合志市栄のマイファブラボ SAKAEPC |
ものづくりサポートCAD講座アクリルロボット 全体組立・・・組立図をまとめる |
|
|
本体組図の3D図作成 |
参照 部品表、「ギアボックスASSY 8003A-0700-00 外部リンク」及び「全体図及び配線図 8003A-1000-00 外部リンク」■ コピー&ペースト |
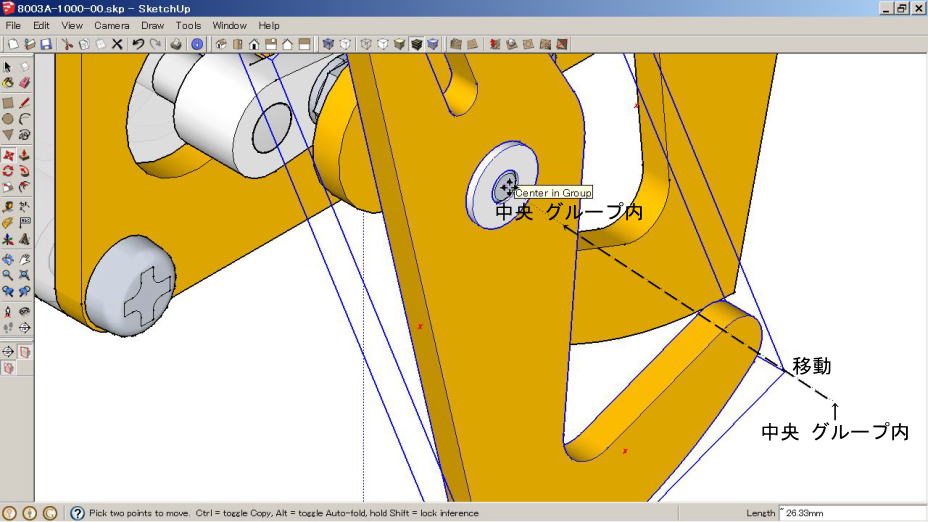
| ここでは「足部ASSY R_L 8003A-0900R_L-00.skp」を開き、他の部品を組み込んでいきます。 「ギアボックスASSY 8003A-0700-00.skp」を組み込む 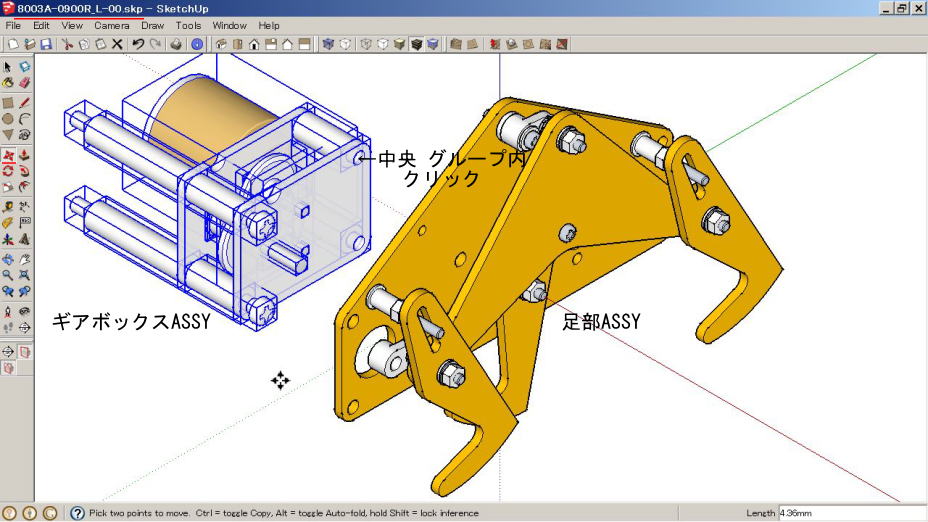 移動の基点として取付穴の中心をクリック ■ 移動(複数) |
移動先の基点として相手の取付穴の中心をクリック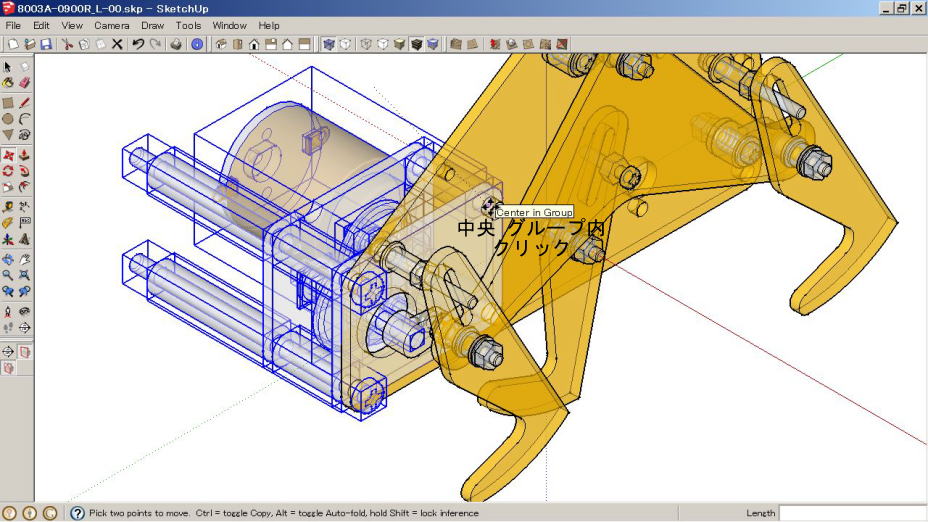 「8003A-1000-00.skp」と名前を付けて保存しています。 同様に、「対辺5.5,4.0ナイロンナット 8000-0001_2-00.skp」から対辺5.5ナイロンナットを組み込む 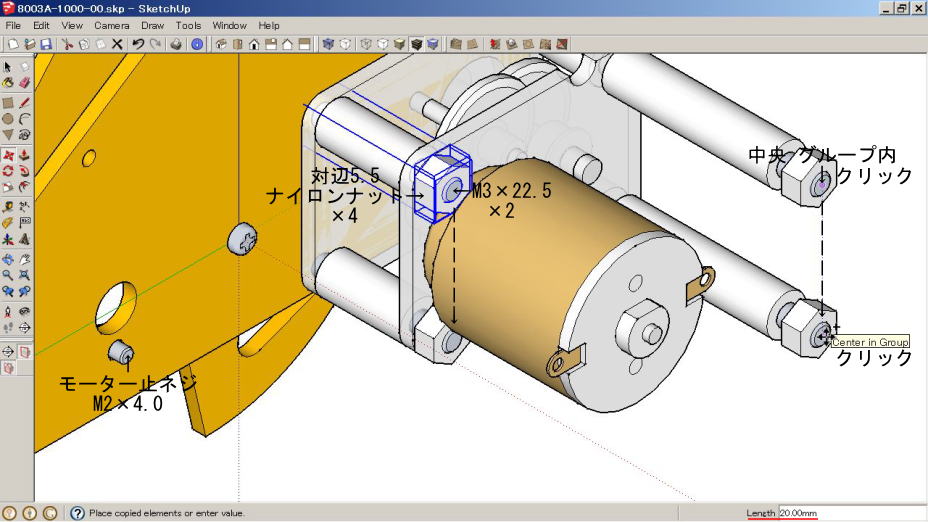
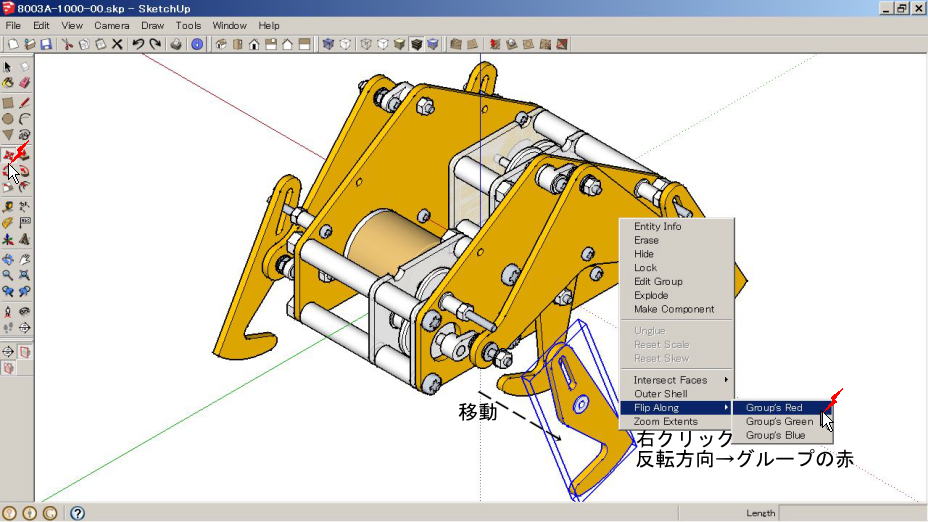
全体の半分が作図できました。残りと回転対象になっています。回転複写で残りを作図しましょう。 ■ [メジャー]ツールで距離を測定 |
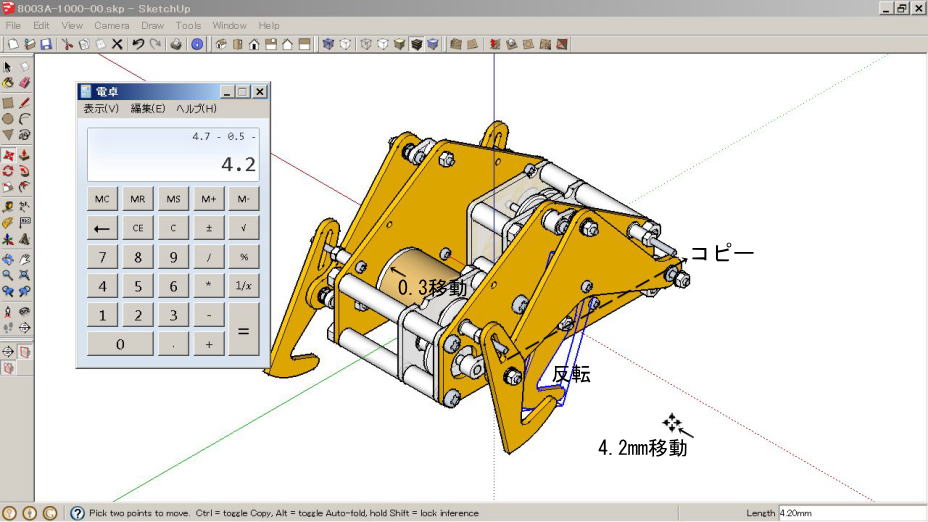
全体の中心(平面図方向)を求めるため、図の位置の「原点」からの「赤い軸」方向の距離を測定します。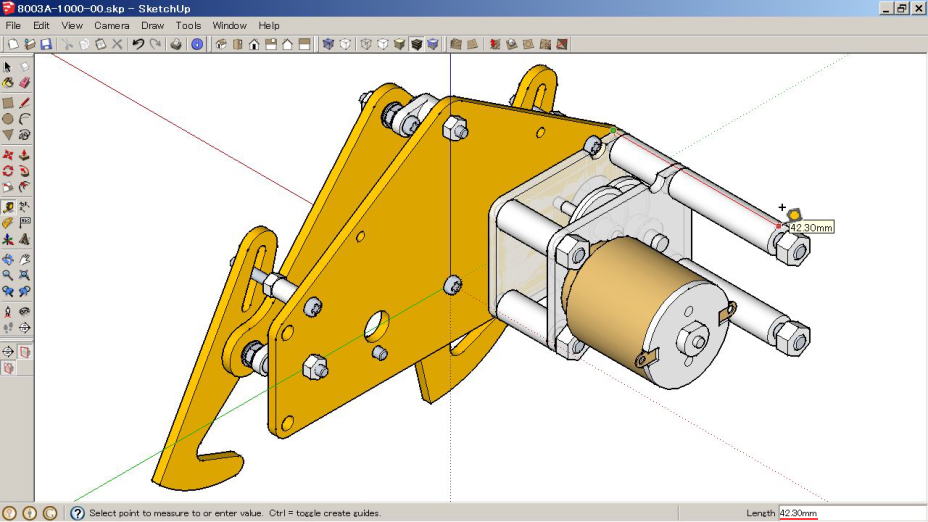
■ 移動 |
| 「原点」を全体の中心にします。 全選択、測定値の1/2移動 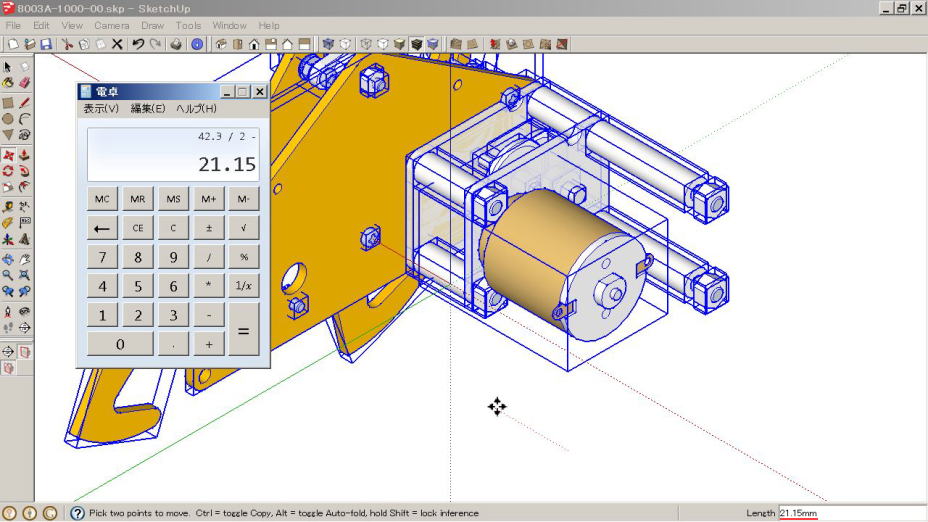
■ 回転複写 |
| [Rotate(回転)]ON(ショートカット[Q])、[Ctrl]キーを一度押す(コピー) (1) ポインタ(青い分度器)で「原点」をクリック (2) 「赤い軸」上でクリック→回転の基準線指定 (3) ポインタを移動して、「赤い軸上」と表示される位置でクリック→回転の角度(180°)指定 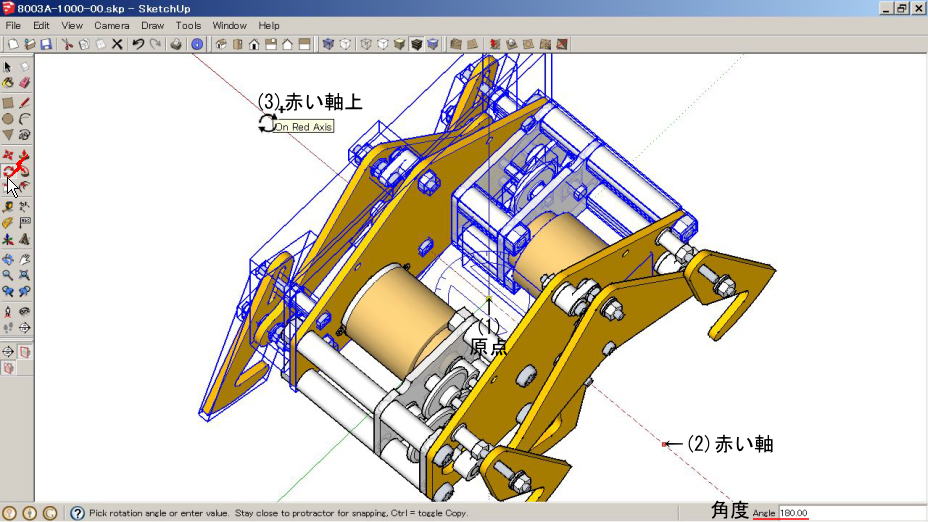
足の向きが逆になっています。変更前に位置を計測しておきましょう。 ■ [メジャー]ツールで距離を測定 |
ここではアクリル板の表面を基準として、ビスの先端までの距離を測定しています。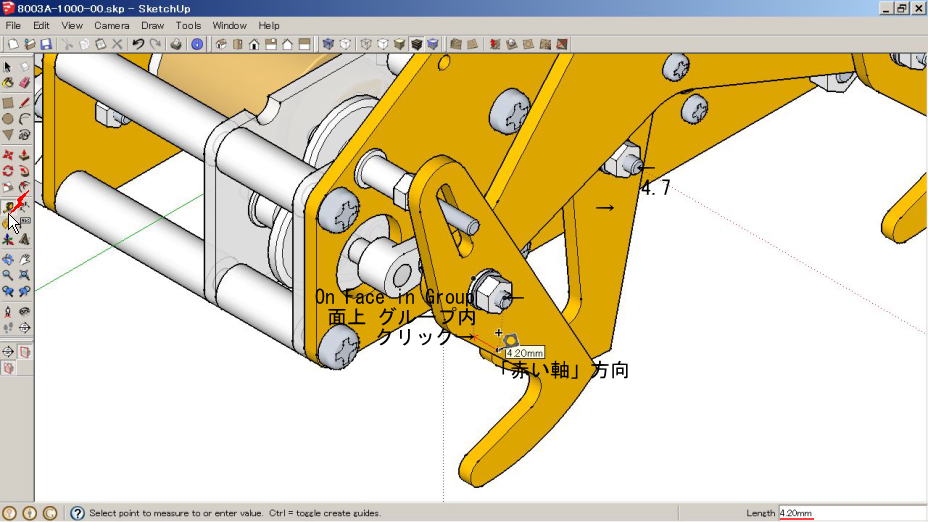
■ 移動 ■ 反転 |
|
足の一つを編集しやすい場所に移動 移動して、フランジの表面とビスの先端面の中心を合わせる 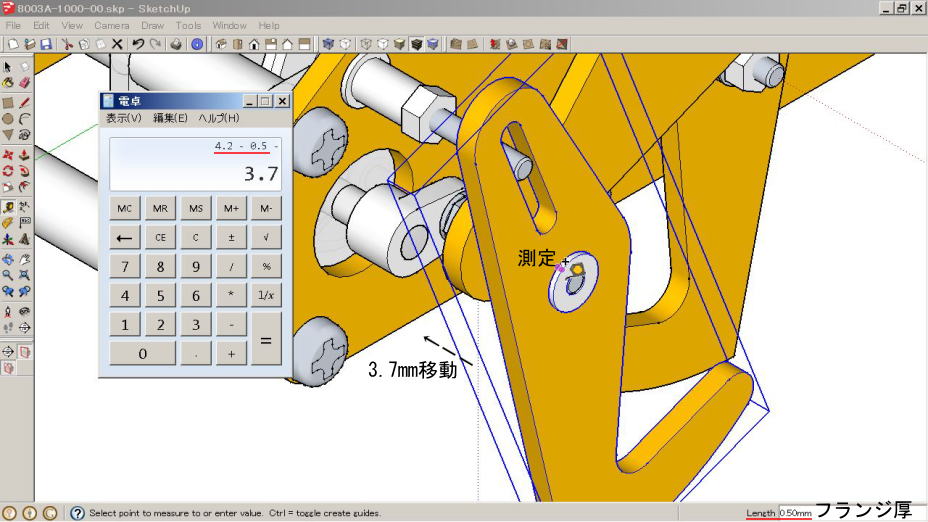
同様に、他の足も編集(反転、移動、コピー) ■ 「スタイル」の編集 |
| メニューから [Window(ウィンドウ)]→[Styles(スタイル)]→[Edit(編集)] 「Edge Settings(エッジ設定)」の内容を図のように変更 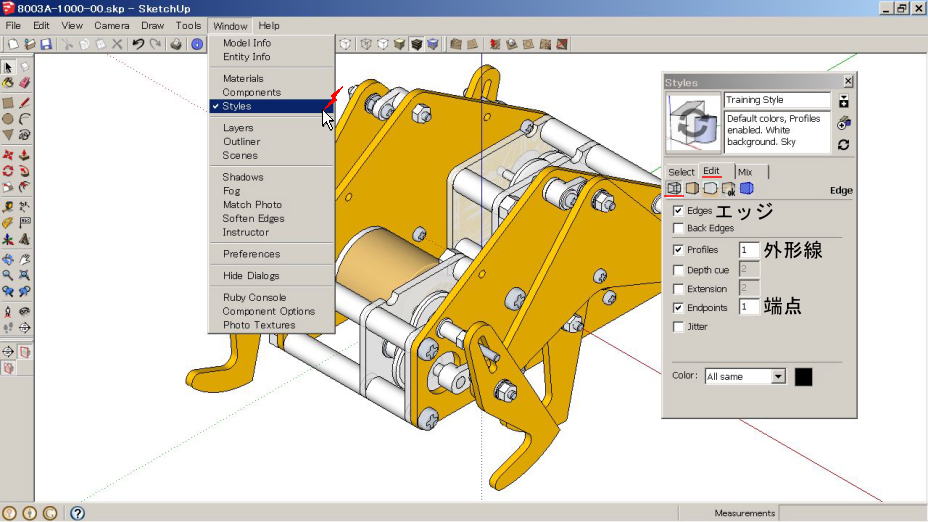
六足歩行アクリルロボット(三角板リンク機構タイプ)の本体組立完成です。 「アクリルロボット akurirurobo_8003A-6B」と名前を付けて、「SAKAEPC - 3D Warehouse」にアップロードしています。 2016年3月30日更新 |
|
合志市栄のマイファブラボ SAKAEPC ものづくりサポートCAD講座 [目次へ] [←前へ][次へ→] |