合志市栄のマイファブラボ SAKAEPC
ものづくりサポートCAD講座
駆動模型の設計
動きを検証・・・複数のレイヤを使ってアニメーション作成 2
[進む↓]
| 六足歩行アクリルロボット3号Bタイプ 右側面図(足の動き) |
等角図(全体表示) |
 |
 |
| [6s3_Bani-migi.skp] | [6s3_Bani-toukaku.zip] |
補助線(マーカー)を2D_CADで描き、3DS出力
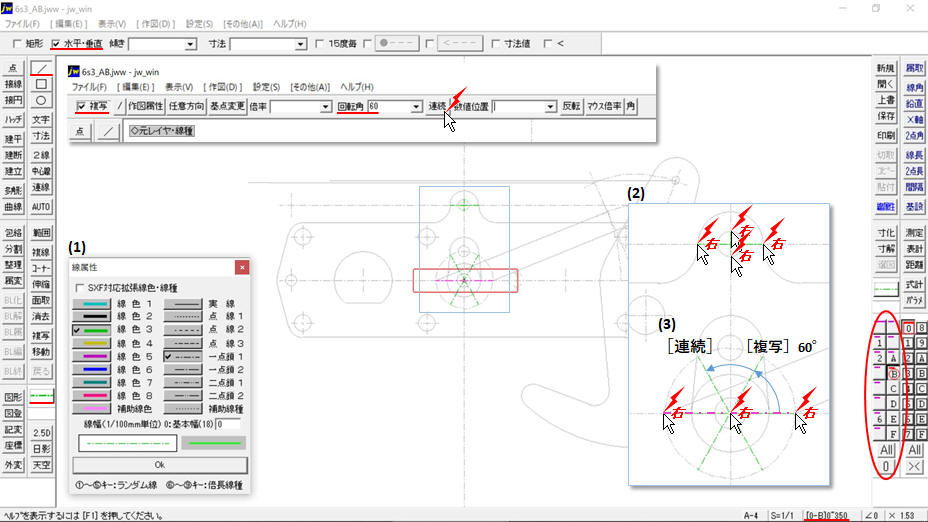
補助線が混まぬよう、クランクの一周を三等分したグループを12描きます。Aタイプでも使用したファイル「6s3_AB.jww」を開いてください。
■ 線、■ 複写
「[0-B](「0~350」と名前を付けています)」を「書き込みレイヤ」にし、他の「レイヤの状態」を「レイヤバー」から図のようにします。
(1)「線属性[線色3][一点鎖1]」
(2)「線[水平・垂直]→スライド機構の「支点」と「クランク(0°-180°)」の中心線を描く
(3)「複写[回転角60][連続]」→「クランク(60°-240°),(120°-300°)」の中心線を描く
■ 円弧
ここでは識別しやすいよう、線色を変えています。
(1)「線属性[線色4][一点鎖1]」
(2)足のピン穴(駆動リンクロッド側)の軌跡を「レイヤ[0-A]」よりトレース
(3)「クランク(0°-180°)」より、「駆動リンクロッド」を半径とする「円弧」
水色の数字は、手前の「クランク」の回転角を示しています。
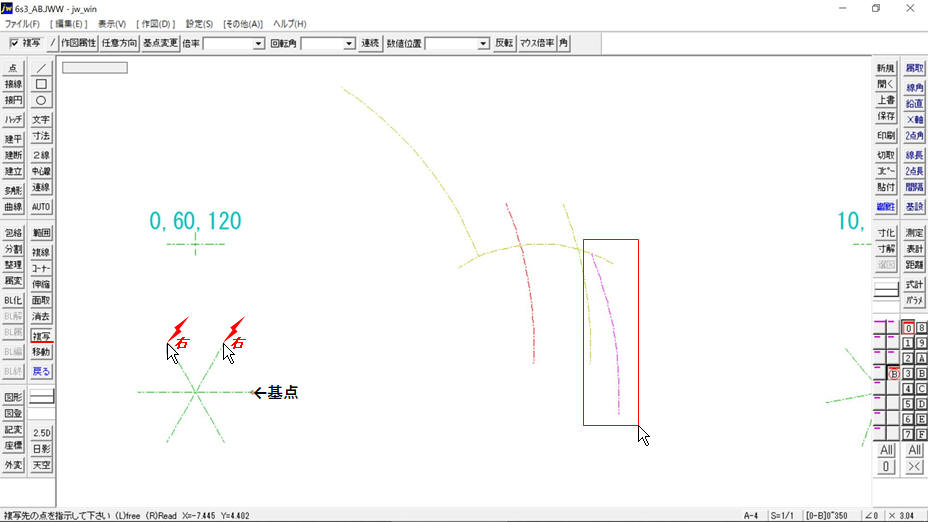
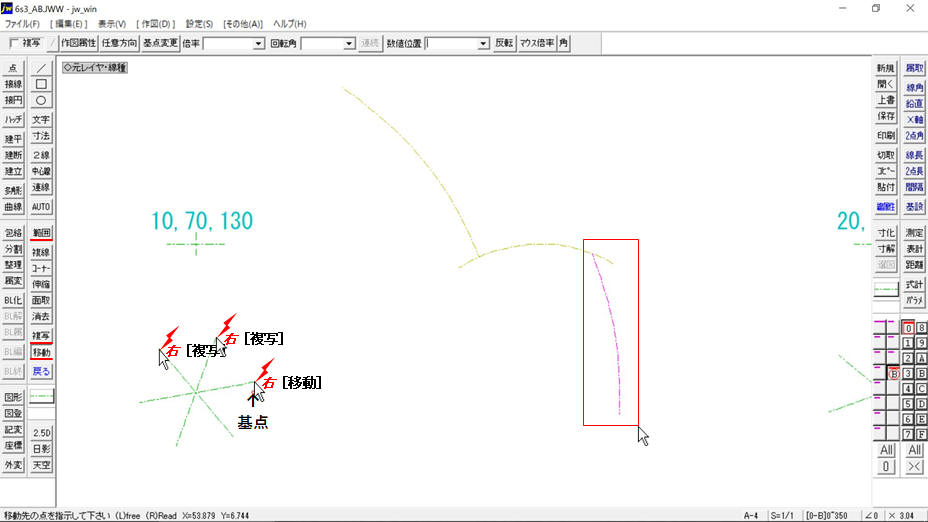
■ 複写
[範囲]→[全選択]→[基準点変更](R)Read
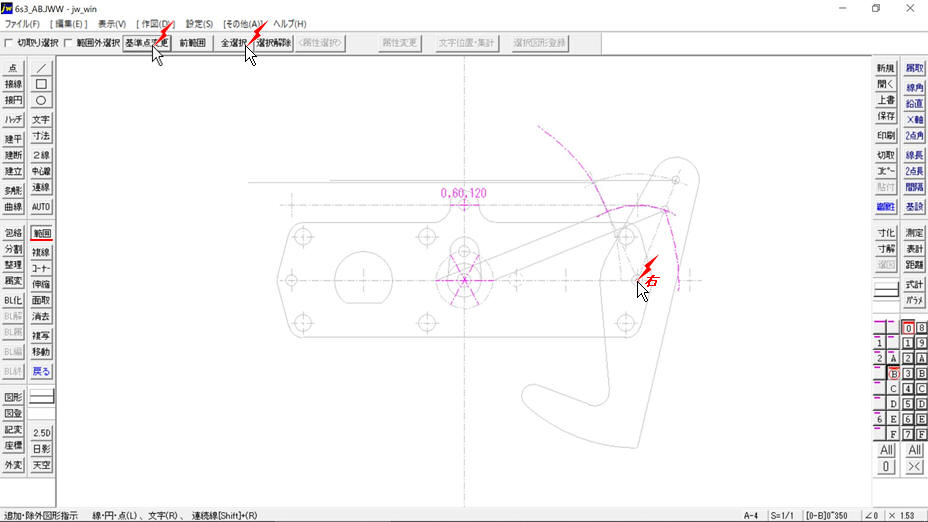
[複写](R)Read→[連続]4回
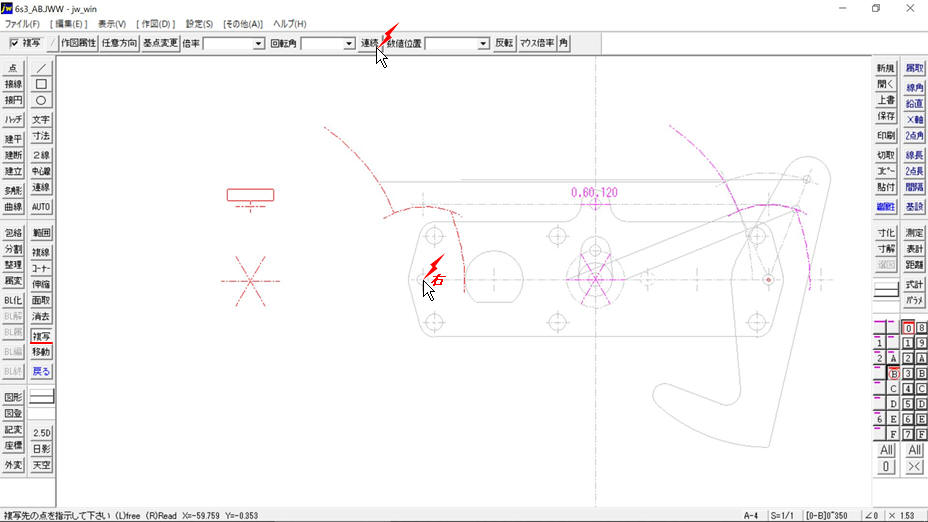
[文字]数字を10づつ増やす、[移動]回転角を10°づつ増やす
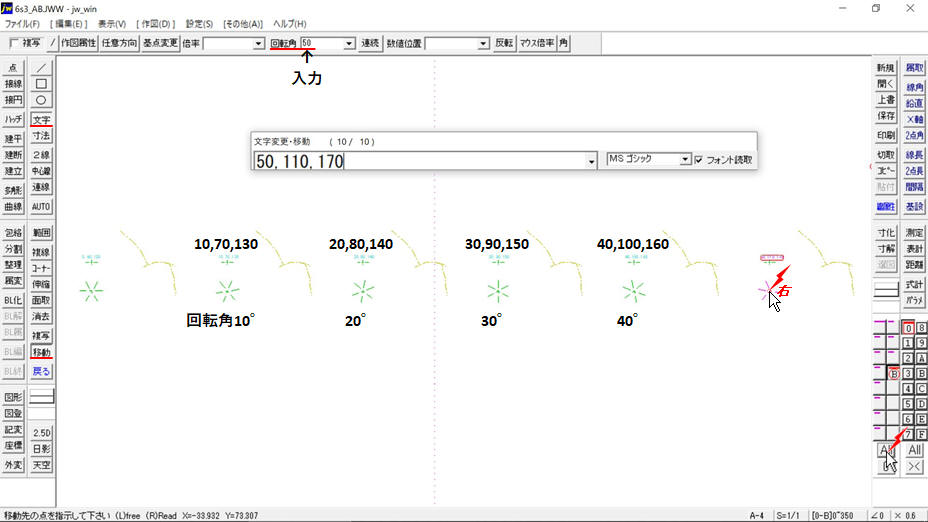
「書込みレイヤ」のみ表示しています。
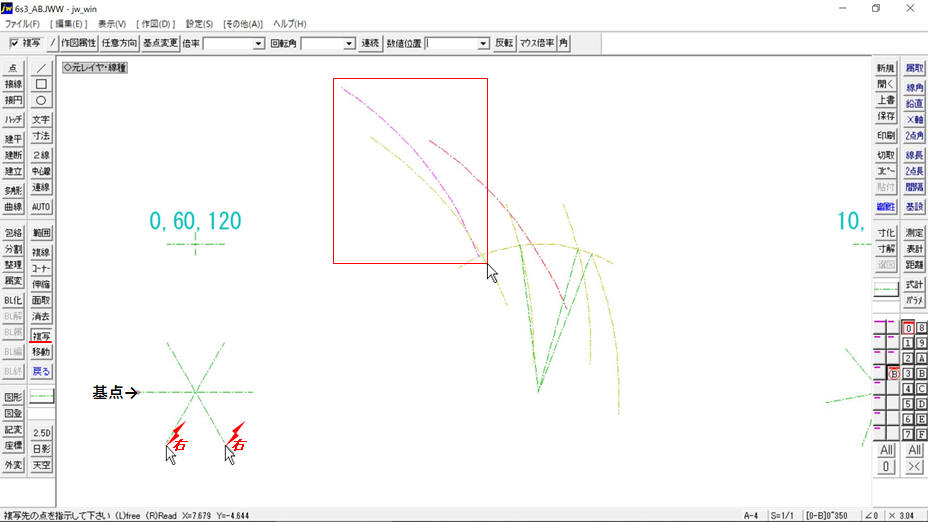
[複写]→[全選択]→[選択確定]→「数値位置[0 , 60]」入力
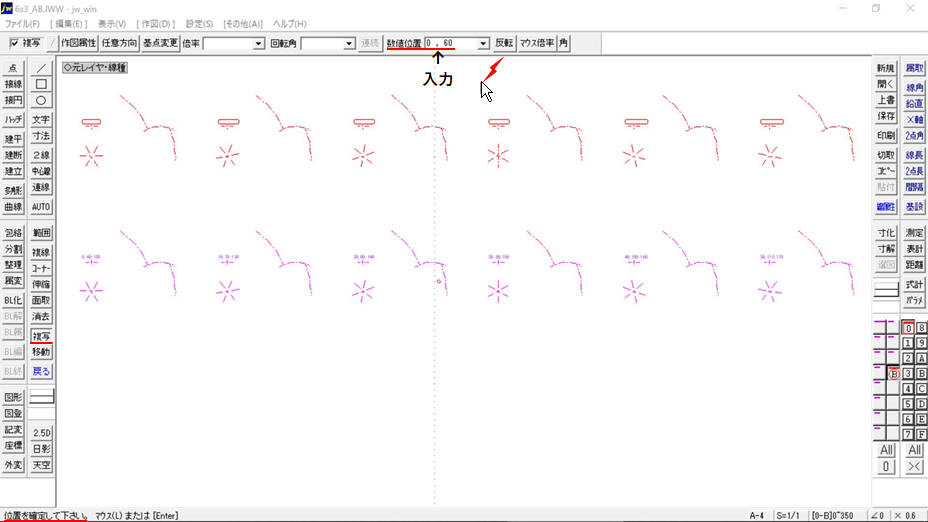
[文字]コピー元(下段)の数値を下表に合わせて変更

[範囲]円弧(基点0°)を選択、[複写]60°_120°に複写
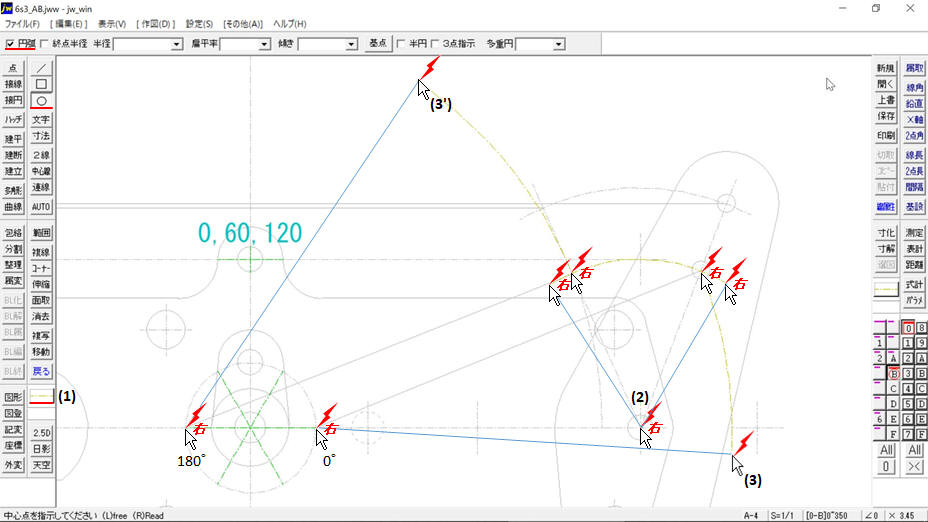
「線属性[線色3][一点鎖1]」
「足(手前側)」の回転角(クランクの回転角に対応)を示す線を描く
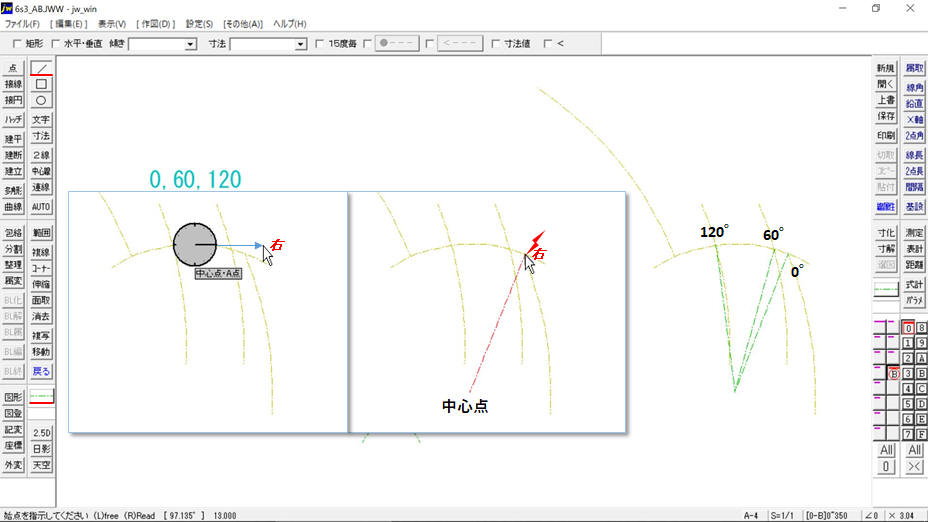
ここでは「クロックメニュー」を使って円弧の中心点を求め、[線]の最初の「始点」としています。
[範囲]円弧(基点0°+180°)を選択、[複写]60°+180°_120°+180°に複写
「足(奥側)」の回転角(クランクの回転角に対応)を示す線(寸法18.5)を描く
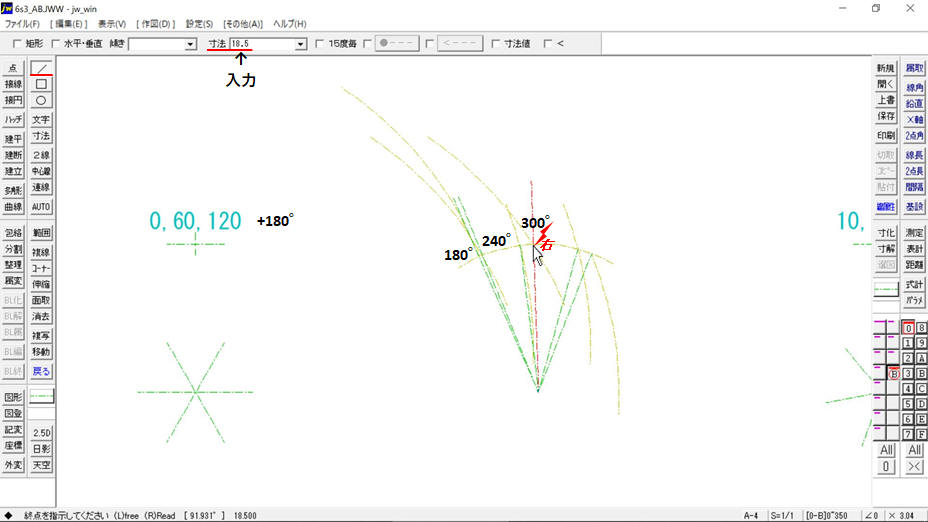
二番目のグループからは、元になる円弧(0°,180°)を対応するクランク(対応角度)に[移動]して作業を進めます。
クランクの回転(10°毎)に対応した、「従動足」の回転角を示す補助線(マーカー)が、12のグループに分けて描かれました。
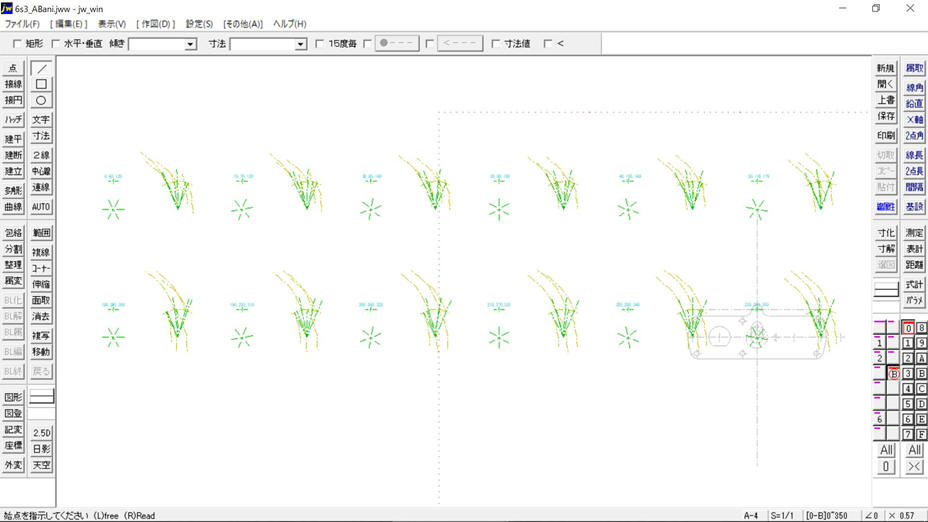
Aタイプも含め、アニメーション作成用として、「6s3_ABani.jww」と名前を付けて保存しています。
3DSデータの出力
「範囲」[全選択]→[<属性選択>]から「線色4」を除外→[コピー]
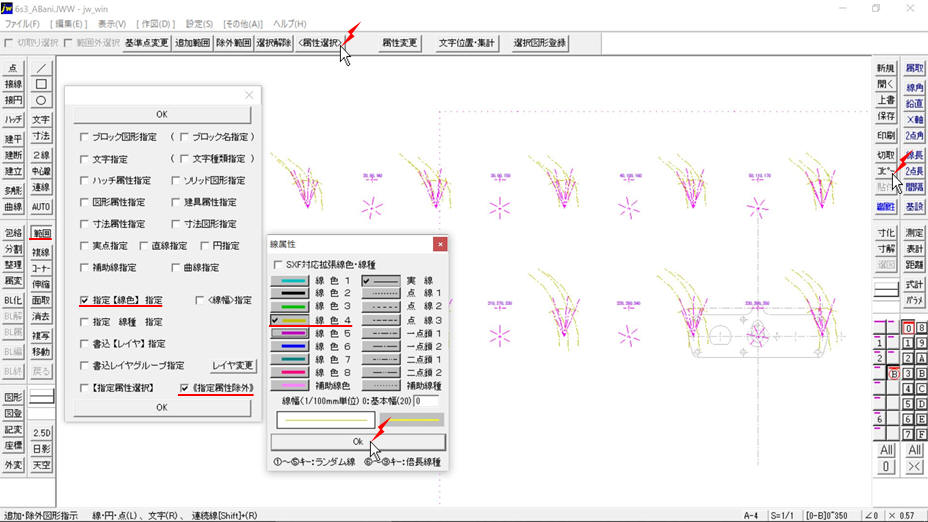
「新規作成」→「貼り付け」
dxfファイルとして保存し、3DSデータを同時出力しましょう。
3DSデータのインポート
SketchUp 8 を起動→保存した3DSファイルを「インポート」(文字はインポートされない)
分解・縮尺変更を行い、図のように配置します。
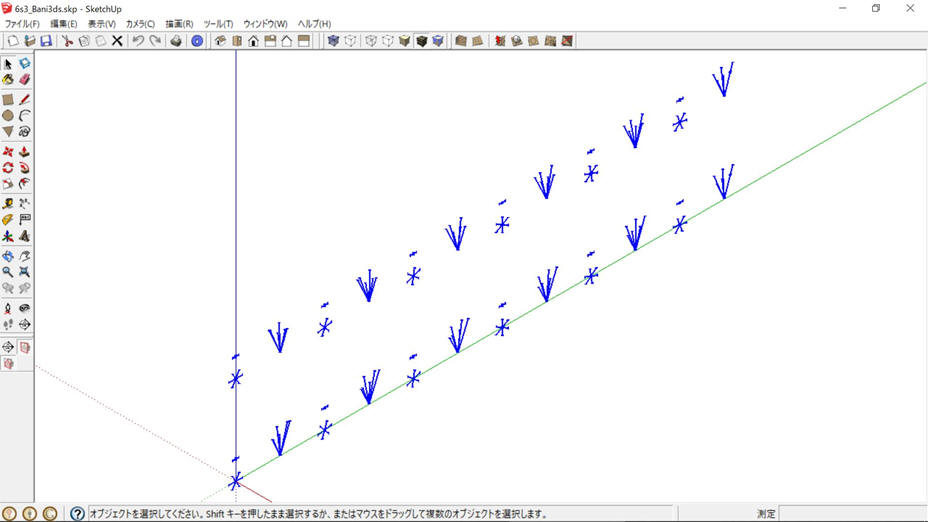
「6s3_Bani3ds.skp」と名前を付けて保存しています。
Bタイプ検討用組立図「6s3_B.zip(圧縮ファイル)」を開いてください。
「ロッドエンド」と「足のピン穴」のセンターを合わせるための、マーカーを描きます。
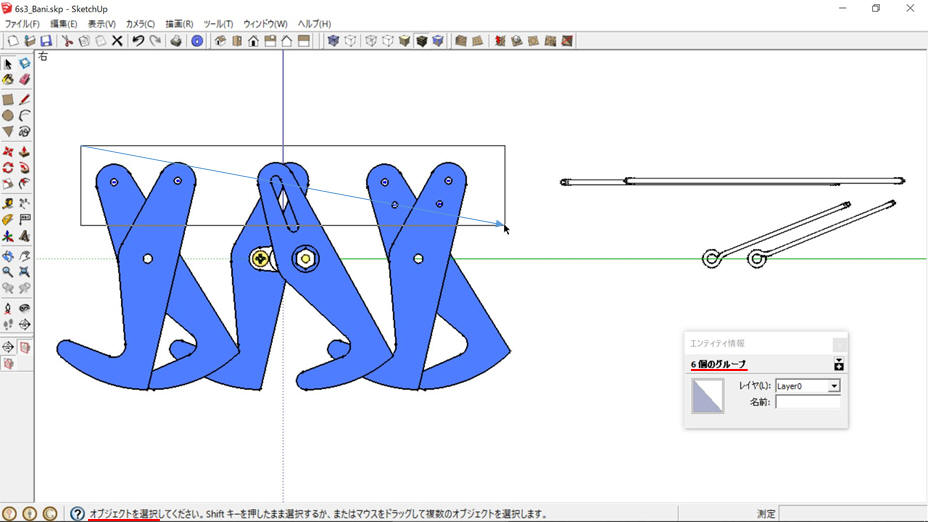
胴体(動力ユニット)部を非表示にする
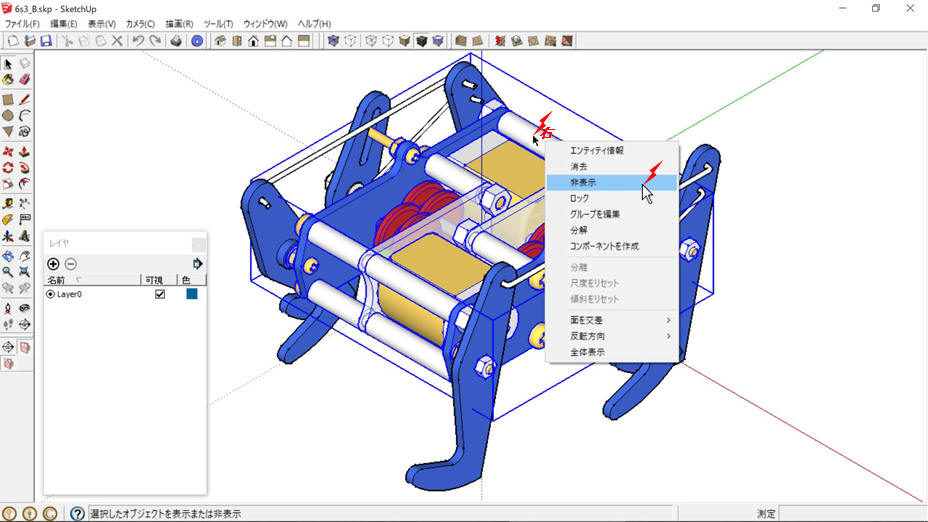
「6s3_Bani.skp」と名前を付けて保存し、作業を進めています。
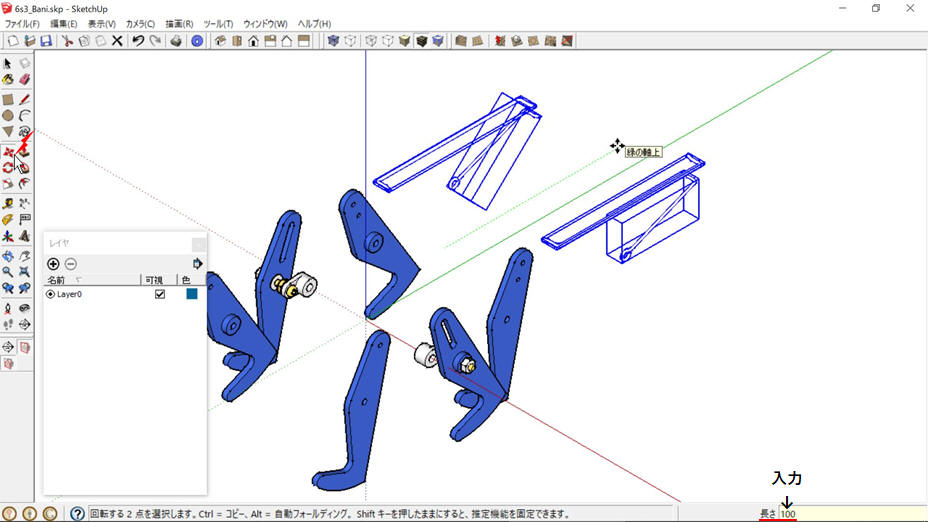
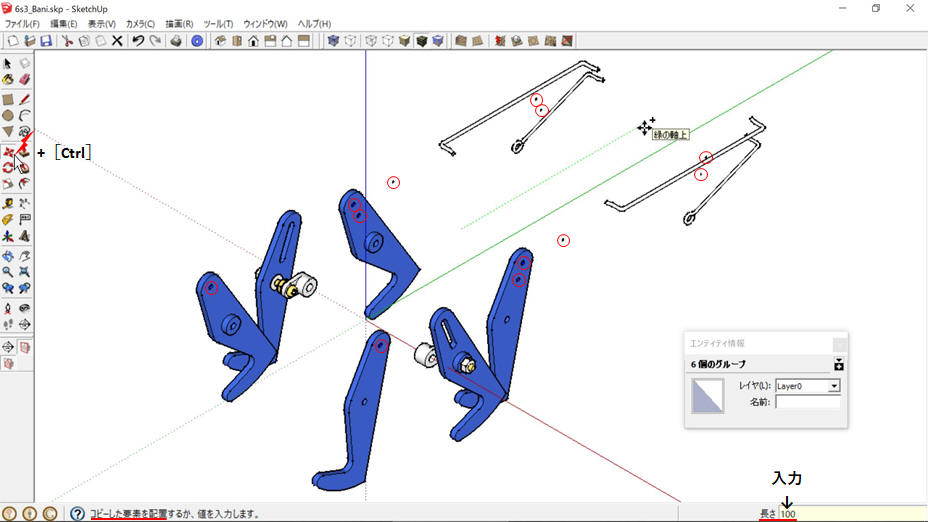
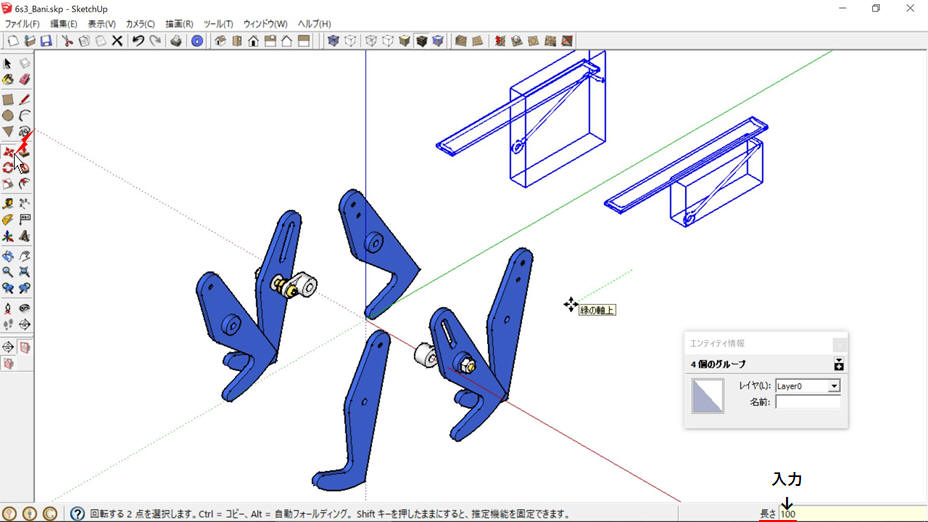
「リンクロッド(4ヶ)」選択→[移動]図では「緑の軸上」に100
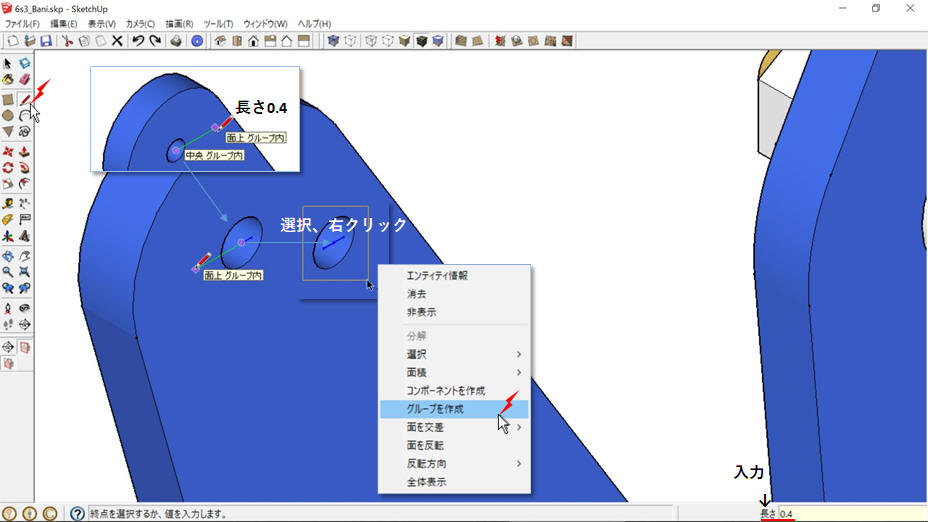
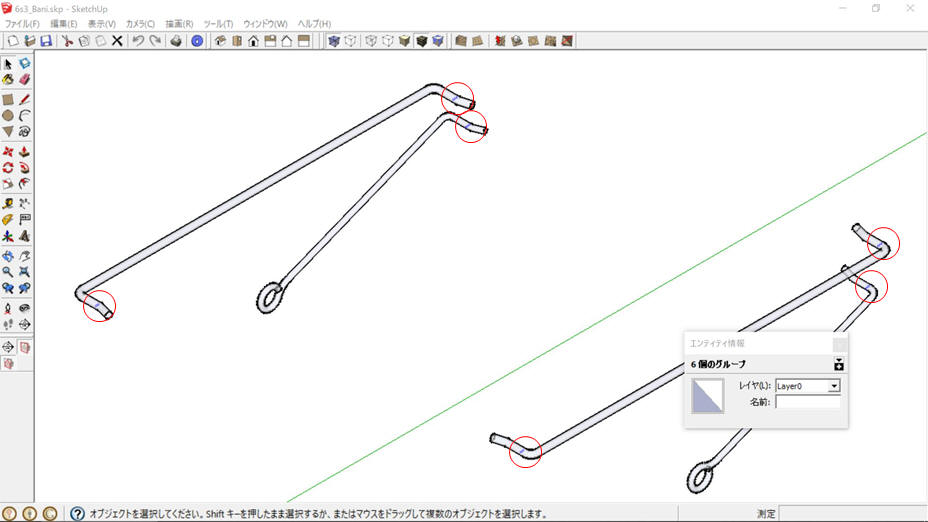
「足のピン穴」のセンターに[線]でマークします。
「中央」から「緑の軸上(左右)」方向に0.4づつ(センターに「端点」を持つ0.8mmの線)を描く→グループ化
ピン穴全て(6ヶ所)に配置します。
マーカーを選択
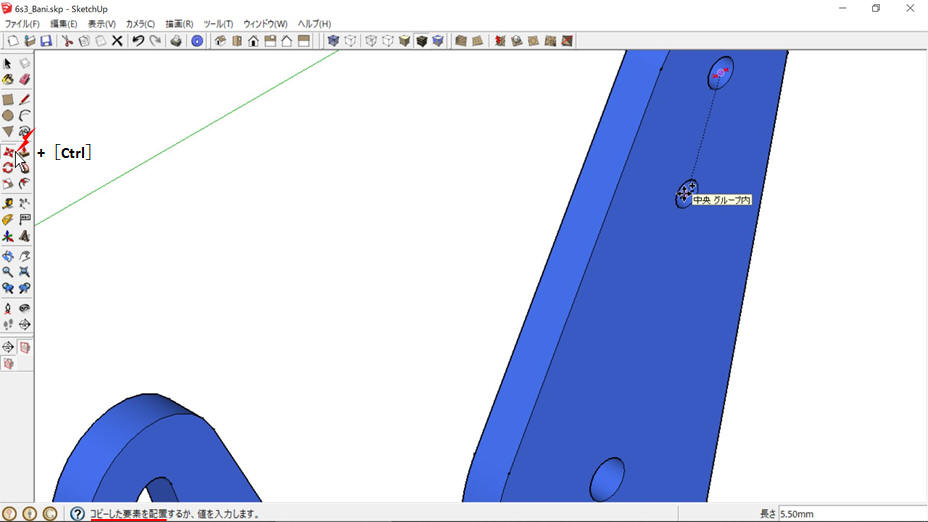
「ロッドエンド」に配置
「リンクロッド」を逃がした位置にコピーしています。
「ロッドエンド」のセンターにも「マーカー」が配置されました。
「マーカー」を含めて、それぞれ「グループ化」します。
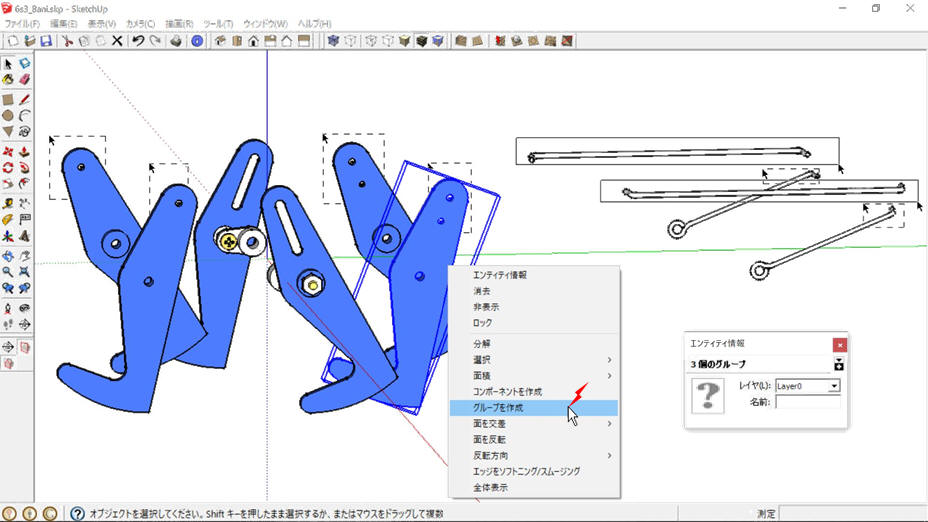
図では「範囲選択」と「交差選択」を使い分けています。
「リンクロッド」を元の位置に戻します。
レイヤの操作及び編集
前ページ「Aタイプ」と同様の手順で進めます。
■ レイヤを追加
[ウインドウ]→[レイヤ]→[レイヤを追加]
■ レイヤ名変更
「名前」を角度を示す番号000に変更
■ レイヤ間移動
選択([Ctrl]+[A]:全選択)、対象の上で右クリック→[エンティティ情報]→「名前」から移動先のレイヤ「000」をクリック
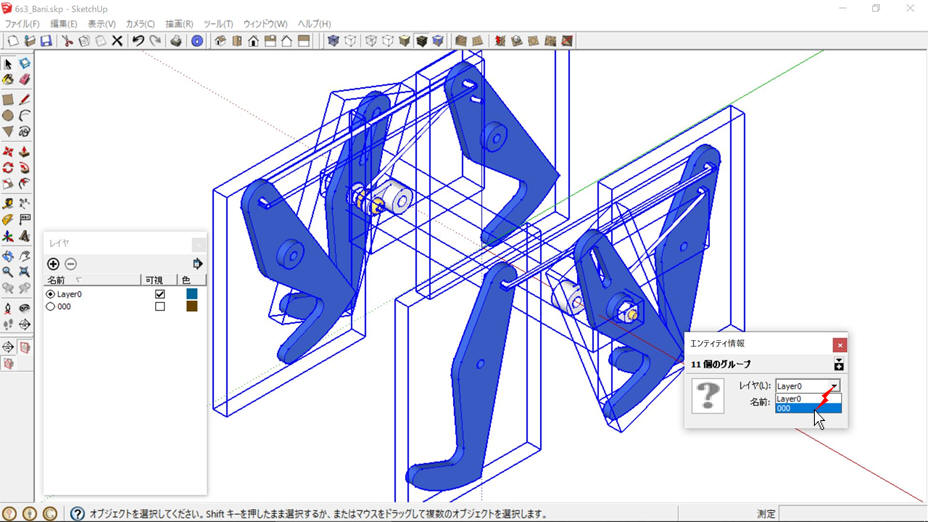
レイヤ「000」はこれで完成です。
「補助線6s3_Bani3ds.skp」を「全選択」→[コピー]
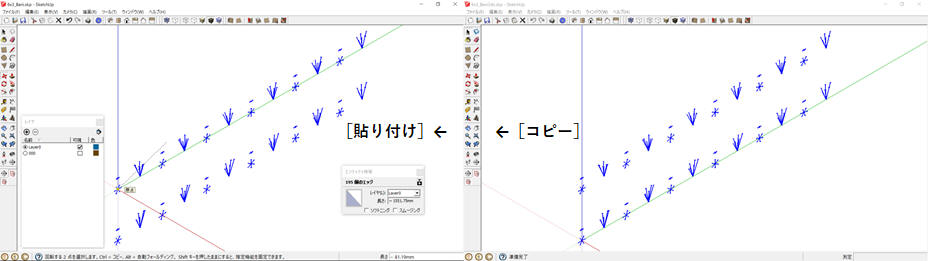
レイヤ「000」を非表示にして、現在の書込みレイヤ「Layer0」に、図のように[貼り付け]ています。
■ レイヤ間コピー
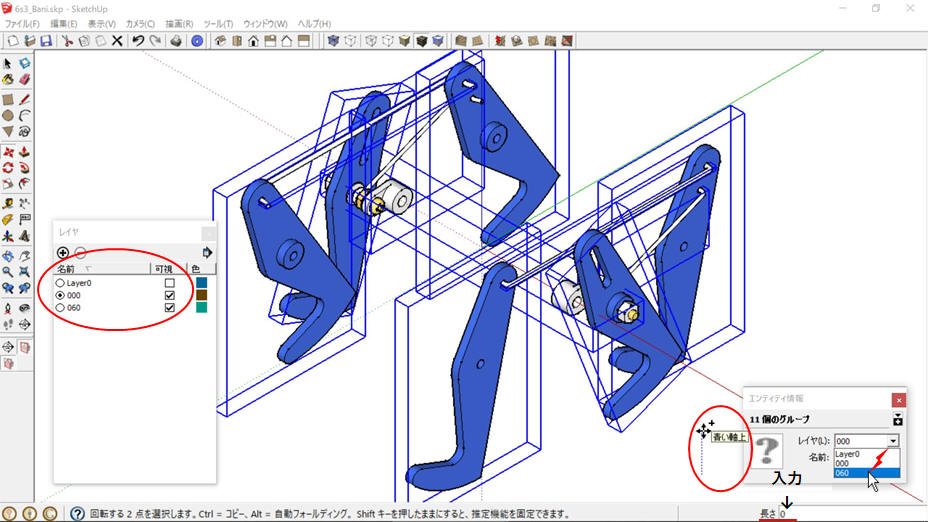
レイヤを追加→名前を「060」に変更、「000」を書込みレイヤにして「Layer0」非表示
「000」全選択(11個のグループ)、[移動]+[Ctrl(コピー)]→移動(図では「青い軸上」)→「長さ[0]」を入力
同一レイヤの同じ位置にコピーされました。コピーされた図形が選択されています。「レイヤ間移動」しましょう。
「エンティティ情報」→「名前[060]」をクリック
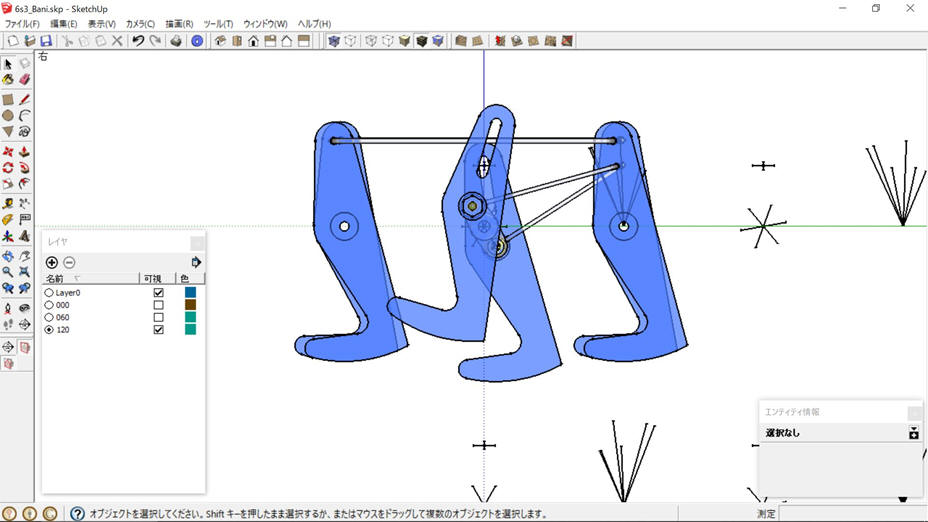
「060」を「書込みレイヤ」とし、「Layer0」表示、「000」非表示とする
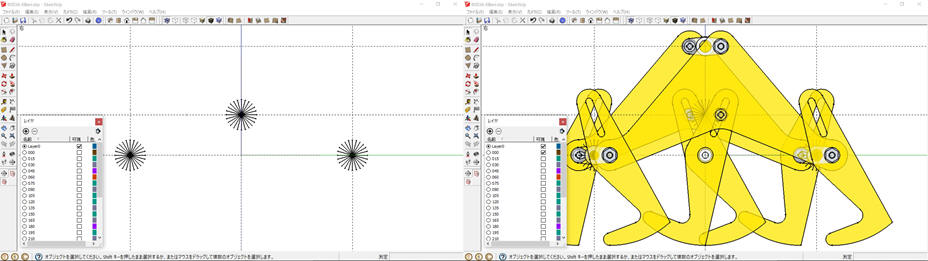
「右側面図」,「X線」表示にし、「Layer0」の「補助線(0,60,120)」が透けて見えるようにします。
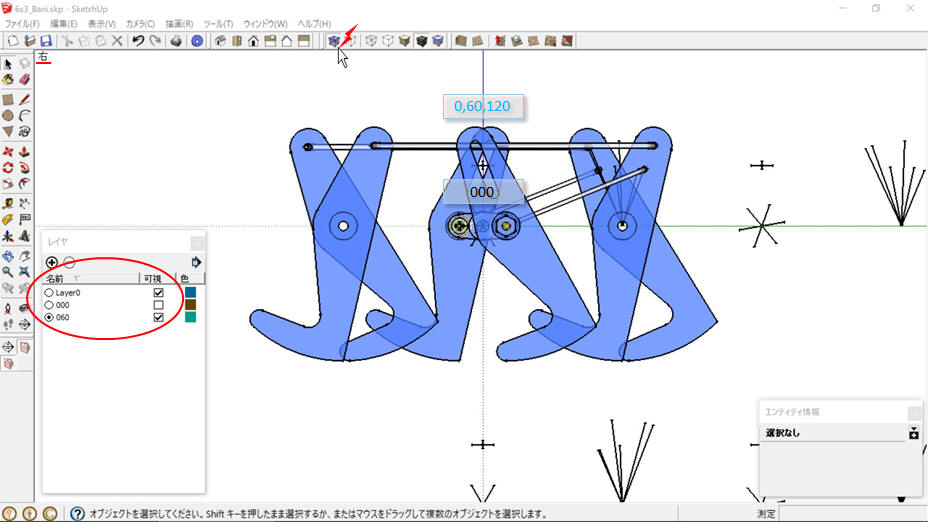
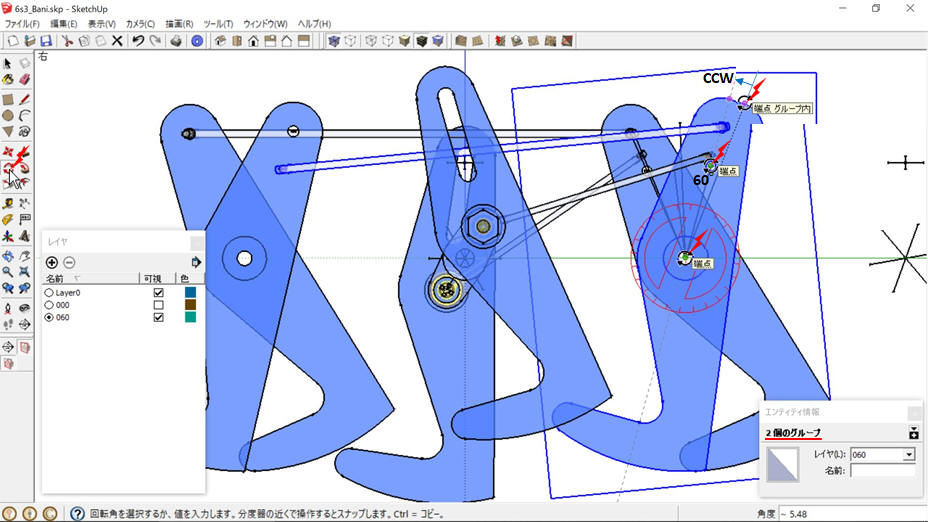
現在見えている駆動部品は「補助線0°位置」に合っています。60°位置まで動かしましょう。
■ 回転
「クランク」及び「中央足と駆動リンクロッド(左右)」を選択しています。
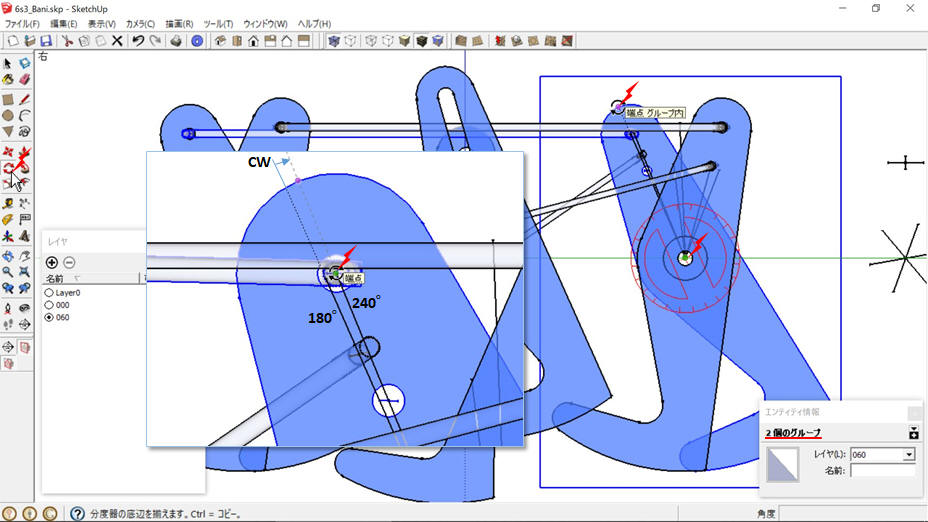
「端点(クランク回転軸センター)」をクリック→0°位置を示す「端点」をクリック→60°位置を示す「端点」をクリック(回転角~60°)
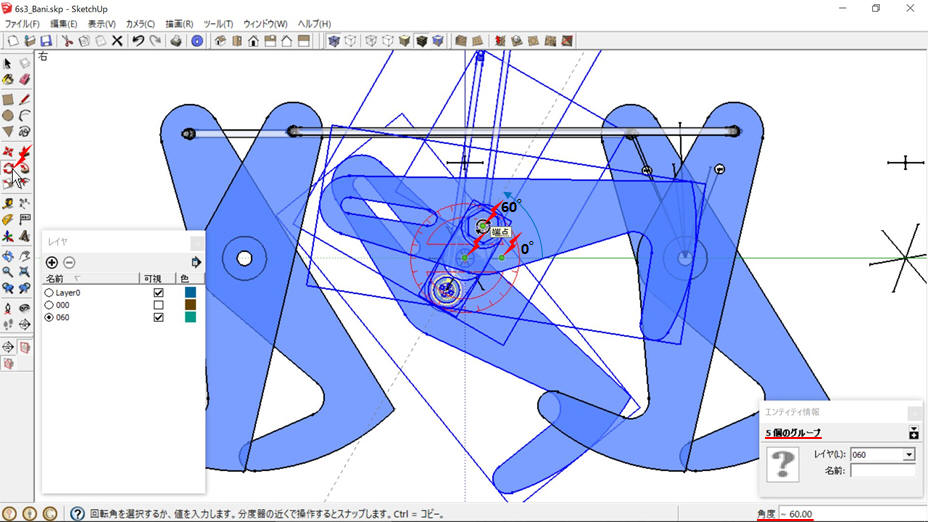
画面を十分に拡大して、「補助線」を確認してください。
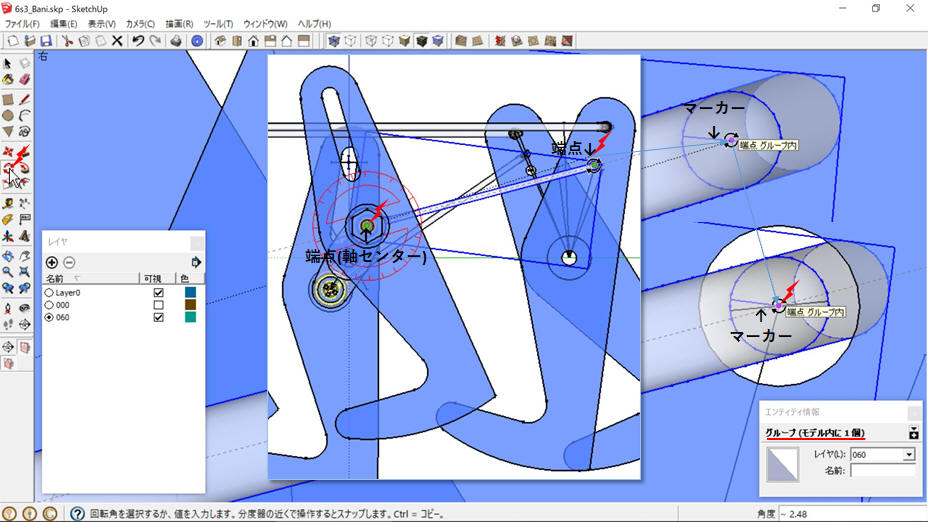
図では手前の「中央足と駆動リンクロッド」を選択しています。
「端点(軸センター)」をクリック→「端点(足のセンターライン上)」をクリック→支点のセンター「端点」をクリック
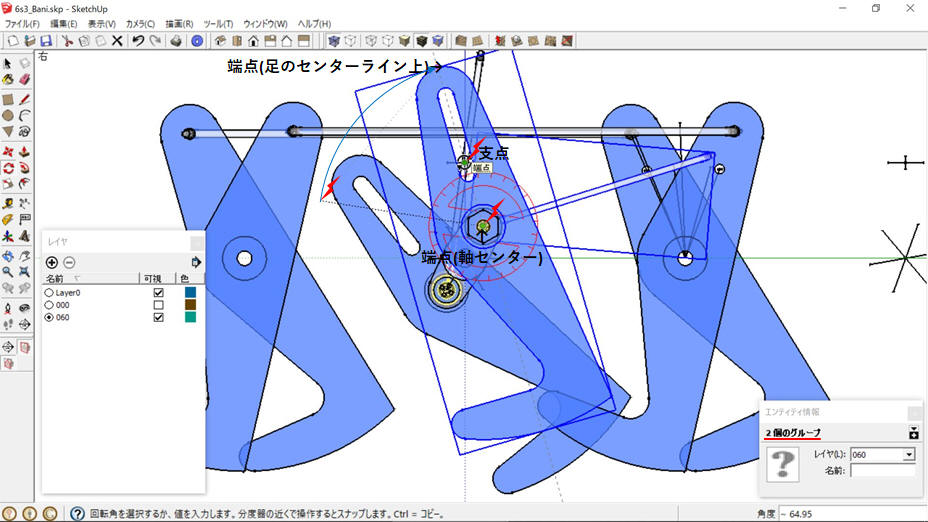
奥の「中央足と駆動リンクロッド」も同様に「支点」に合わせます。
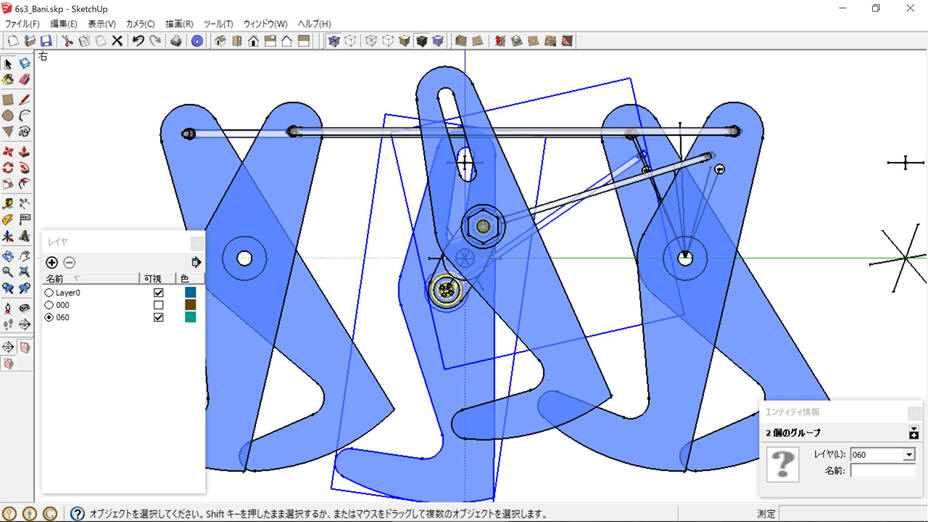
図では手前の「後足と従動リンクロッド」を選択しています。
[スペース]選択,[Q]回転
「端点(軸センター)」をクリック→「端点(足のセンターライン上)」をクリック→補助線60°「端点」をクリック
「従動リンクロッド」を水平にします。
[スペース]選択,[Q]回転
「端点(足とロッドのマーカーセンター)」をクリック→「端点(ロッドのマーカーセンター)」をクリック→水平になるよう「緑の軸上」でクリック
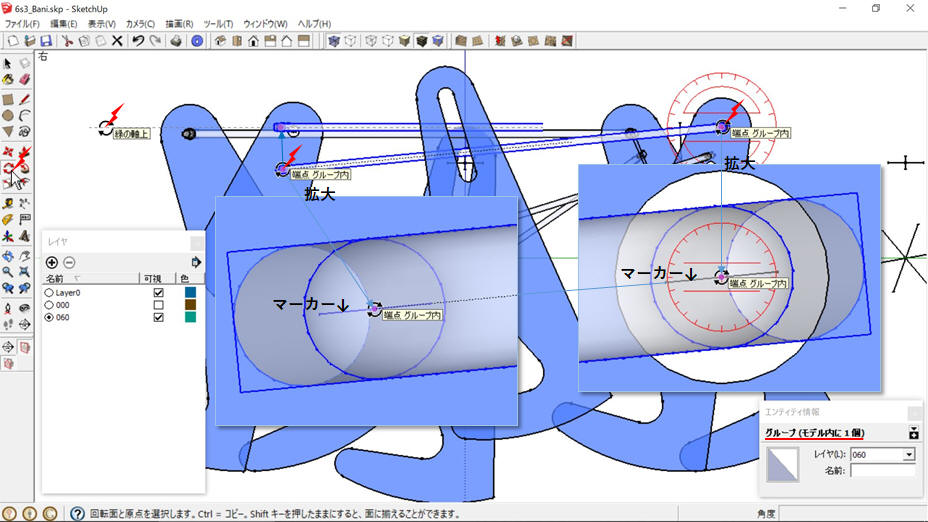
画面を十分に拡大して、「補助線(マーカー)」を確認してください。
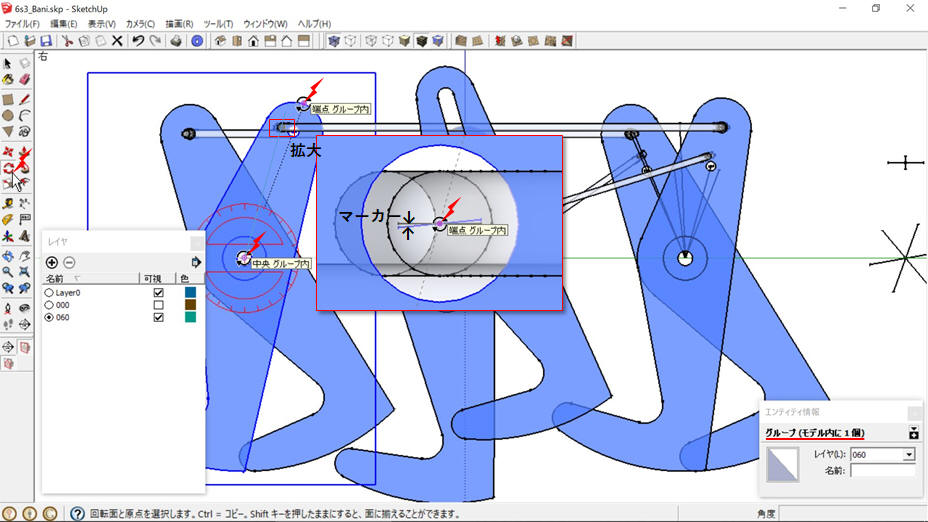
手前の「前足」を「リンクロッド」に合わせます。
[スペース]選択,[Q]回転
足の「中央 (軸センター)」をクリック→「端点(足のセンターライン上)」をクリック→「端点(足とロッドのマーカーセンター)」をクリック
手前の「駆動リンクロッド」を「後足のピン穴」に合わせます。
[スペース]選択,[Q]回転
「端点(軸センター)」をクリック→「端点(ロッドのマーカーセンター)」をクリック→「端点(足のマーカーセンター)」をクリック
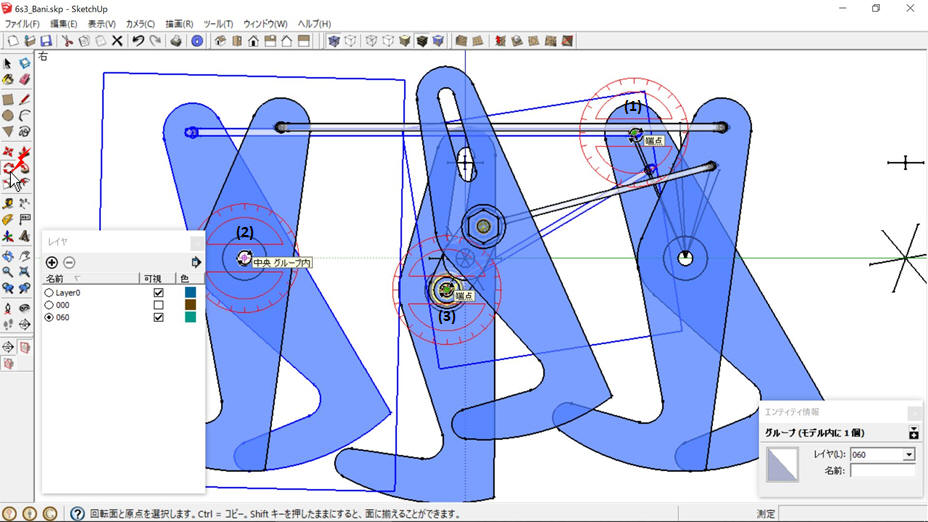
奥の「後足と従動リンクロッド」も動かしましょう。
[スペース]選択,[Q]回転
「端点(軸センター)」をクリック→「端点(足のセンターライン上)」をクリック→補助線60°+180°「端点」をクリック
[スペース]選択,[Q]回転で、奥の(1)「従動リンクロッド」(2)「前足」(3)「駆動リンクロッド」を合わせます。
レイヤ「060」を描き終えました。
次にレイヤ「120」を描きます。誤差が累積されぬよう、レイヤ「000」から「レイヤ間コピー」しています。
レイヤを追加→名前を「120」に変更、「000」を書込みレイヤにして「Layer0」,レイヤ「060」非表示
「000」全選択(11個のグループ)、[移動]+[Ctrl(コピー)]→移動(図では「青い軸上」)→「長さ[0]」を入力
同一レイヤの同じ位置にコピーされました。コピーされた図形が選択されています。「レイヤ間移動」しましょう。
「エンティティ情報」→「名前[120]」をクリック
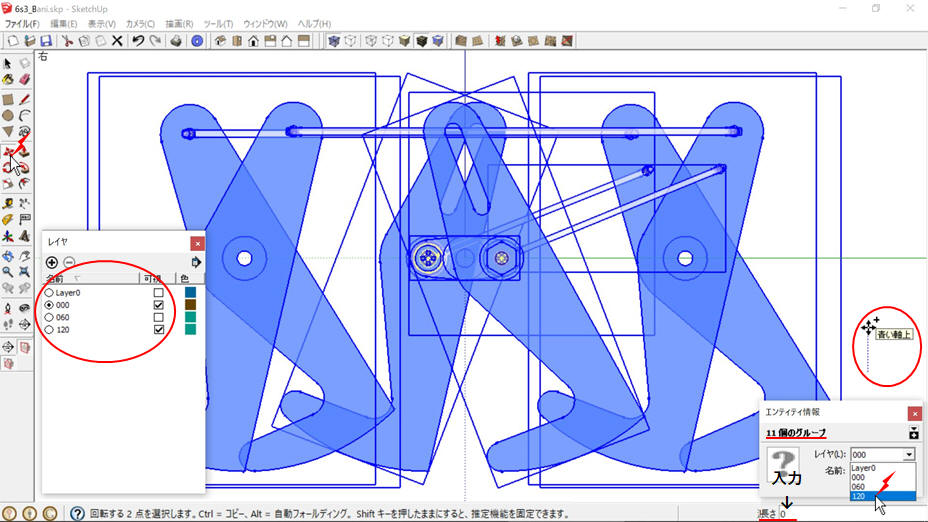
「120」を「書込みレイヤ」とし、「Layer0」表示、「000」非表示とする
現在見えている駆動部品は「補助線0°位置」に合っています。レイヤ「060」と同じ手順で120°位置まで動かしましょう。
「クランク」及び「中央足と駆動リンクロッド(左右)」→手前の「中央足と駆動リンクロッド」→奥の「中央足と駆動リンクロッド」
手前の「後足と従動リンクロッド」→「従動リンクロッド」→「前足」→「駆動リンクロッド」
奥の「後足と従動リンクロッド」、→「従動リンクロッド」→「前足」→「駆動リンクロッド」
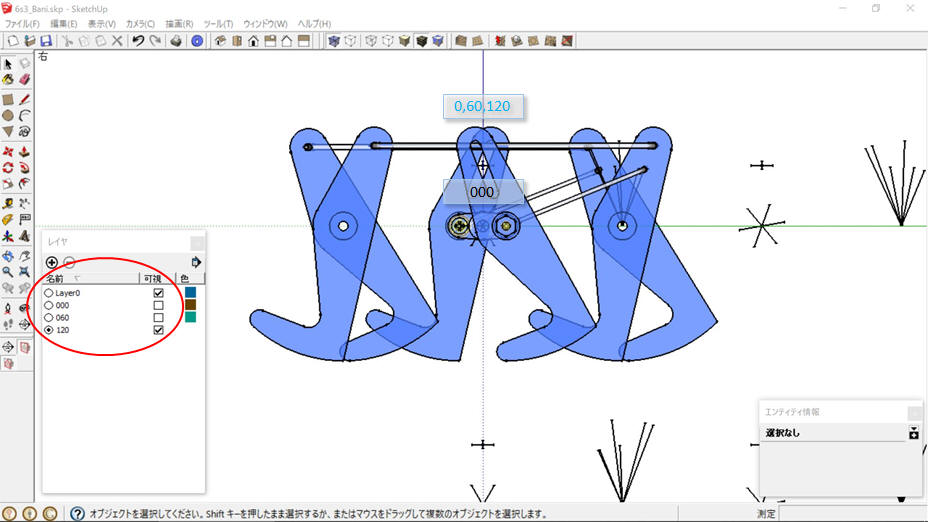
レイヤ「120」を描き終えました。
補助線(マーカー)を次のグループ(10,70,130)に変えます。
「書込みレイヤ[Layer0]」のみ表示、「全選択」→「移動(緑の軸上60)」
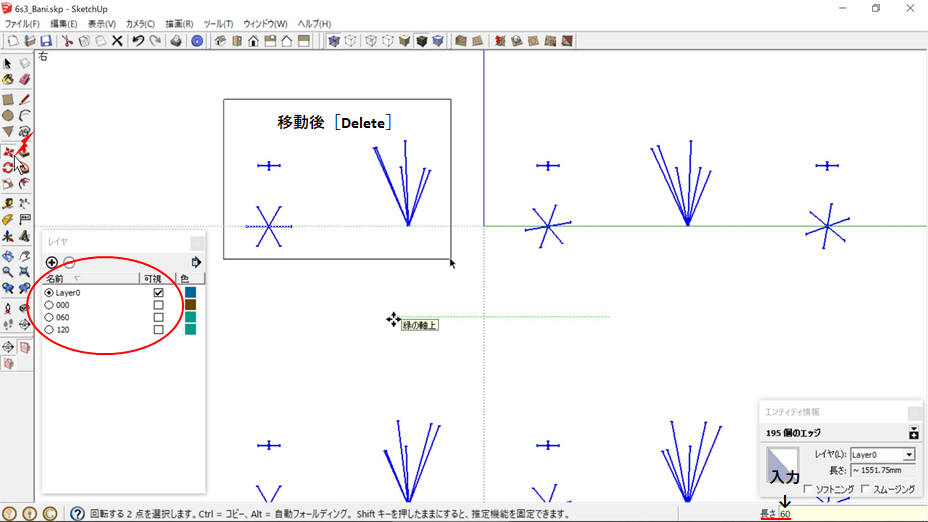
不要となったグループを削除しています。
引き続き作業を進めましょう。
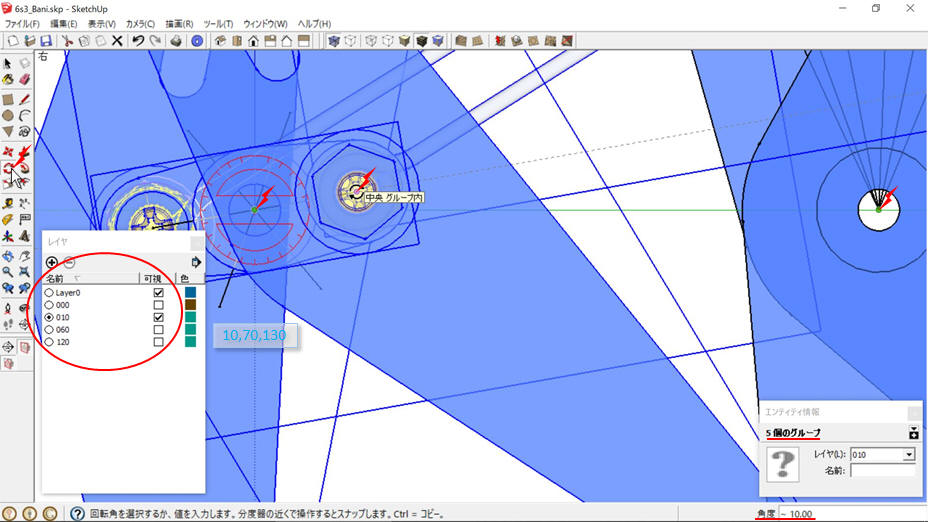
図では、追加したレイヤ「010」に「000」から「レイヤ間コピー」して、補助線の該当する角度に合わせて動かしています。
「クランク」及び「中央足と駆動リンクロッド(左右)」を選択
「端点(クランク回転軸センター)」をクリック→0°位置を示す「端点」をクリック
→10°位置を示す「端点(ここでは「中央 グループ内」と表示されている)」をクリック、「角度(~10.00)」を確認
レイヤ「010」を描き終え、レイヤ「070」,「130」と描き進めます。
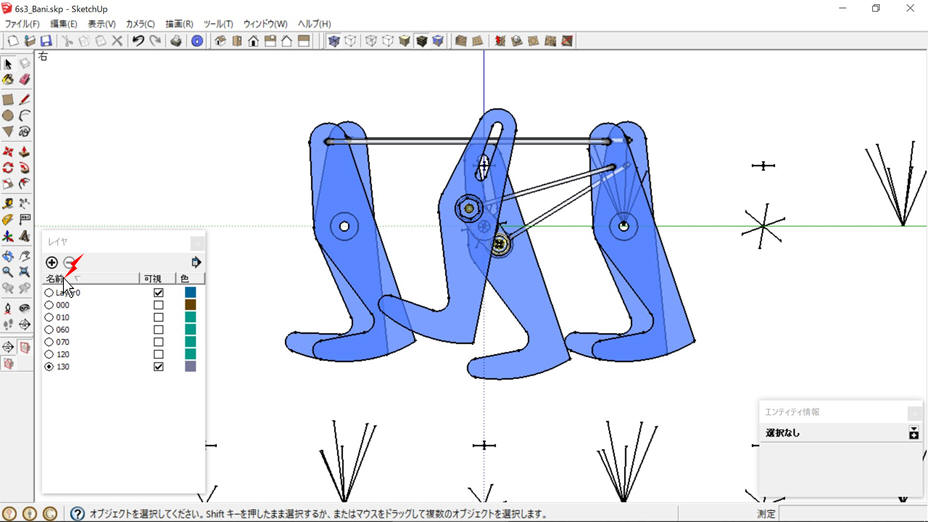
レイヤ「130」まで描き終え、レイヤ名の昇順で並び替えています。
作業を繰り返し、「レイヤ36」まで描き終えました。
「補助線」削除、レイヤ順に表示する「シーン」を作成
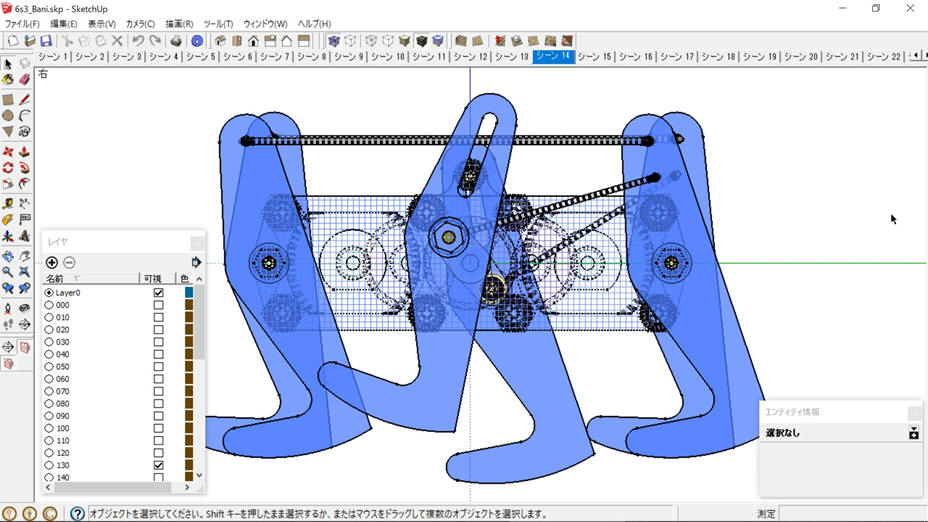
図では説明のため「隠しジオメトリ」を表示しています。
アニメーションを設定したものを「6s3_Bani-migi.skp」、さらにシーンを更新したものを「6s3_Bani-toukaku.zip」として保存しています。
アニメーションのコマ数を減らす
「六足歩行アクリルロボットB」
 より、同上の手順で作図しています。
より、同上の手順で作図しています。
1サイクル(360°)の各シーン(クランク回転12°毎)を30のレイヤに描き分ける
 3×5×2 = 30コマ
3×5×2 = 30コマ
補助線(マーカー)を2D_CADで描き、3DS出力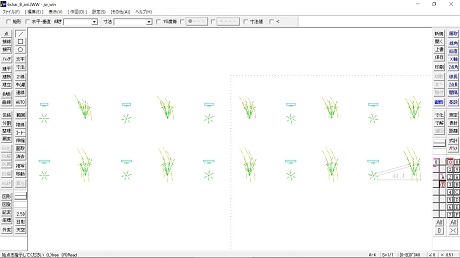 [6shar_B_ani.JWW] |
3DSデータのインポート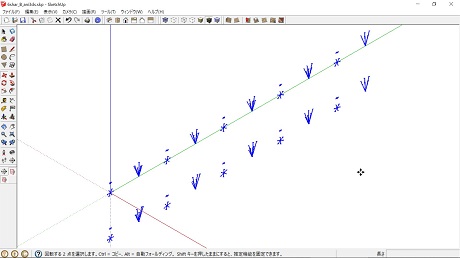 [6shar_B_ani3ds.skp] |
レイヤ作成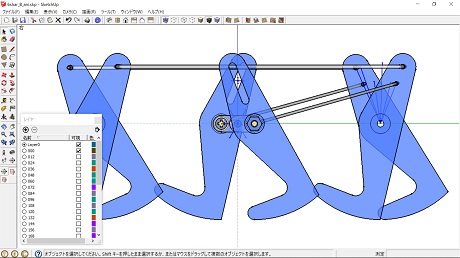 |
シーン作成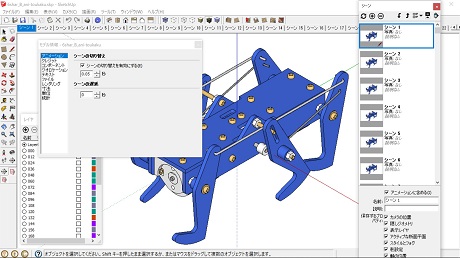 |
GIFアニメ(1ループ2.88秒)で表示しています。
 |
 |
| [6shar_B_ani-migi.skp] | [6shar_B_ani-toukaku.zip] |
比較のため、コマを間引いて再生
 1/2 15コマ |
 1/3 10コマ |
六足歩行アクリルロボット(三角板リンク機構タイプ)「akurirurobo_8003A-6B」
1サイクル(360°)の各シーン(クランク回転15°毎)を、24のレイヤに描き分けるための「補助線」を、「Layer0」に描いています。
補助線を頼りに、「三角リンク板」のみ「移動(長さ:~1.31mm)」、他は「回転(15°)」
15°毎に描き終えて「レイヤ間コピー」しています。
 [8003A-6Bani-migi.skp] |
 [8003A-6Bani-toukaku.zip] |
[戻る↑]
合志市栄のマイファブラボ SAKAEPC ものづくりサポートCAD講座 [目次へ] [←前へ][次へ→]