合志市栄のマイファブラボ SAKAEPC
ものづくりサポートCAD講座
SketchUp 8 でアニメーション作成
アクリルロボットの動き・・・道?を歩かせる
[進む↓]
| 右側面図 | 等角図 |
 |
 |
| [8003A-6Bani-migi00.zip] | [8003A-6Bani-toukaku00.zip] |
アクリルロボットを(体をゆすりながら)歩かせる
[8003A-6Bani-toukaku.zip]を開いてください。
Layer0に描かれている「動力ユニット」グループをレイヤ00に「レイヤ間移動」
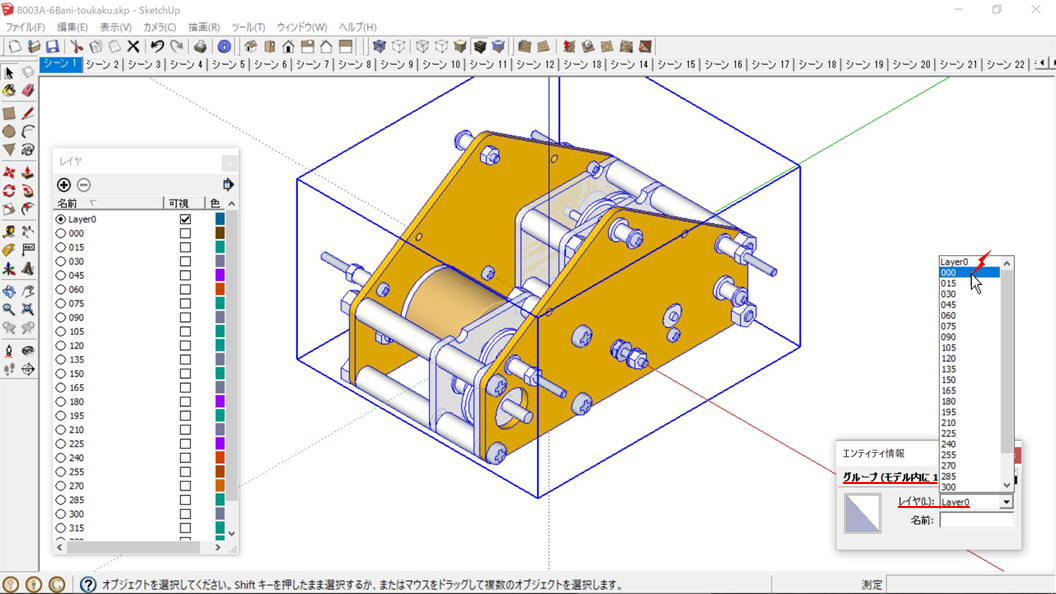
続けて全レイヤに「レイヤ間コピー」
「動力ユニット」がLayer0以外の全てのレイヤに描かれました。
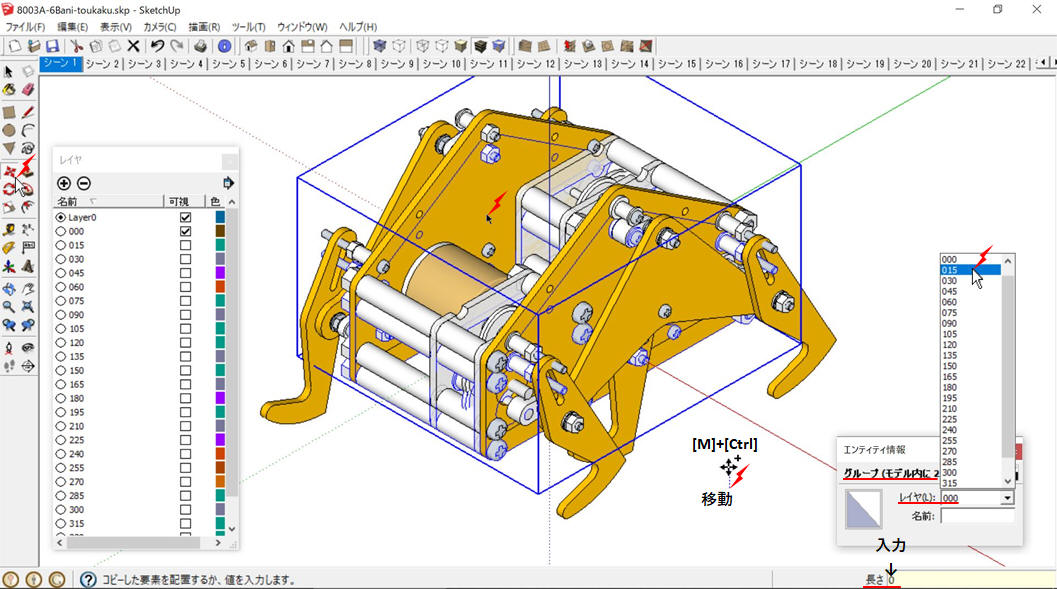
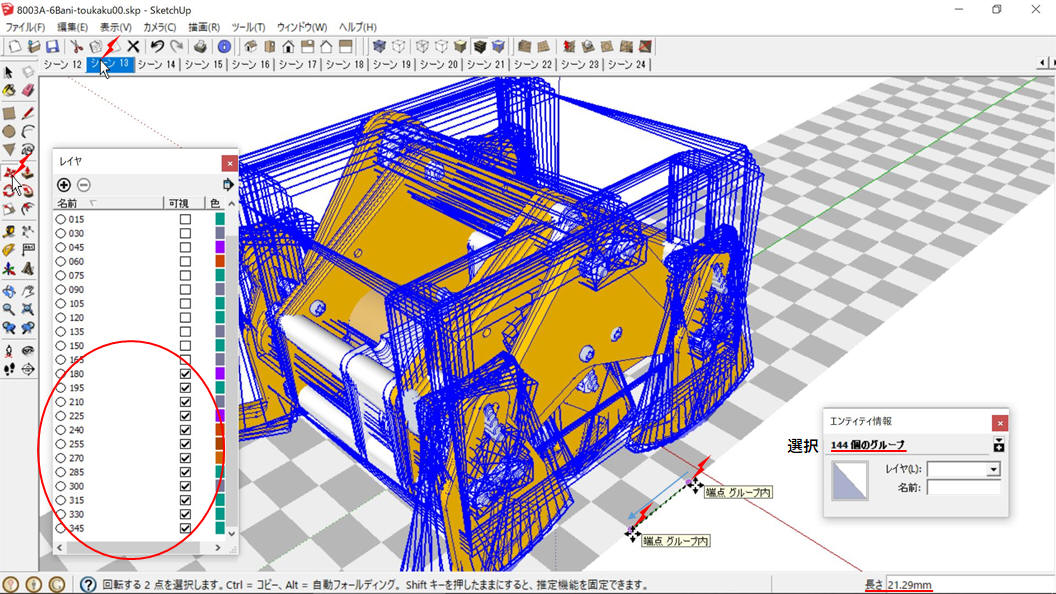
全レイヤ一括編集
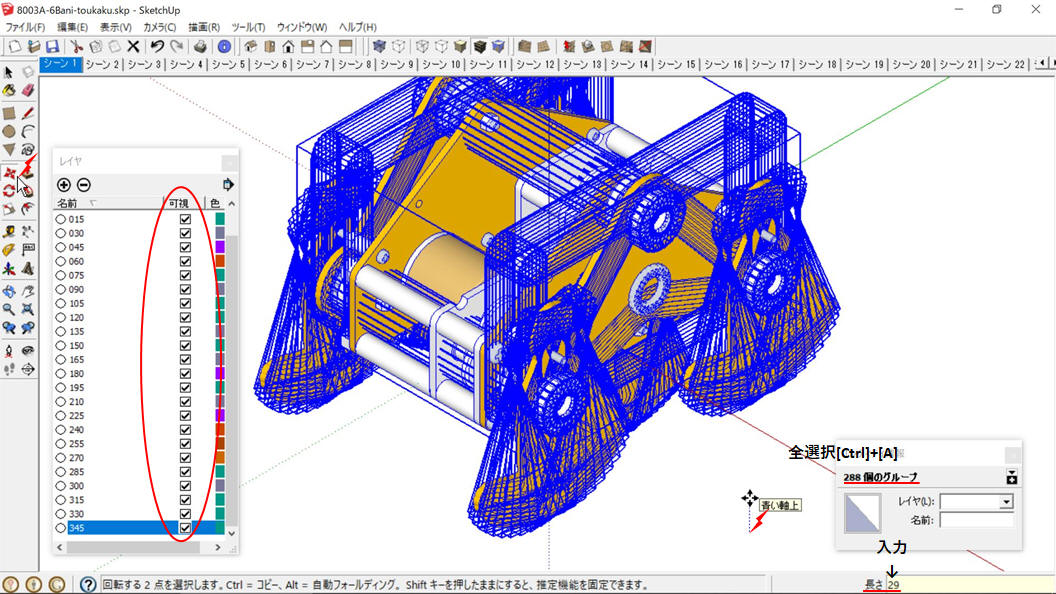
全レイヤ「可視」、全選択(288個のグループ)、全体を上に29mm(共通図面「アクリルロボット足」参照)「移動」
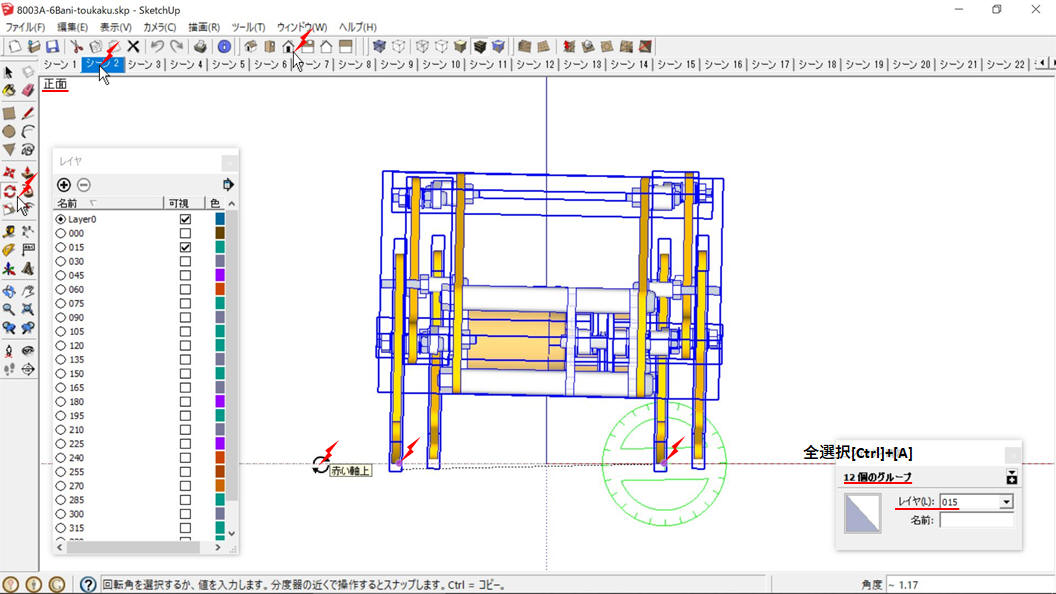
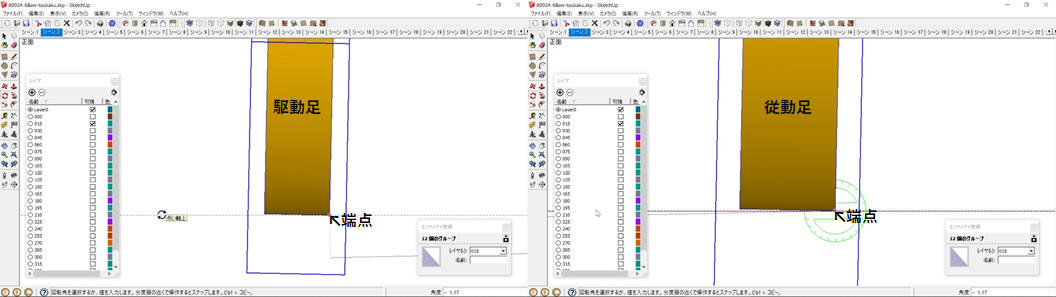
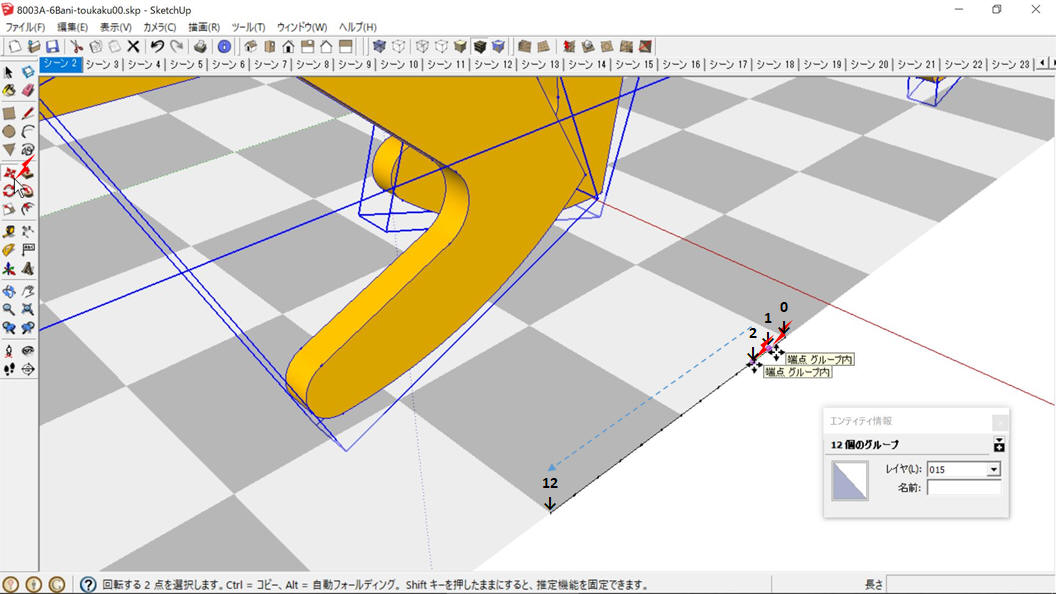
レイヤごとに、足の動きに合わせて身体を傾けます。
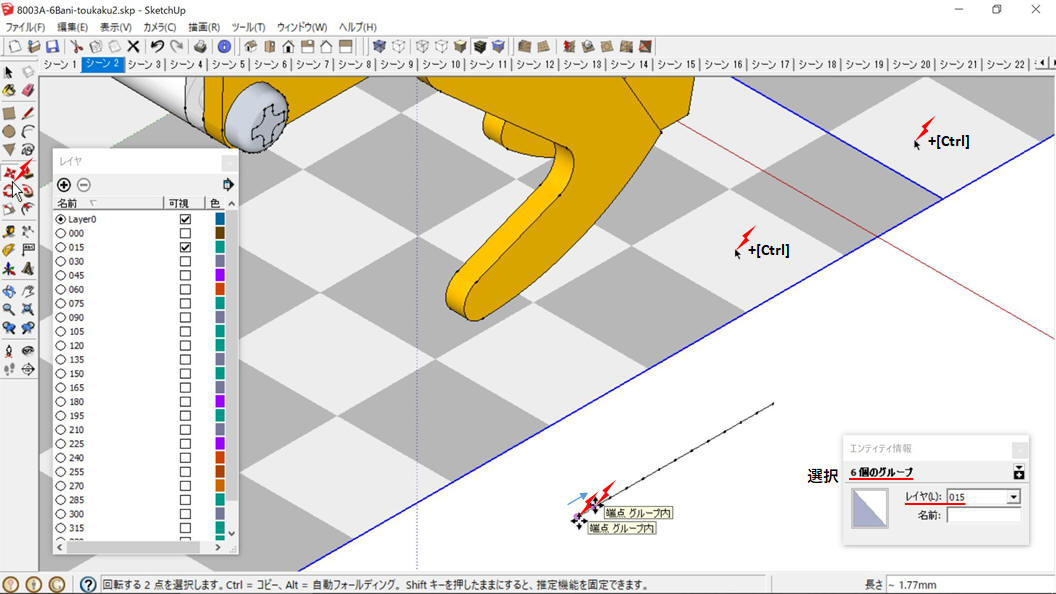
図「レイヤ015(シーン2)」の様に、従動足と駆動足の接地点(三点接地)を揃えて「回転:赤い軸上(水平)」
十分に拡大して、操作を行ってください。この手順で探る接地点(端点)は、円周上の一点(近似点)なので、結果にバラツキが生じます。
当方の環境では稀にエラーが生じ、一時フリーズしてしまいました。
サンプルファイルでは足底の一部が路面にめり込んでいますが、無視しています(=^x^;=)
比較のため「カメラ[平行投影]」で表示
 |
 |
| 変更前 | 変更後 |
路面をデザインする
アクリルロボットの歩幅(設計値)
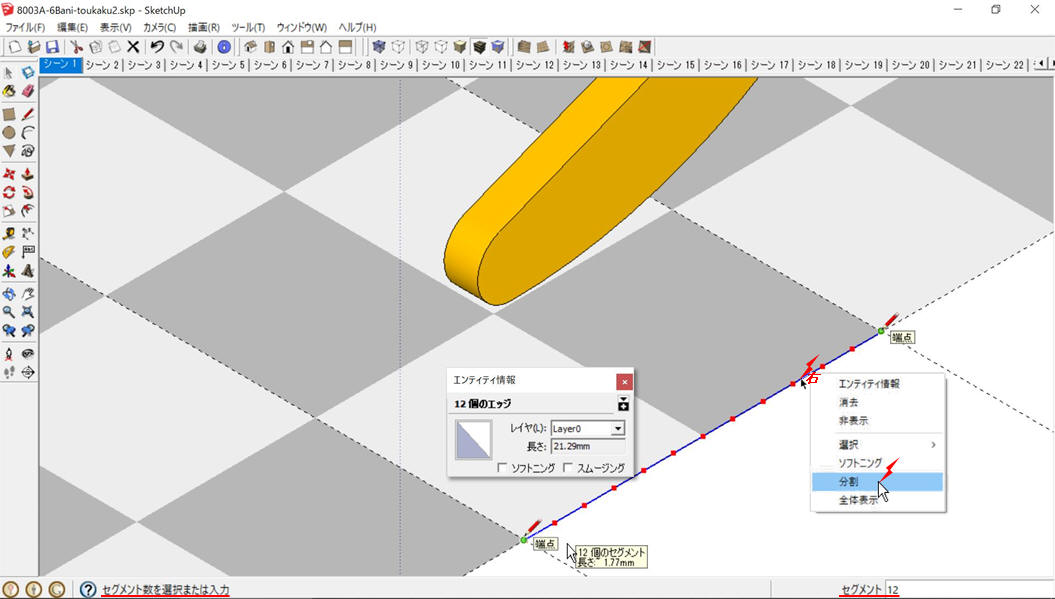
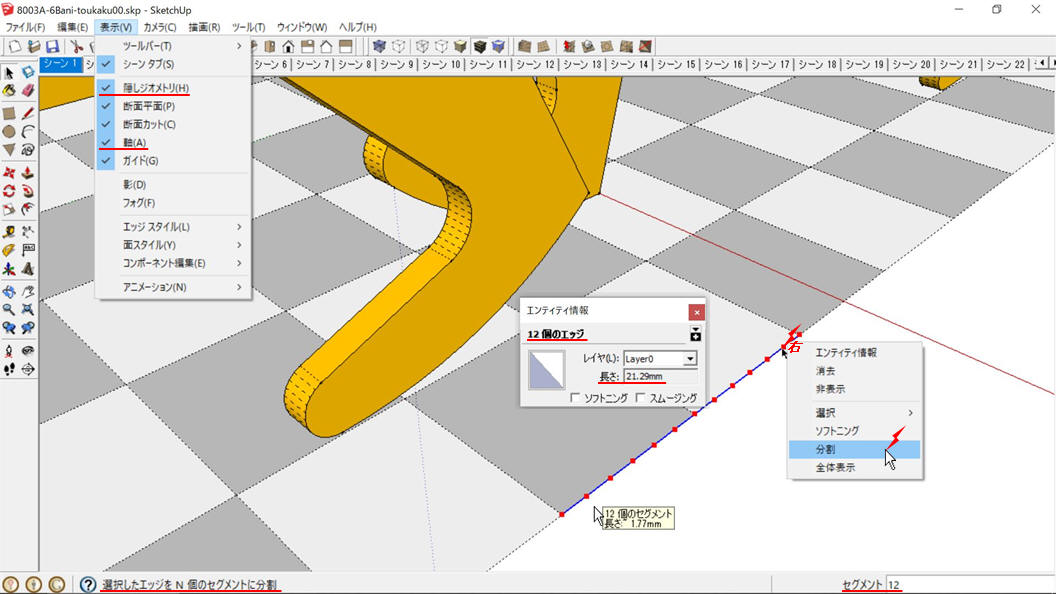
「足(アクリルロボット足)の接地範囲」の「長さ」を求めます。
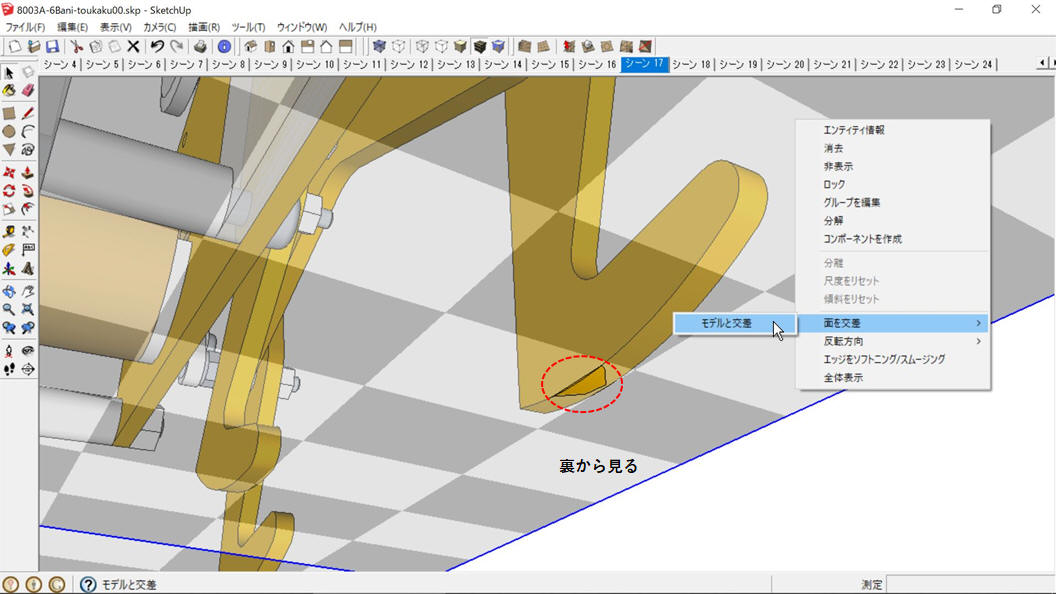
「足」選択→右クリック「グループを編集」更に右クリック「グループを編集」→足底の「接地範囲(円周)」を選択
→右クリック「曲線を分解」→「エンティティ情報(長さ)」を確認
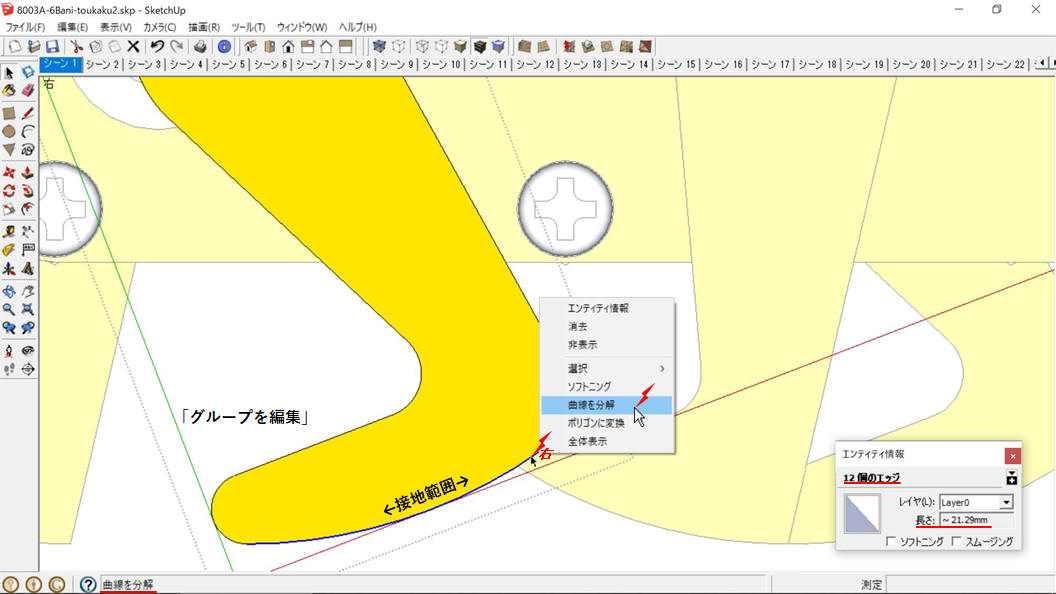
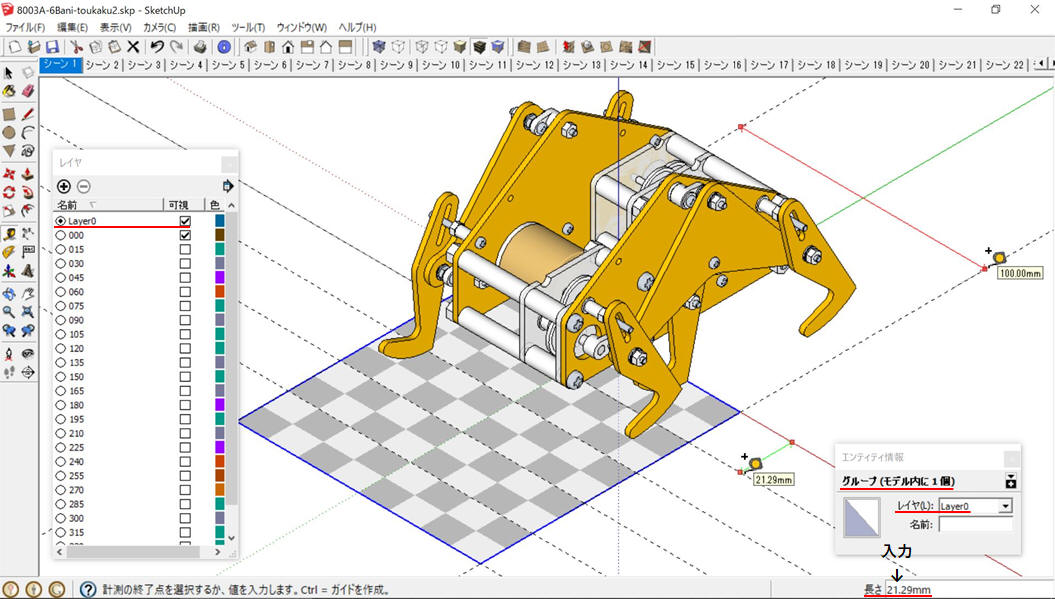
約21.29mmと表示されます。
「歩幅」を単位として寸法を決め、ここでは半透明の市松模様にして、適当なサイズでグループ化しています。
路面をループ再生します。移動の目盛りを記入しましょう。
「線」を「分割」
12コマ(シーン)を1ループにしています。
目盛りを使って「路面」のモジュール(グループ)を「移動」
図では、目盛りの位置を移して「端点」を強調しています。
「路面」をレイヤ000に「レイヤ間移動」
他の場面でシーンを変化させたときに、「路面」の端が見切れないよう、移動(コピー)」である程度伸ばしています。
図では「隠しジオメトリ」を表示
編集済みの「路面」を、レイヤ180とレイヤ015に「レイヤ間コピー」
「アクリルロボット」の歩行が1ループ24コマに対し、「路面」の移動を1ループ12コマにしています。
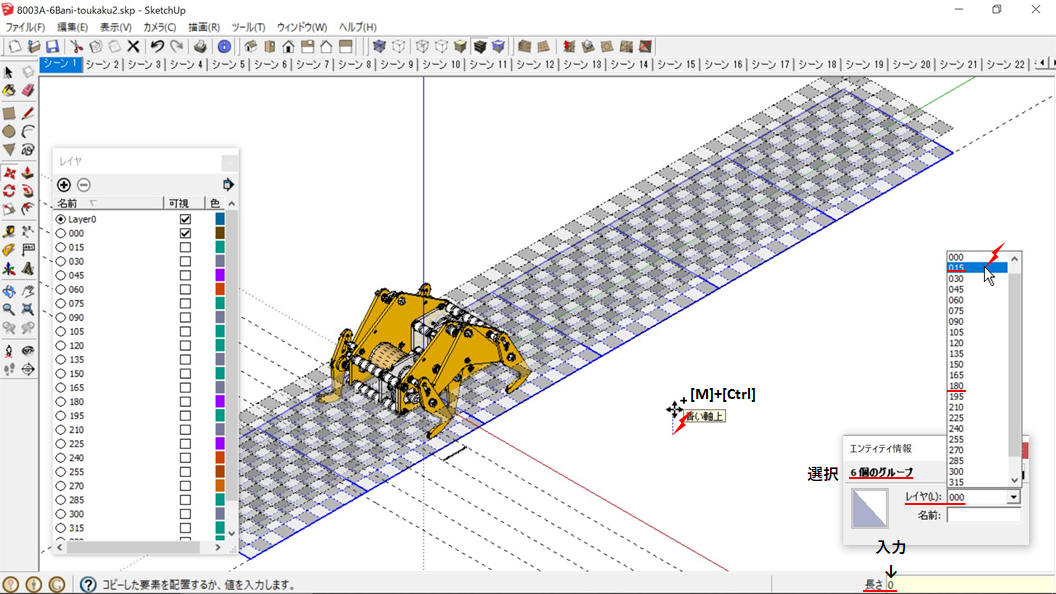
引き続き、コピー先レイヤ015の「路面」を編集します。
「路面」を一目盛り「移動」→レイヤ195とレイヤ030に「レイヤ間コピー」
同様の操作を繰り返して、「レイヤ345(シーン24)」まで完成
シーンの表示を再設定して、[8003A-6Bani-toukaku00.zip]として保存しています。
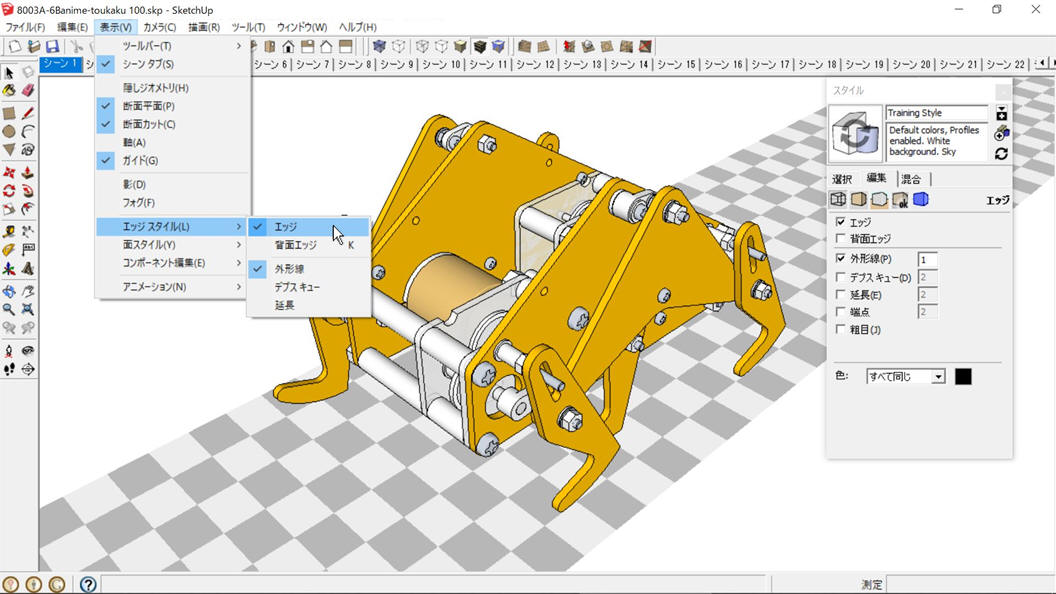
既存の「色」を再編集
裏からのぞく場面も考慮して、「路面」を半透明にしています。
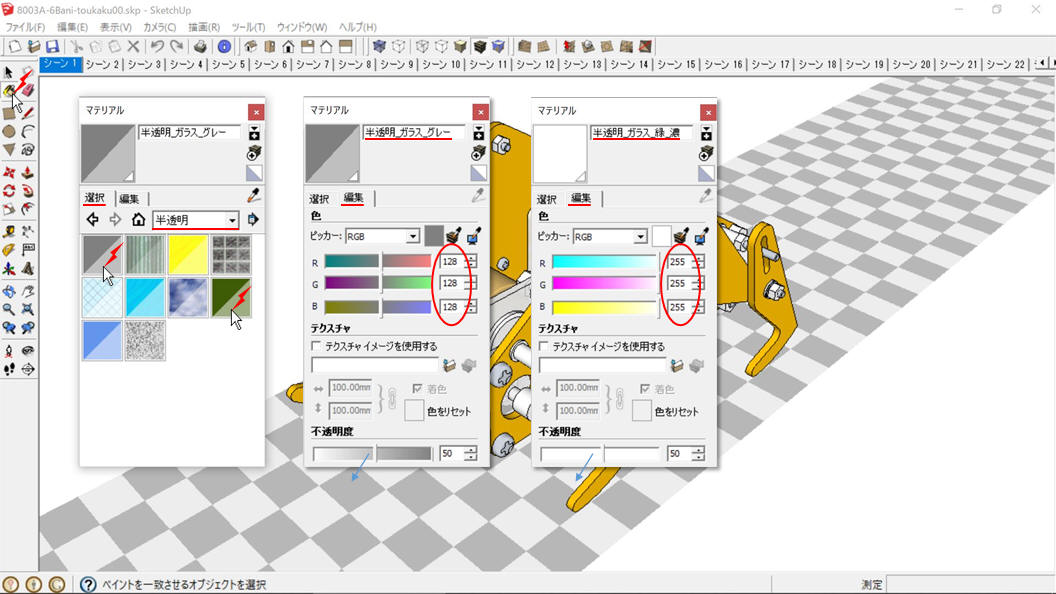
「ペイント」→ここでは「マテリアル(半透明_ガラス)」の中から「グレー」と「緑_濃」を選んでRGB値変更
アクリルロボットが通り過ぎていく?
背景(路面)を「フィックス」して、被写体(アクリルロボット)をフレーム・イン/アウトします。
 |
 |
[8003A-6Bani-toukaku00.zip]を開いてください。
レイヤ000に描かれている「路面(6個のグループ)」をLayer0に「レイヤ間移動」
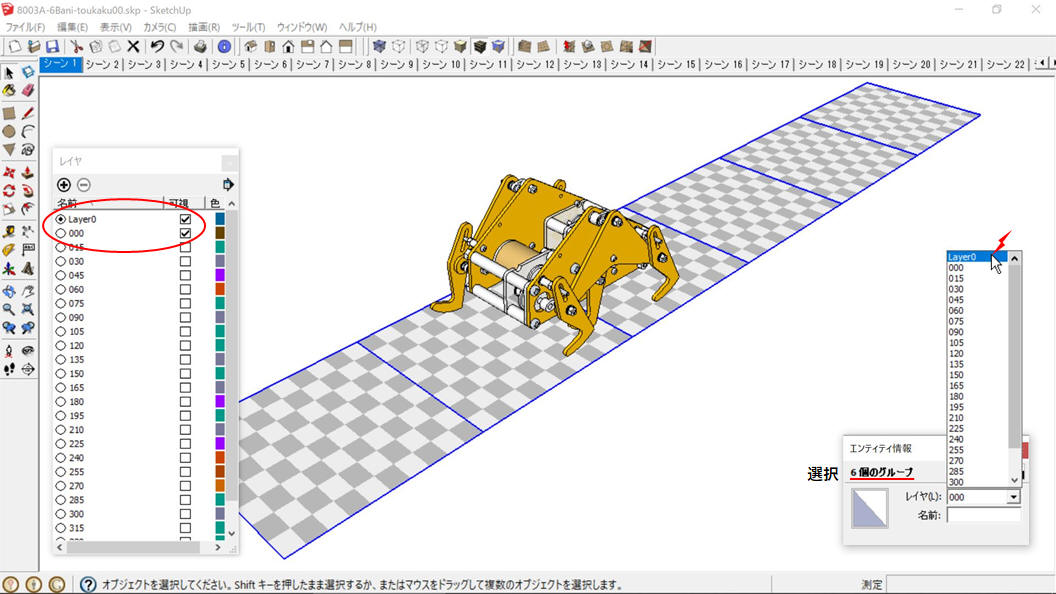
残りの「路面(138個のグループ)」を削除
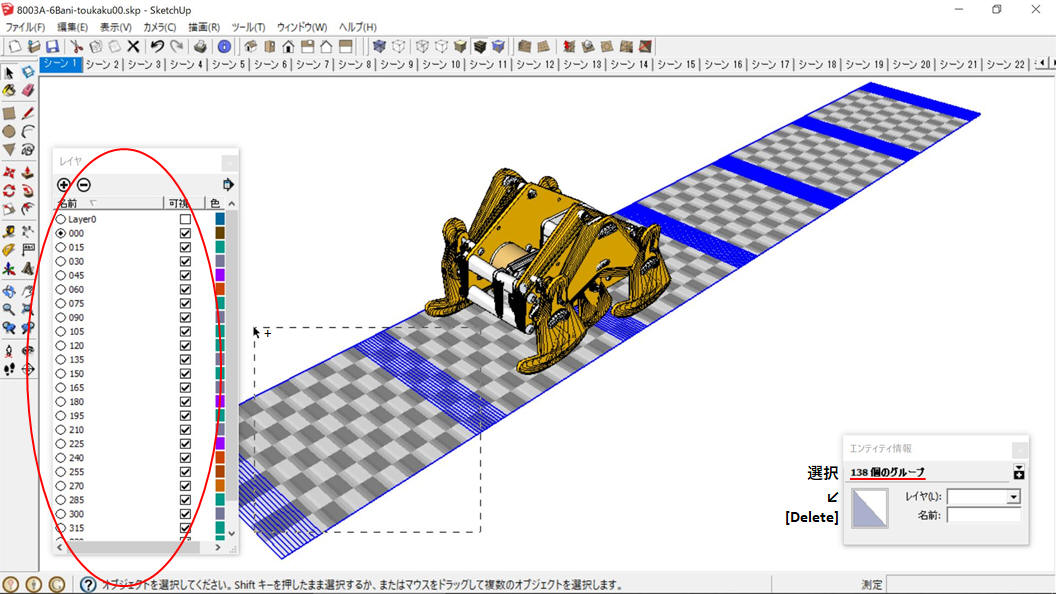
複数レイヤを一括編集しています。
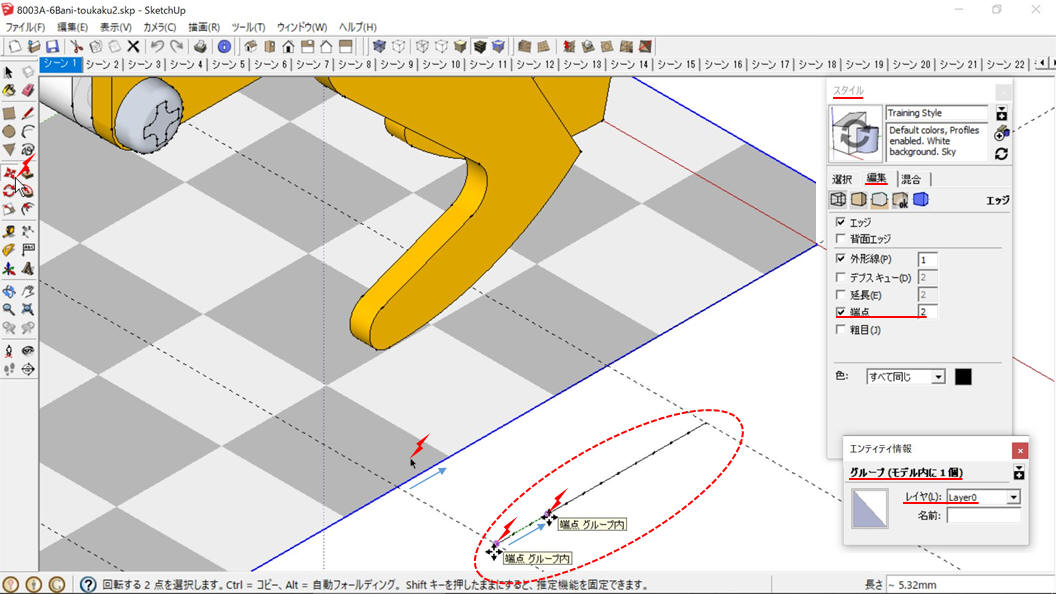
「歩幅」の長さの「線」を「12分割」して、移動の目盛り(路面ループ再生に同じ)とする
図では、端点の表示の値を2にして強調しています。
「シーン2」から作業を進めます。
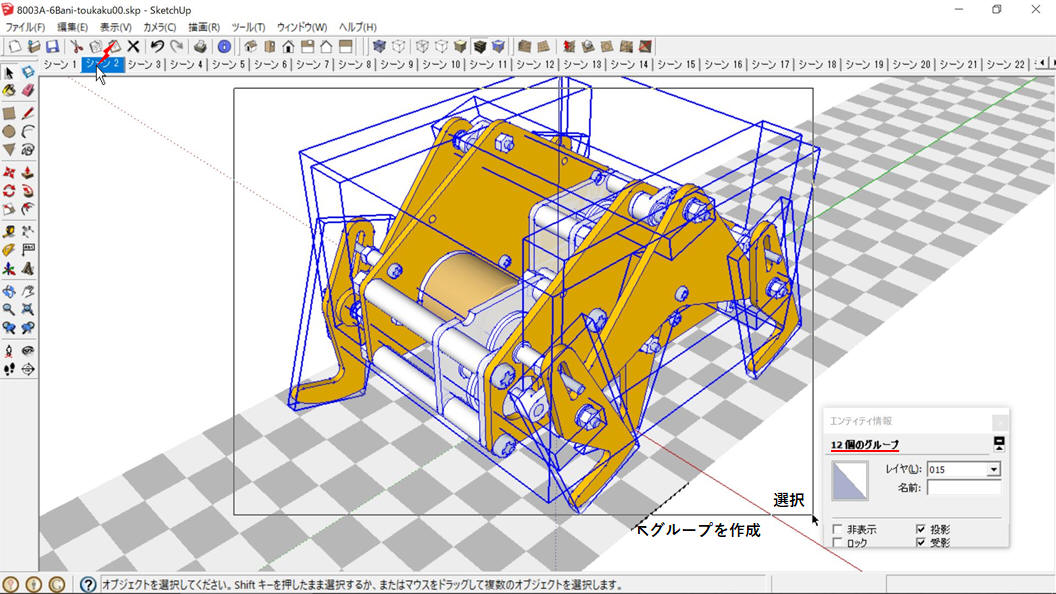
「アクリルロボット(12個のグループ)」を選択(目盛り線は範囲に含まれぬようグループ化しておく)
シーンごとに、一目盛りずつ増やして「移動(前進)」
シーン12まで描き終わりました。
レイヤ180(シーン13)~レイヤ345(シーン24)、片側の「歩幅」分「移動(前進)」
複数レイヤを一括編集しています。
続けて「シーン14」から作業を進めます。
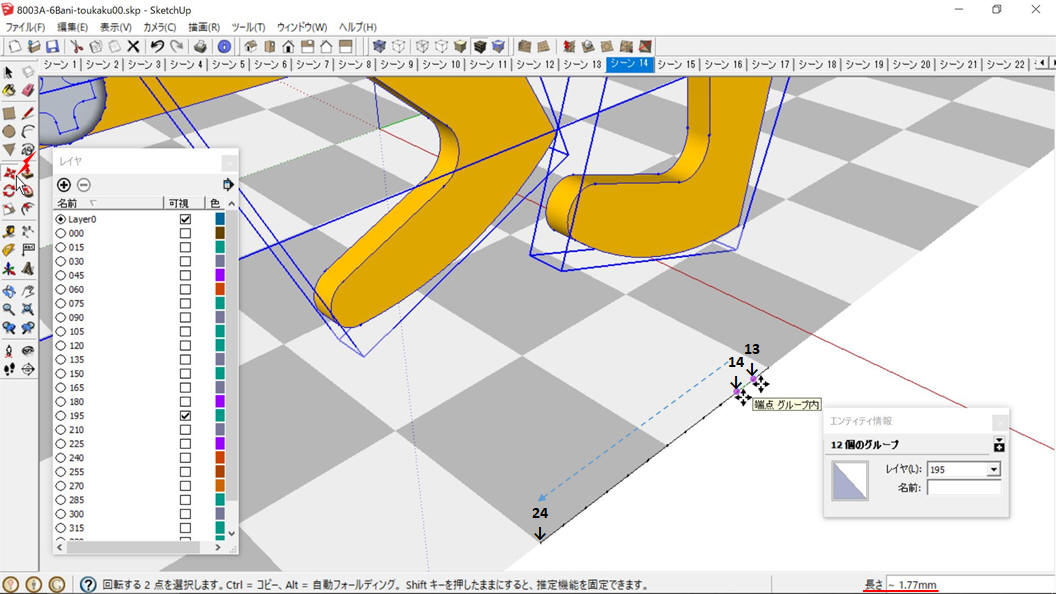
シーンごとに、一目盛りずつ増やして「移動(前進)」
シーンの表示を再設定し、全24シーンで一歩(片側の「歩幅」の倍)進む元ファイル[8003A-6Banime-toukaku100.zip]として保存しています。
引き続き元ファイルから、一歩ずつ前後に進める複数のファイルを作成しましょう。
全レイヤ「可視」、アクリルロボット(288個のグループ)選択→一括編集「移動(前進)」
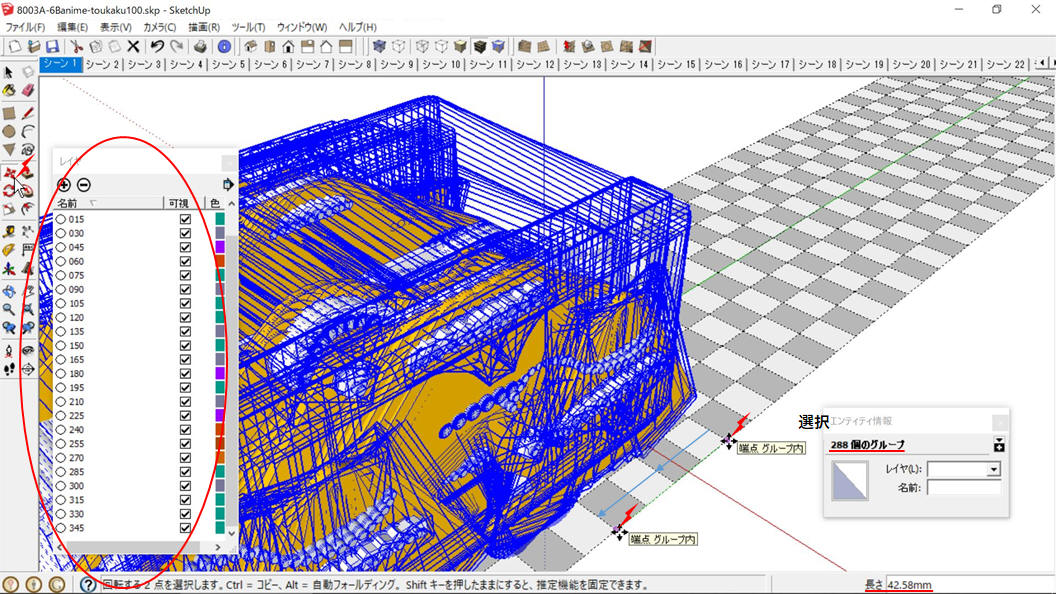
「隠しジオメトリ」を表示して路面の端点をクリック、または数値(42.58)入力
ファイル名「***100.skp」を基準に、一歩ごとに前(101、102、…)後(099、098、…)と連番で名前を付けています。
サンプル(フレーム・イン/アウト)のGIF動画(通過)では、13ファイル「***092~104.skp」、290コマ使用
アクリルロボットの行列!
元ファイル[8003A-6Banime-toukaku100.zip]を編集します。
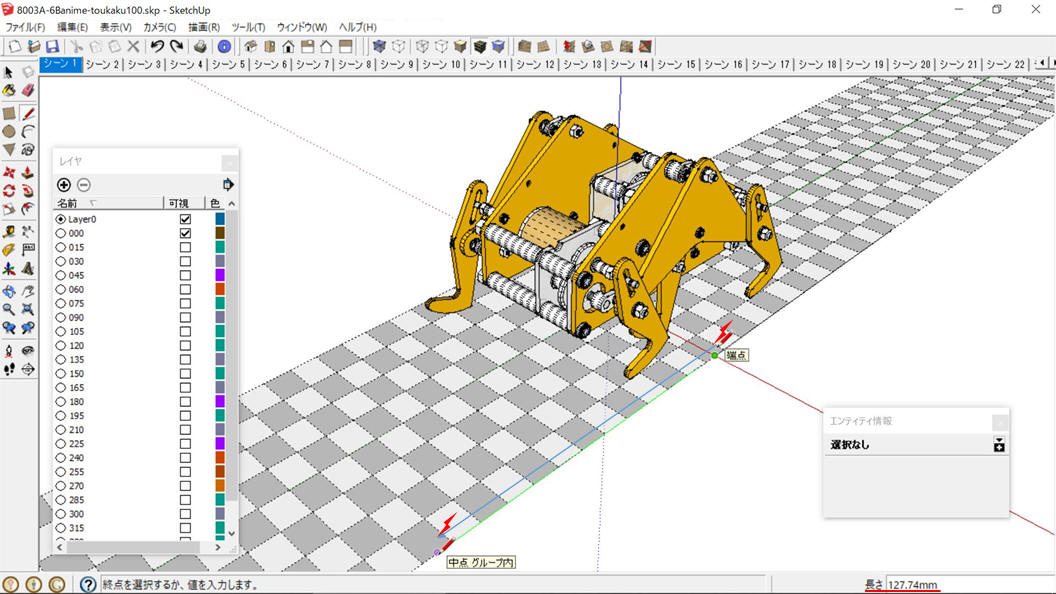
ロボットを前後にコピーする位置を示す「線」を引く
図では隠しジオメトリを表示して、敷石の幅を単位としています。
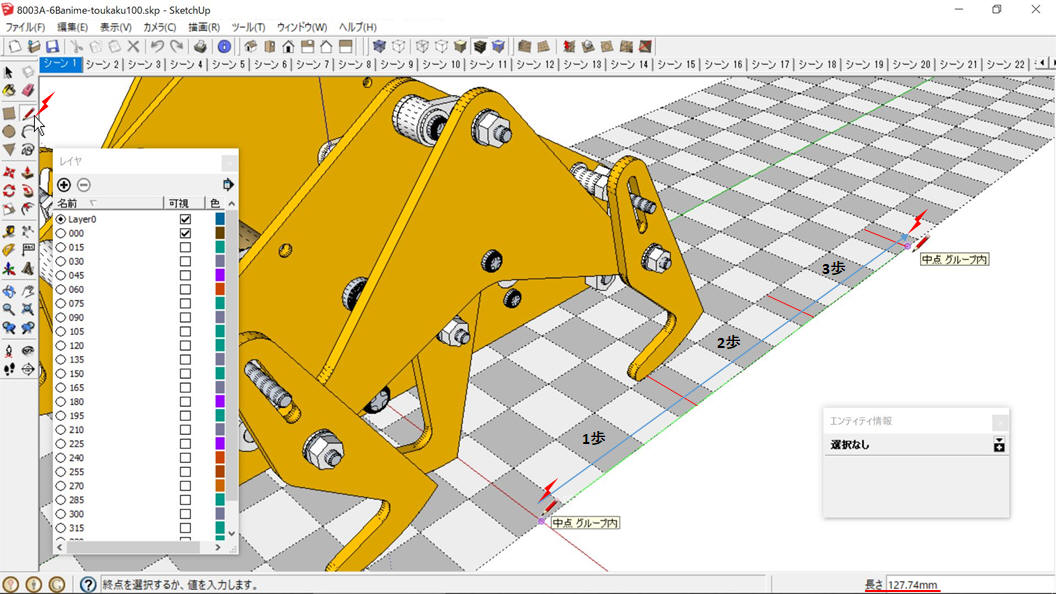
敷石を数えて3歩分(図では中点をクリック)、または数値(127.74)入力
後方と前方に分けて引いています。
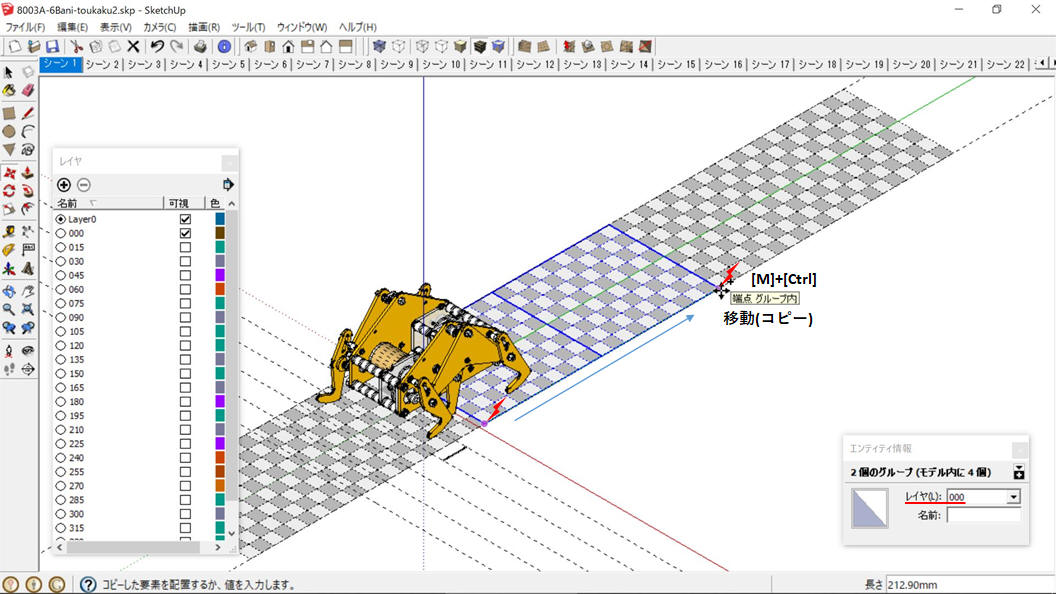
全てのレイヤで、補助線を使ってロボットを前方にコピー
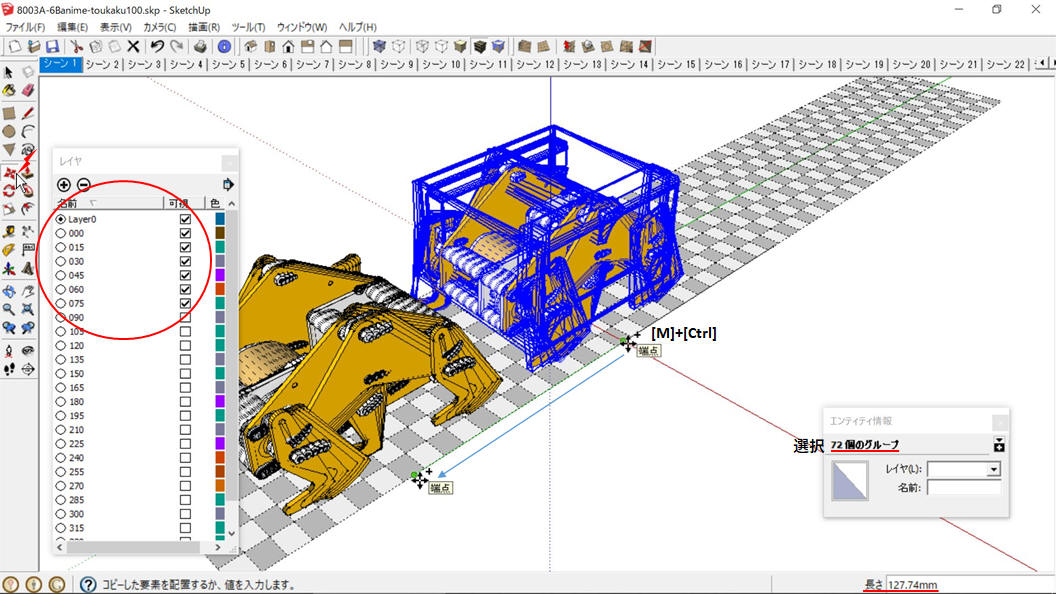
複数レイヤを一括編集しますが、マシンの負担を軽減するため分割して(ここでは4分の1ずつ)行っています。
続けて+[Ctrl]で後方2ヶ所にコピーします。
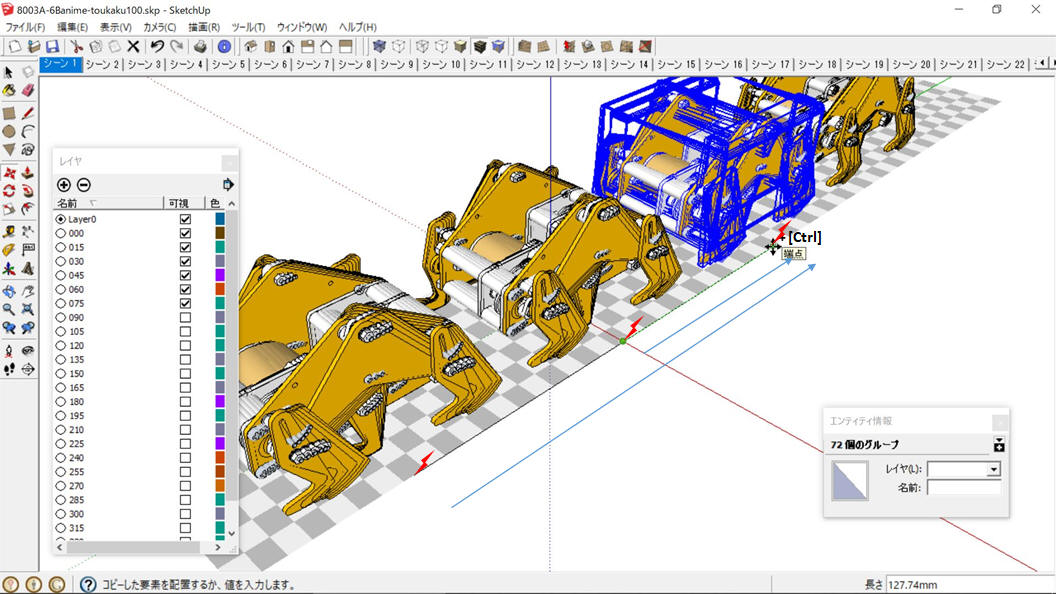
再生のループがつながるよう、3歩ずつの等間隔で配置しています。
同様の手順で複数のファイルを作成し、「***2100.skp」を基準に、連番で名前を付けています。
サンプル(フレーム・イン/アウト)のGIF動画(行列)では、1ループ表示に3ファイル「***2098~2100.skp」、72コマ使用
[戻る↑]
合志市栄のマイファブラボ SAKAEPC ものづくりサポートCAD講座 [目次へ] [←前へ][次へ→]