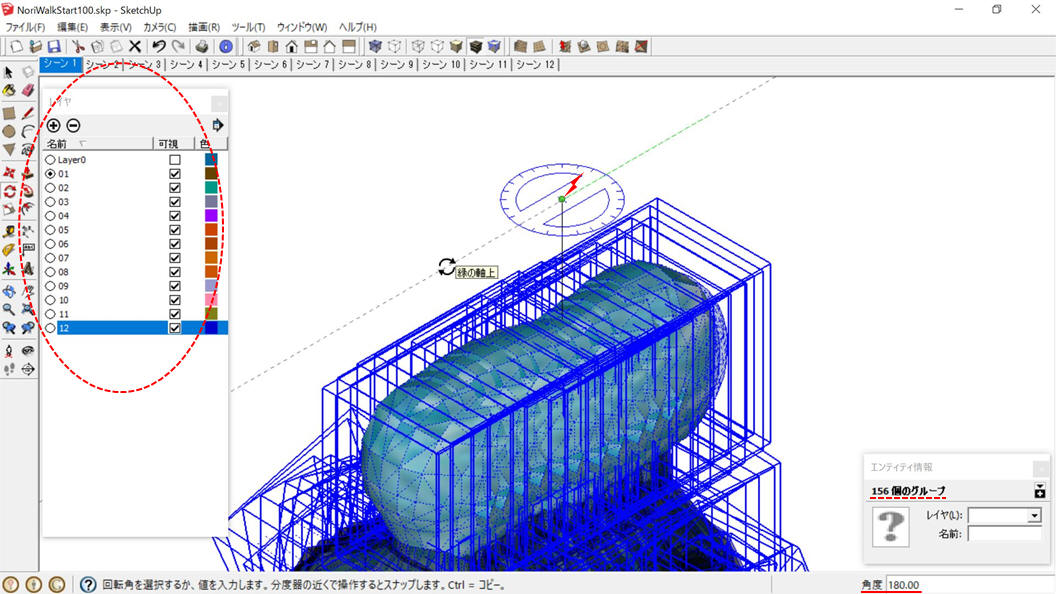
「NoriWalkStop100.skp」と名前を付けて保存
前述の手順で「人体」を逆順に進めた「NoriWalkStop099〜093.skp」を作成
再度「NoriWalkStop100.skp」を開き「人体」を前進[移動]、「NoriWalkStop101、102.skp」を作成
「NoriWalkStop102.skp」の終わりで行進風の「止まれ」
「レイヤ[11、12]」の「人体」を[消去]、「レイヤ[13]」を追加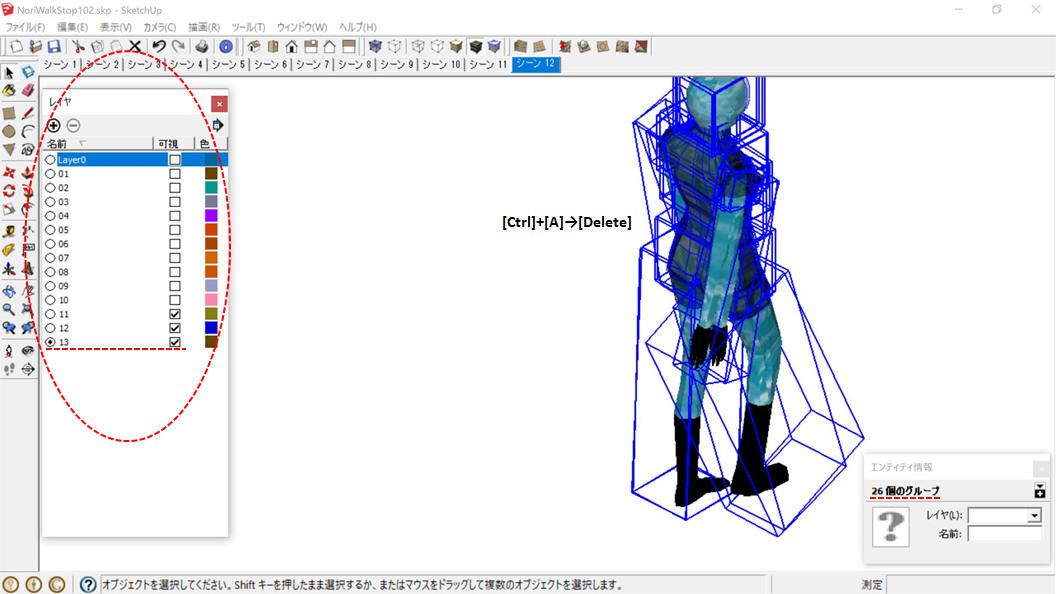
「NoriWalkStart098.skp」を開いてください。
最初の一歩「レイヤ03〜01(逆順)」をコピーして、作業中のファイルの「レイヤ[11〜13]」に貼り付けます。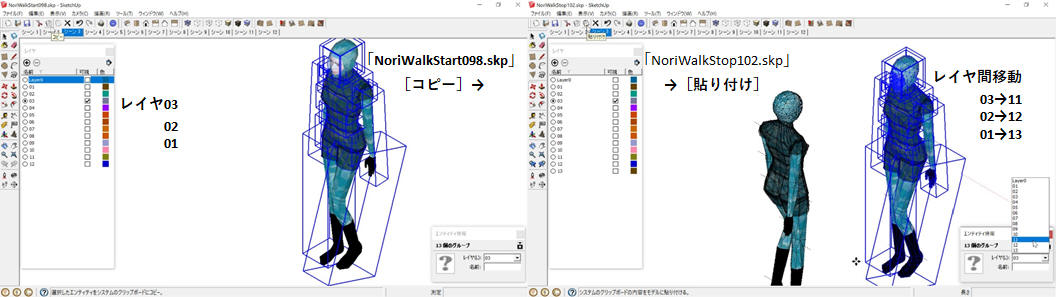
レイヤ[10]の位置(頭の頂点から立ち上げた補助線)に合わせて[移動]、「回転(180)」
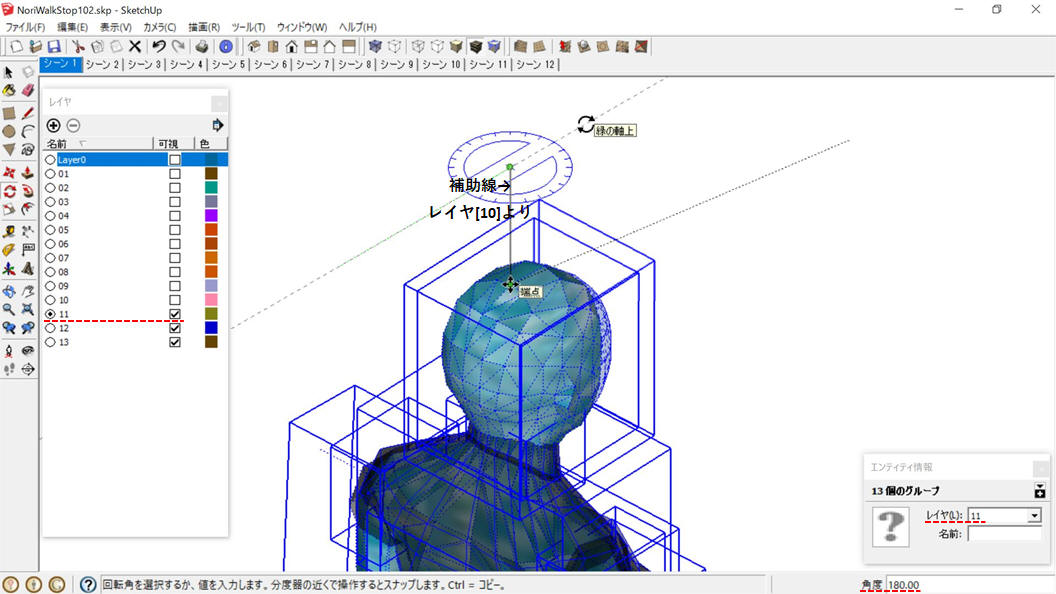
同様の操作を「レイヤ[13]」まで行う
レイヤ[11、12]の「人体」を[縮尺]で「ミラー反転(赤の尺度 中心を基準 -1.00)」
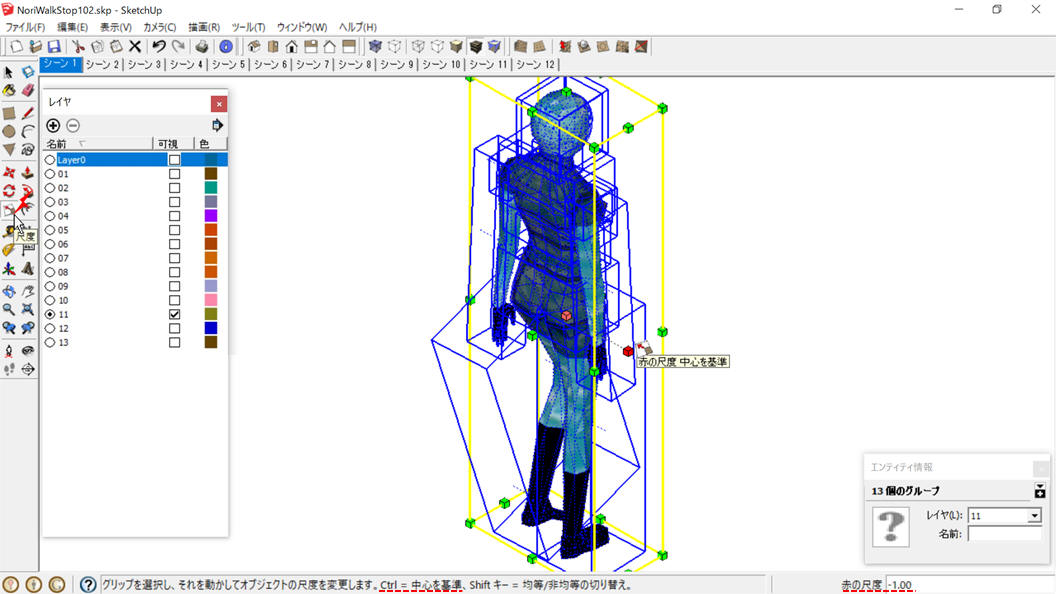
この方法では「人体」が左右対称でないため、上部の模様が再生時つながりません。(ここでは無視 =^x^;=)
レイヤ[13]の「人体」を[11、12]に「レイヤ間コピー」して、動きを付ければ回避できます。
レイヤ[13]を[可視(OFF)]にして「シーン1〜12」を[更新]、レイヤ[13]を[可視(ON)]にして「シーン13」を[追加]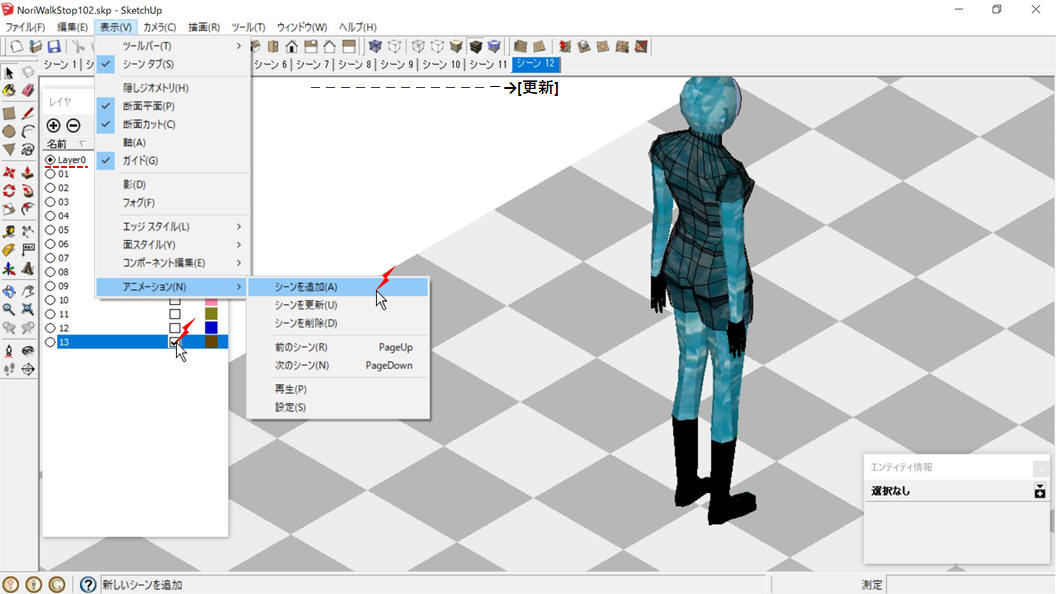
「右脚(膝)」を[回転]、レイヤ[11]で+9、レイヤ[12]で+6戻す
数値は「表」から探っています。
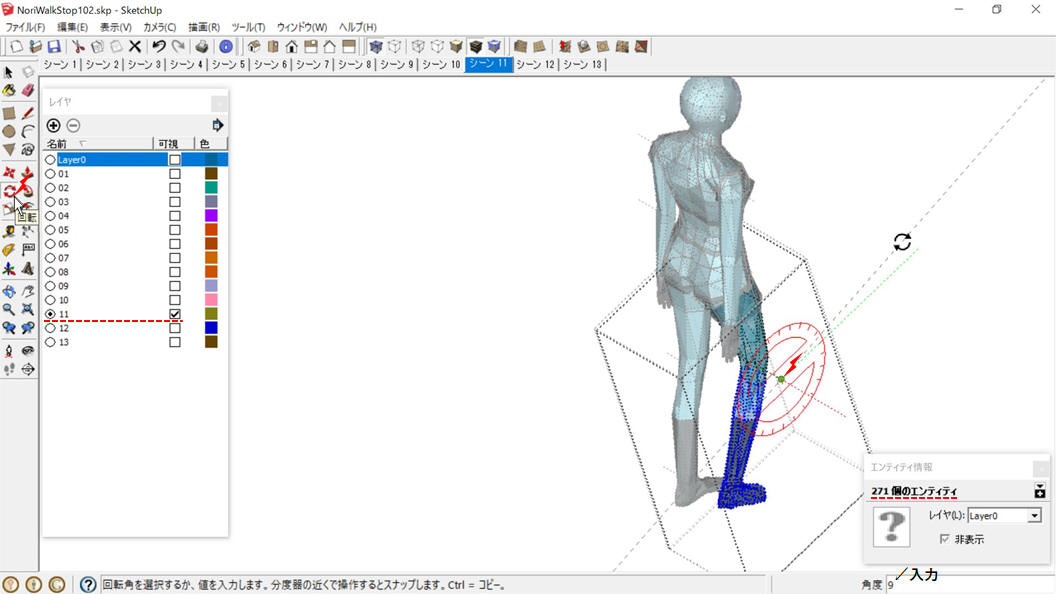
「上書き保存」
このページのサンプル動画をYouTubeにアップしています。
[戻る↑]
合志市栄のマイファブラボ SAKAEPC ものづくりサポートCAD講座 [目次へ] [←前へ][次へ→]